Clear Sky Science · he
תכנון מסלולים למניפולטורים על בסיס האלגוריתם RRT* עם אילוץ מישורי
רובוטים שמוצאים את דרכם במרחבים צרים
רובוטים במפעלים לרוב חולקים מרחבי עבודה צפופים עם מכונות גדולות, שלדות רכב, פאנלי מטוסים ומכשולים אחרים. כדי לבצע עבודה שימושית חייבת זרוע הרובוט להעביר את הכלי מנקודה לנקודה בלי להתנגש במשהו, תוך שמירה על תנועה קצרה, חלקה ואמינה. המחקר הזה מציג שיטה תכנונית חדשה שעוזרת לזרועות רובוט לזכות במסלולים נקיים ובטוחים יותר בסביבות תלת־ממד צפופות.
למה תכנון מסלול חשוב
ייצור מודרני נשען על זרועות רובוט למדידות ולבדיקות של חלקים גדולים ומורכבים כמו קליפות רכבים, דפנות ספינות ועור מטוסים. בעבודות רבות של פרויקטים כאלה פריסת מרחב העבודה נשארת דומה ממשימה למשימה, אך הזרוע חייבת לחזור על אותה תנועה שוב ושוב. בהקשר כזה, יש ערך רב יותר בגילוי מסלול מעולה אחד שאין בו התנגשות מאשר במציאת מסלול מתקבל על הדעת במהירות גבוהה. מסלול קצר יותר וחלק יותר חוסך אנרגיה, מקטין בלאי במפרקים ומאפשר למערכת הבדיקה לפעול מהר יותר ובאופן עקבי לאורך זמן.
הרעיון הבסיסי של הנחיית התנועה למישור
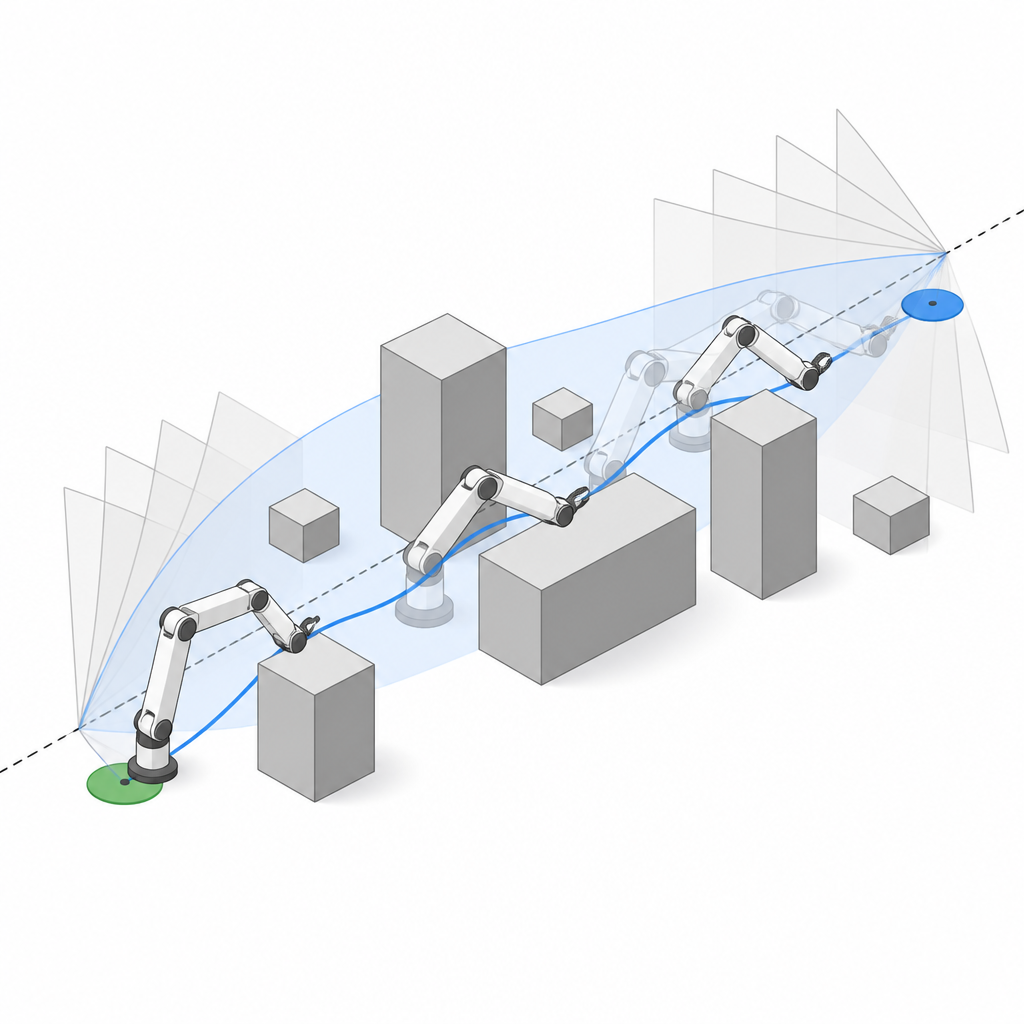
המחברים בונים על שיטה פופולרית של דגימה הנקראת עצי חיפוש מהירים אקראיים (rapidly exploring random trees), שבדרך כלל מפזרים נקודות ניסוי בכל נפח המרחב התלת־ממדי עד שהם מוצאים בדרך אקראית נתיב בין נקודת ההתחלה והיעד. החידוש המרכזי שלהם הוא להגביל את נקודות