Clear Sky Science · de
Wegplanung für Manipulatoren basierend auf dem planar eingeschränkten RRT*-Algorithmus
Roboter, die sich in beengten Räumen zurechtfinden
Fertigungsroboter teilen sich häufig enge Arbeitsbereiche mit sperrigen Maschinen, Karosserien, Flugzeugblechen und anderen Hindernissen. Um nützliche Arbeit zu leisten, muss ein Roboterarm sein Werkzeug von einem Punkt zum anderen bewegen, ohne irgendwo anzustoßen, dabei kurz, glatt und zuverlässig bleiben. Diese Studie stellt eine neue Planungsmethode vor, die Roboterarmen hilft, in überfüllten dreidimensionalen Umgebungen klarere und sicherere Bahnen zu verfolgen.
Warum Wegplanung wichtig ist
Moderne Fertigung verlässt sich auf Roboterarme, um große, komplexe Bauteile wie Karosserien, Schiffsaußenhaut und Flugzeugverkleidungen zu vermessen und zu prüfen. Bei vielen dieser Aufgaben bleibt die Anordnung des Arbeitsraums von einem Durchgang zum nächsten gleich, aber der Arm muss dieselbe Bewegung immer wieder ausführen. In diesem Umfeld ist es deutlich wertvoller, eine ausgezeichnete kollisionsfreie Bahn zu finden als nur schnell eine gerade noch akzeptable Route zu ermitteln. Eine kürzere, glattere Bahn spart Energie, reduziert Verschleiß an den Gelenken und lässt das Inspektionssystem langfristig schneller und konsistenter laufen.
Grundidee: Bewegung auf eine Ebene lenken
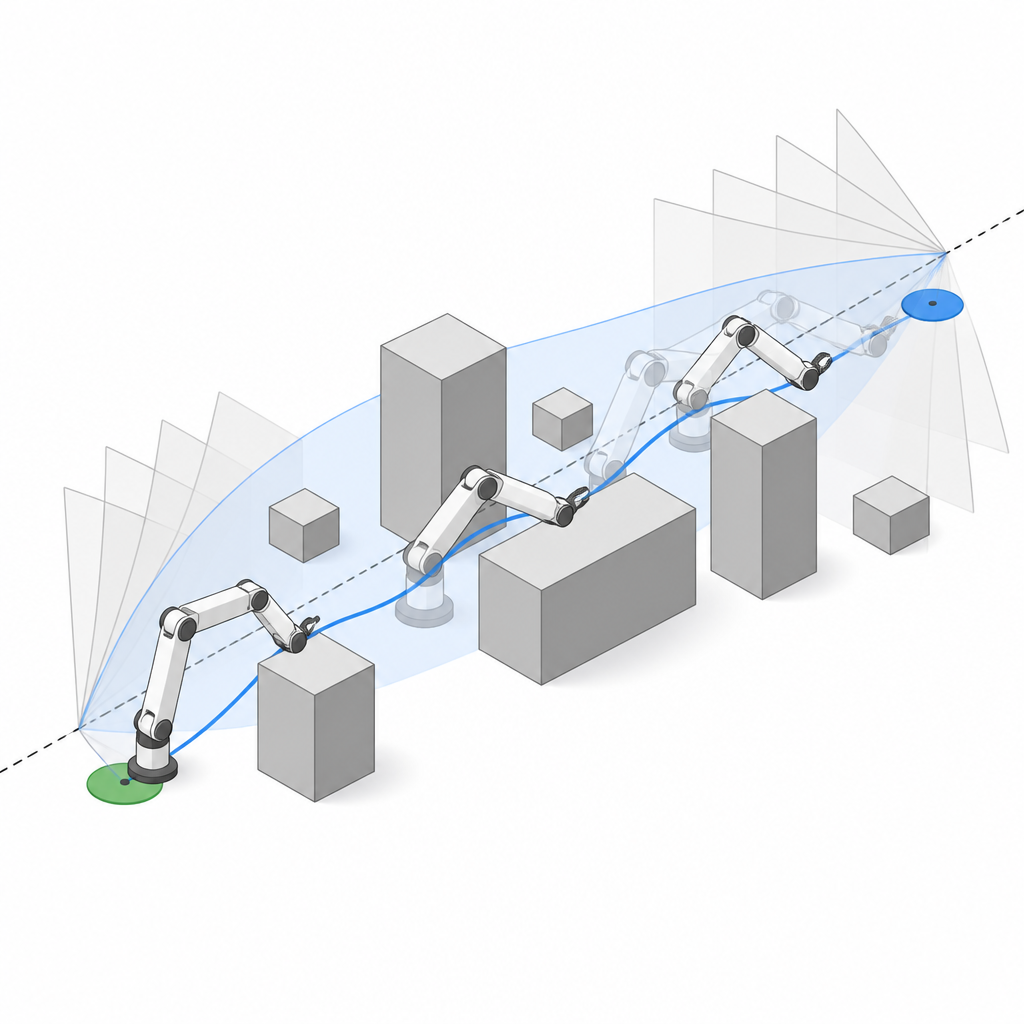
Die Autoren bauen auf einem populären Sampling-Ansatz namens rapidly exploring random trees auf, der normalerweise Stichprobenpunkte im dreidimensionalen Raum verteilt, bis er zufällig eine Route zwischen Start und Ziel findet. Ihre Schlüsseländerung besteht darin, diese Stichprobenpunkte auf eine sorgfältig gewählte Ebene zu beschränken, die durch die Start- und Endpositionen