Clear Sky Science · ru
Планирование траекторий манипуляторов на основе алгоритма RRT* с планарным ограничением
Роботы, ищущие путь в тесных пространствах
Фабричные роботы часто работают в стеснённых условиях рядом с громоздкими станками, кузовами автомобилей, панелями самолётов и другими препятствиями. Чтобы выполнять полезную работу, роботизированная рука должна переместить инструмент из одной точки в другую, не задевая ничего, при этом движение должно быть коротким, плавным и надёжным. В этом исследовании представлен новый метод планирования, который помогает роботам прокладывать чище и безопаснее траектории в загромождённых трёхмерных средах.
Почему планирование траектории имеет значение
Современное производство опирается на роботизированные руки для измерения и инспекции крупных сложных деталей, таких как кузова автомобилей, корпуса судов и обшивки самолётов. Во многих таких задачах расположение рабочей области остаётся неизменным от одного задания к другому, но рука должна многократно повторять одно и то же движение. В таких условиях гораздо ценнее обнаружить одну отличную свободную от столкновений траекторию, чем быстро найти просто приемлемый маршрут. Более короткая и плавная траектория экономит энергию, уменьшает износ сочленений и позволяет системе инспекции работать быстрее и стабильнее в длительной перспективе.
Основная идея: направлять движение на плоскость
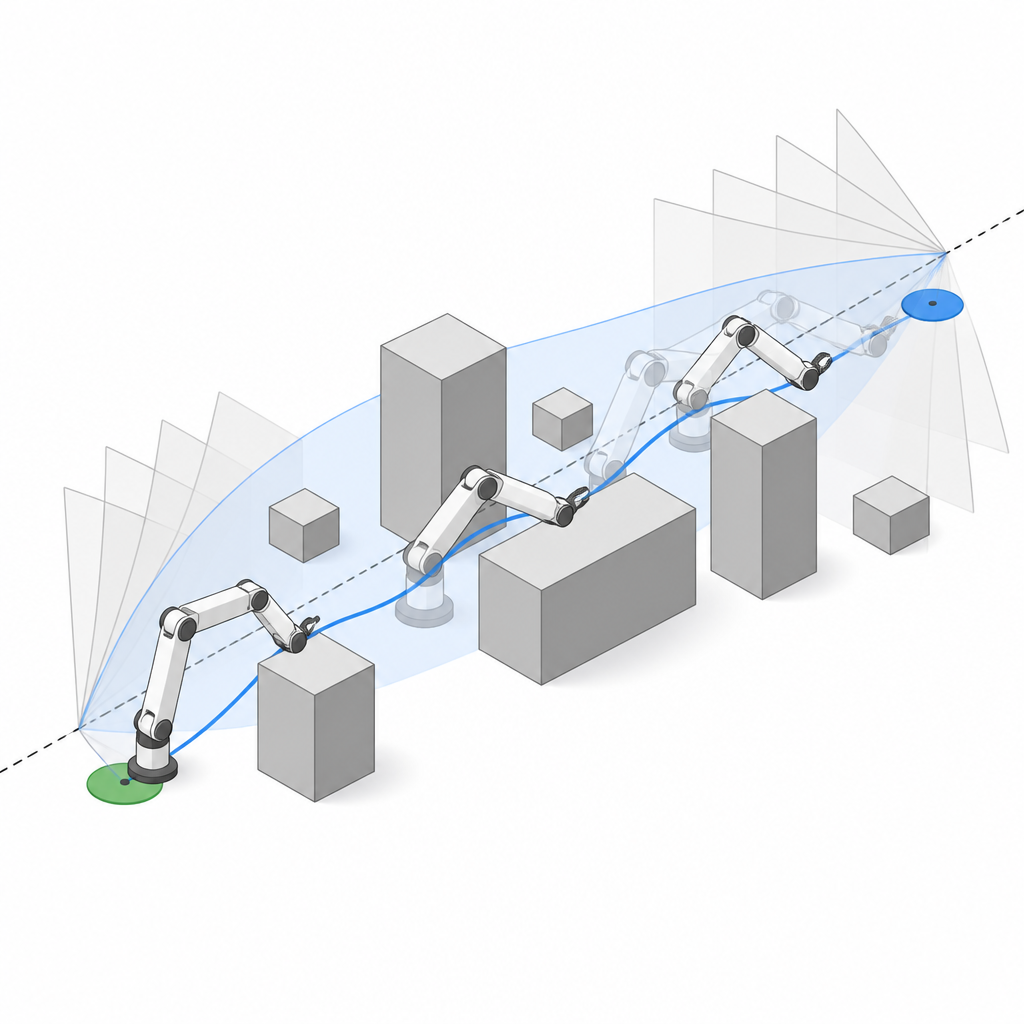
Авторы опираются на популярный метод выборки, называемый быстро исчерпывающимися случайными деревьями (rapidly exploring random trees), который обычно рассылает пробные точки по всему трёхмерному пространству, пока не наткнётся на маршрут между началом и целью. Ключевая идея состоит в ограничении этих пробных точек тщательно