הניסוי למישור שנבחר בקפידה שעובר דרך מיקומי ההתחלה והסיום של הרובוט. במקום לתת לחיפוש לנדוד באקראיות לכל הכיוונים, הם מסובבים את המישור הזה כגיליון סביב הקו הישר בין שתי הנקודות, ובודקים זוויות מרוּוּחות באופן שווה. על כל מישור הם מתכננים מסלול שעוקף את המכשולים הידועים ולאחר מכן מדרגים אותו באמצעות תערובת משוקללת של אורך המסלול, זמן התכנון ומספר הפניות במסלול.
כיצד השיטה מעצבת ומחליקה מסלולים
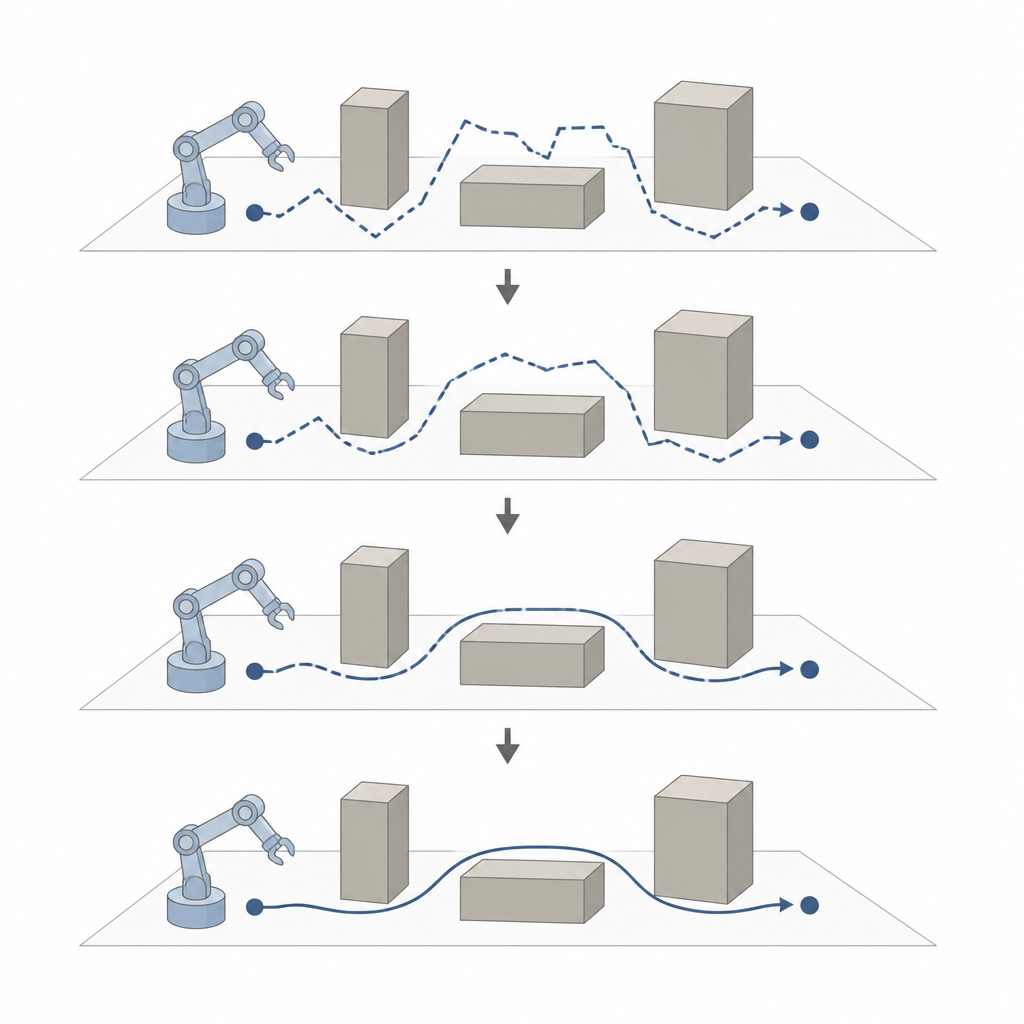
כאשר נאספים מסלולים מועמדים מהמטוסים השונים, השיטה בוחרת את זה עם הציון הכולל הנמוך ביותר ומלטשת אותו. צעדים נוספים משייכים מחדש את הקישורים בין נקודות הדרך וגוזרים סטיות, כך שעץ התנועות האפשרי מתמוטט בהדרגה לקו קצר יותר. כדי להימנע מפינות חדות שהיו מכריחות את מפרקי הרובוט לדלג או לעצור, החוקרים מתאיםים את המסלול הנבחר לעקומה חלקה המתוארת על ידי פולינום מדרגה רביעית. הם גם מזיזים בעדינות כל נקודה שעוברת קרוב מדי למכשול לפני ההתאמה ומחשבים מחדש את ערכי העומק החסרים כדי שכל המסלול יישאר על המישור שנבחר.
מבחנים בעולמות מדומים וממשיים צפופים
הצוות בוחן את שיטת RRT* עם אילוץ מישורי במספר שדות מכשולים מדומים ובניסויים עם רובוט מדידה בעל שישה מפרקים שעוקב אחריו מערכת לייזר. הם משווים אותה לשיטת RRT המקורית, גרסה משופרת של RRT* ולשיטה מבוססת למידה פופולרית בשם Q learning. על פני פריסות מכשולים שונות, הגישה שלהם מייצרת בעקביות מסלולים קצרים יותר עם