des Roboters verläuft. Anstatt die Suche blind in alle Richtungen wandern zu lassen, drehen sie diese Ebene wie ein Blatt um die Gerade zwischen den beiden Punkten und prüfen viele gleichmäßig verteilte Winkel. Auf jeder Ebene planen sie einen Weg, der die bekannten Hindernisse umgeht, und bewerten ihn anschließend mit einer gewichteten Kombination aus Pfadlänge, Planungszeit und Anzahl der Knicke in der Route.
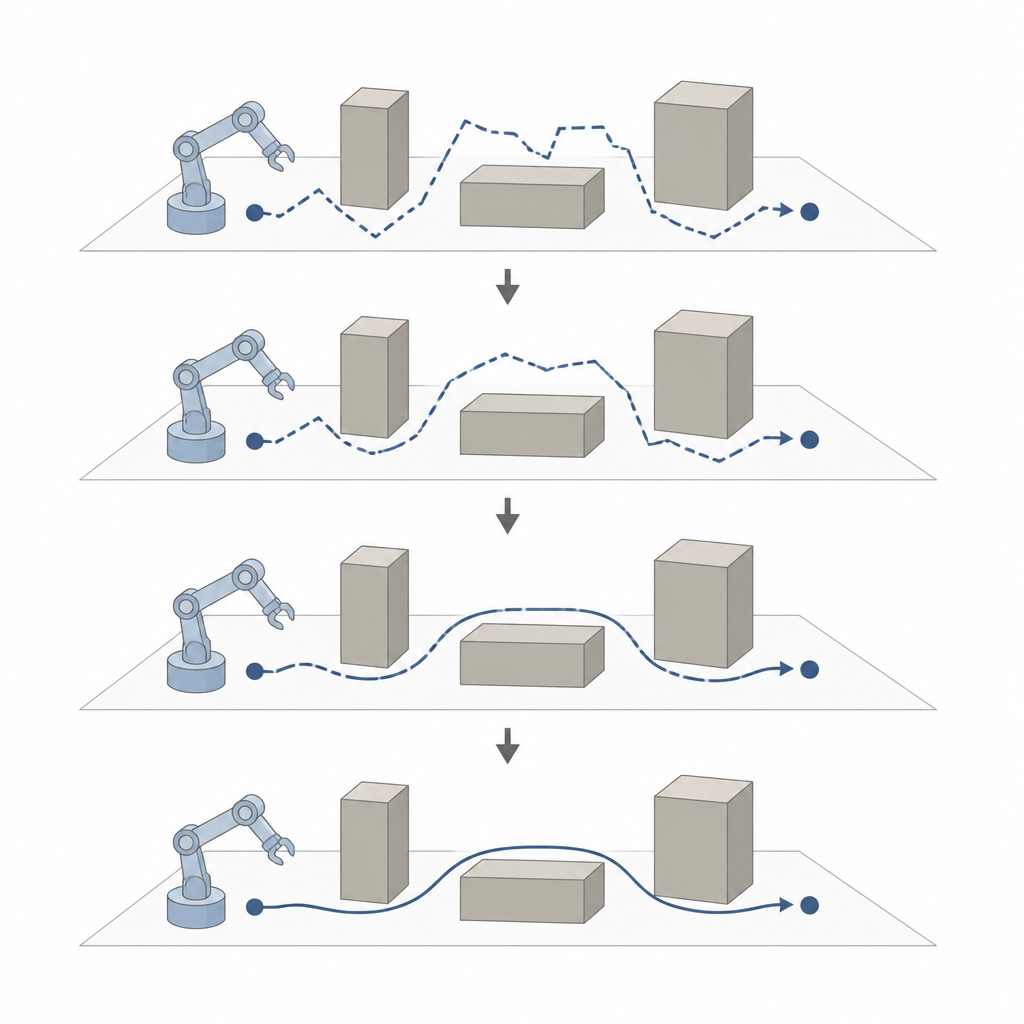
Wie die Methode Bahnen formt und glättet
Sobald Kandidatenrouten von den verschiedenen Ebenen gesammelt sind, wählt die Methode die mit der niedrigsten Gesamtbewertung aus und verfeinert sie. Zusätzliche Schritte weisen Verbindungen zwischen Wegpunkten neu zu und schneiden Umwege ab, sodass der Baum möglicher Bewegungen allmählich zu einer kürzeren Linie zusammenschrumpft. Um scharfe Ecken zu vermeiden, die die Robotergelenke rucken oder stoppen lassen würden, passen die Autoren die ausgewählte Route anschließend an eine glatte Kurve vierten Grades an. Außerdem verschieben sie jeden Punkt, der einem Hindernis zu nahe kommt, bevor sie die Anpassung vornehmen, und berechnen die fehlenden Tiefenwerte neu, sodass die gesamte Bahn weiterhin auf der gewählten Ebene liegt.
Tests in überfüllten virtuellen und realen Welten
Das Team testet seine planar eingeschränkte RRT*-Methode in mehreren simulierten Hindernisfeldern und in Experimenten mit einem sechsachsigen Messroboter, der von einem Lasersystem verfolgt wird. Sie vergleichen sie mit dem ursprünglichen RRT-Verfahren, einer verbesserten RRT*-Version und einer populären lernbasierten Methode namens Q-Learning. In verschiedenen Hinderniskonfigurationen erzeugt ihr Ansatz durchweg Routen, die kürzer sind und weniger Zwischenpunkte benötigen, während er außerdem weniger Laufzeitvarianz zeigt. In einer Versuchsreihe sinkt die durchschnittliche Pfadlänge um mehr als ein Drittel gegenüber dem klassischen RRT und um über vierzig Prozent gegenüber Q-Learning, und die Zahl der Wegpunkte wird ungefähr halbiert.