выбранной плоскостью, проходящей через начальную и конечную позиции робота. Вместо того чтобы позволять поиску блуждать во всех направлениях, они вращают эту плоскость как лист вокруг прямой между двумя точками, проверяя множество равномерно распределённых углов. На каждой плоскости планируют маршрут, огибающий известные препятствия, а затем оценивают его по взвешенной смеси длины пути, времени планирования и числа изгибов в траектории.
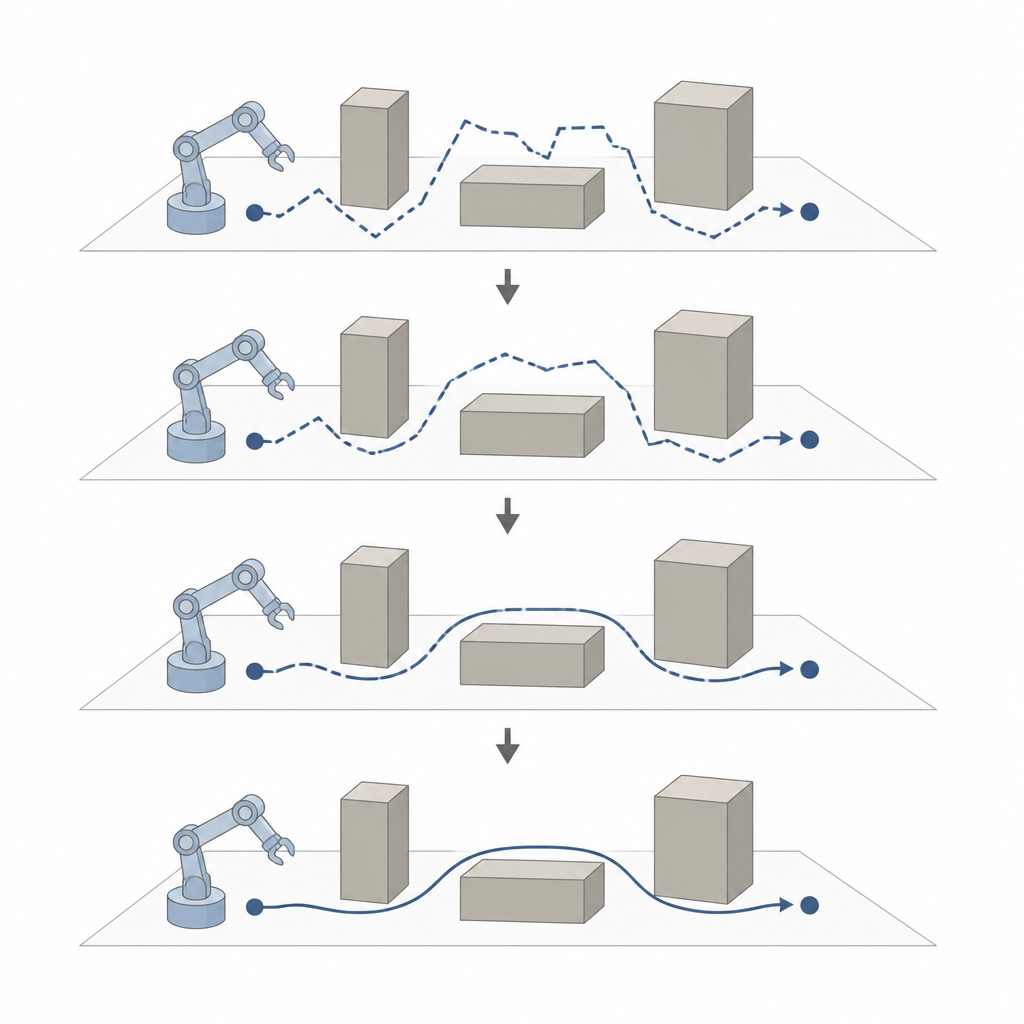
Как метод формирует и сглаживает траектории
После того как кандидатные траектории собраны с разных плоскостей, метод выбирает ту, у которой наименьший общий балл, и уточняет её. Дополнительные шаги переназначают связи между опорными точками и отсекают лишние объезды, так что дерево возможных движений постепенно сворачивается в более короткую линию. Чтобы избежать резких углов, которые заставили бы суставы робота дергаться или останавливаться, авторы затем аппроксимируют выбранный маршрут плавной кривой, задаваемой полиномом четвёртой степени. Они также сдвигают любые точки, проходящие слишком близко к препятствию, перед аппроксимацией и повторно вычисляют недостающие значения глубины, чтобы весь путь по-прежнему лежал на выбранной плоскости.
Тестирование в загромождённых виртуальных и реальных мирах
Команда испытала метод RRT* с планарным ограничением в нескольких смоделированных полях препятствий и в экспериментах с шестисуставным измерительным роботом, отслеживаемым лазерной системой. Они сравнили его с исходным методом RRT, улучшенной версией RRT* и популярным методом на основе обучения, известным как Q-learning. В разных конфигурациях препятствий их подход последовательно даёт маршруты короче и с меньшим количеством промежуточных точек, при этом также