פחות נקודות ביניים, ובמקביל מציגה פחות שונות מריצה לריצה. בבחינה אחת ממוצע אורך המסלול יורד ביותר משליש בהשוואה ל-RRT הקלאסי וביותר מארבעים אחוזים בהשוואה ל-Q learning, ומספר נקודות הדרך מצטמצם בערך בחצי.
מתי הקיצור המישורי יעבוד ומתי לא
הרעיון של הנחיית תנועה על מישור אינו פותר כל בעיית ניווט. מעבר בצורת צינור או אשכולות צפופים מאוד של מכשולים עשויים לכפות על הרובוט להתפתל באופן שאף גיליון שטוח יחיד לא יוכל לתאר. כדי לצפות מקרים כאלה מוסיפים המחברים בדיקה מהירה הבוחנת את הסביבה המיידית של נקודות ההתחלה והסיום. אם מכשולים מקיפים בחוזקה את המיקומים הללו בתוך רדיוס מסוים, השיטה מסמנת את הסצנה כסבירה שלא תאפשר פתרון מישורי נקי, ומה שמומלץ הוא להפעיל מתכנן כללי יותר.
מה זה אומר עבור זרועות רובוט אמיתיות
לעבודות רבות של בדיקה ומדידה שבהן הפריסה קבועה, אסטרטגיה מונחית זו עלולה להציע דרך מעשית להחליף מעט חישוב מקדמי ברווחים מתמשכים בתפעול יומי. על ידי כיוון החיפוש אל מישור המסובב בתבונה ולאחר מכן החלקת המסלול, השיטה מסייעת לזרועות רובוט לנוע יותר כמו יד אנושית יציבה ופחות כמו מכונה סוערת. התוצאה היא מסלול קצר יותר, בעל חזרתיות גבוהה יותר וידידותי יותר לחומרה, מה שהופך מדידות אוטומטיות מדויקות לבטוחות ויעילות יותר.
ציטוט: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
מילות מפתח: תכנון מסלול לזרוע רובוטית, מניעת התנגשות, אלגוריתם RRT סטאר, בדיקות תעשייתיות, החלקת תנועת רובוט