Wann die planare Abkürzung funktioniert — und wann nicht
Die Idee, die Bewegung auf einer Ebene zu leiten, kann nicht jedes Navigationsproblem lösen. Rohrartige Durchgänge oder sehr dichte Hinderniscluster können einen Roboter zu Manövern zwingen, die keine einzelne flache Ebene erfassen kann. Um solche Fälle vorzusehen, fügen die Autoren einen schnellen Check hinzu, der die unmittelbare Umgebung von Start- und Endpunkt betrachtet. Wenn Hindernisse diese Positionen innerhalb eines bestimmten Radius eng einkreisen, kennzeichnet die Methode die Szene als unwahrscheinlich für eine saubere planare Lösung und schlägt vor, einen allgemeineren Planer zu verwenden.
Was das für echte Roboterarme bedeutet
Für viele Inspektions- und Messaufgaben, bei denen die Anordnung fest ist, bietet diese planar geführte Strategie eine praktische Möglichkeit, etwas Offline-Rechenaufwand gegen dauerhafte Vorteile im täglichen Betrieb einzutauschen. Indem die Suche auf eine intelligent rotierte Ebene gelenkt und die Route danach geglättet wird, hilft die Methode Roboterarmen, sich mehr wie eine ruhige menschliche Hand als wie eine zittrige Maschine zu bewegen. Das Ergebnis ist ein Weg, der kürzer, besser reproduzierbar und schonender für die Hardware ist — was präzise automatisierte Messungen sicherer und effizienter macht.
Zitation: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
Schlüsselwörter: Wegplanung für Roboterarme, Kollisionsvermeidung, RRT*-Algorithmus, industrielle Inspektion, Glättung von Roboterbewegungen