демонстрируя меньшую разбросанность от запуска к запуску. В одном наборе испытаний средняя длина пути уменьшилась более чем на треть по сравнению с классическим RRT и более чем на сорок процентов по сравнению с Q-learning, а число опорных точек сократилось примерно вдвое.
Когда планарный упрощённый подход работает, а когда нет
Идея направлять движение по плоскости не решает все задачи навигации. Трубчатые проходы или очень плотные скопления препятствий могут потребовать зигзагообразного манёвра, который ни одна плоская поверхность не сможет точно описать. Чтобы предвидеть такие случаи, авторы добавляют быструю проверку окрестности начальной и конечной точек. Если препятствия плотно окружат эти точки в пределах определённого радиуса, метод помечает сцену как маловероятно допускающую чистое планарное решение и предлагает применить более общий планировщик.
Что это значит для реальных роботизированных рук
Для многих задач инспекции и измерений с фиксированной раскладкой эта стратегия с направляющей плоскостью предлагает практическую возможность пожертвовать небольшим объёмом вычислений оффлайн ради устойчивой выгоды в повседневной работе. Направляя поиск на интеллектуально повернутую плоскость и затем сглаживая маршрут, метод помогает роботизированным рукам двигаться больше как уверенная человеческая рука, а не как нервная машина. В результате получается траектория короче, более повторяющаяся и более «щадящая» для аппаратного обеспечения, что делает точные автоматизированные измерения безопаснее и эффективнее.
Цитирование: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
Ключевые слова: планирование траектории роботизированной руки, избегание столкновений, алгоритм RRT star, инспекция на производстве, сглаживание движения робота