Clear Sky Science · es
Planificación de trayectorias para manipuladores basada en el algoritmo RRT* con restricción planar
Robots encontrando su camino en espacios reducidos
Los robots de fábrica a menudo comparten espacios de trabajo estrechos con máquinas voluminosas, carrocerías de automóviles, paneles aeronáuticos y otros obstáculos. Para realizar tareas útiles, un brazo robótico debe mover su herramienta de un punto a otro sin chocar con nada, manteniendo el movimiento corto, suave y fiable. Este estudio introduce un nuevo método de planificación que ayuda a los brazos robóticos a trazar trayectorias más limpias y seguras en entornos tridimensionales abarrotados.
Por qué importa la planificación de trayectorias
La fabricación moderna depende de brazos robóticos para medir e inspeccionar piezas grandes y complejas, como carrocerías de coches, cascos de barcos y superficies aeronáuticas. En muchos de estos trabajos, la disposición del espacio de trabajo permanece igual de una tarea a otra, pero el brazo debe repetir el mismo movimiento una y otra vez. En ese contexto, resulta mucho más valioso descubrir una trayectoria libre de colisiones excelente que encontrar una ruta meramente aceptable muy rápidamente. Una trayectoria más corta y suave ahorra energía, reduce el desgaste en las juntas y permite que el sistema de inspección funcione más rápido y con mayor consistencia a lo largo del tiempo.
La idea básica de guiar el movimiento hacia un plano
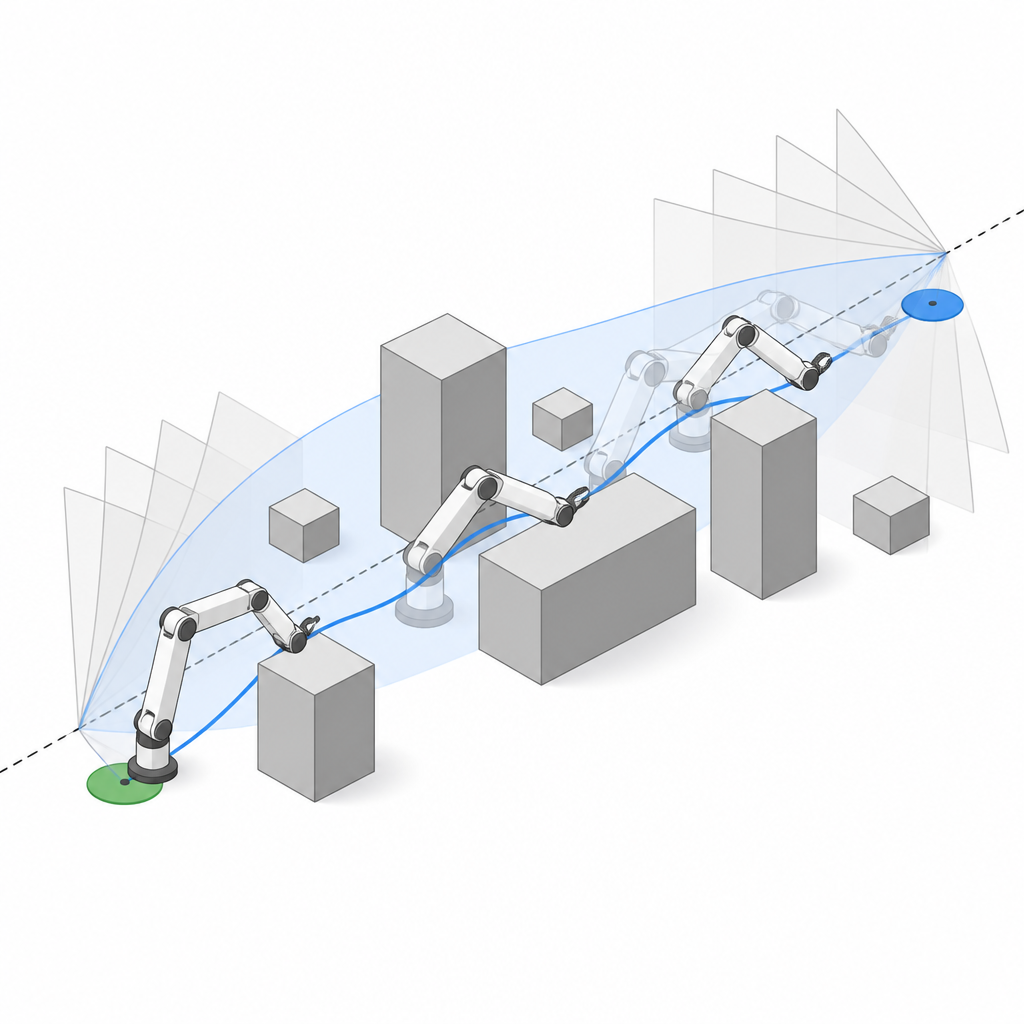
Los autores se basan en un enfoque de muestreo popular llamado árboles aleatorios de exploración rápida, que normalmente dispersa puntos de prueba por todo el espacio tridimensional hasta que da con una ruta entre el inicio y la meta. Su giro clave es confinar esos puntos de prueba a un plano cuidadosamente elegido que pasa por las posiciones de inicio y fin del robot. En lugar de dejar que la búsqueda se disperse a ciegas en todas las direcciones, rotan este plano como una lámina alrededor de la línea recta entre los dos puntos, comprobando muchos ángulos equiespaciados. En cada plano, planifican una trayectoria que rodea los obstáculos conocidos y luego la evalúan usando una mezcla ponderada de longitud de la trayectoria, tiempo de planificación y número de curvas en la ruta.
Cómo el método moldea y suaviza las trayectorias
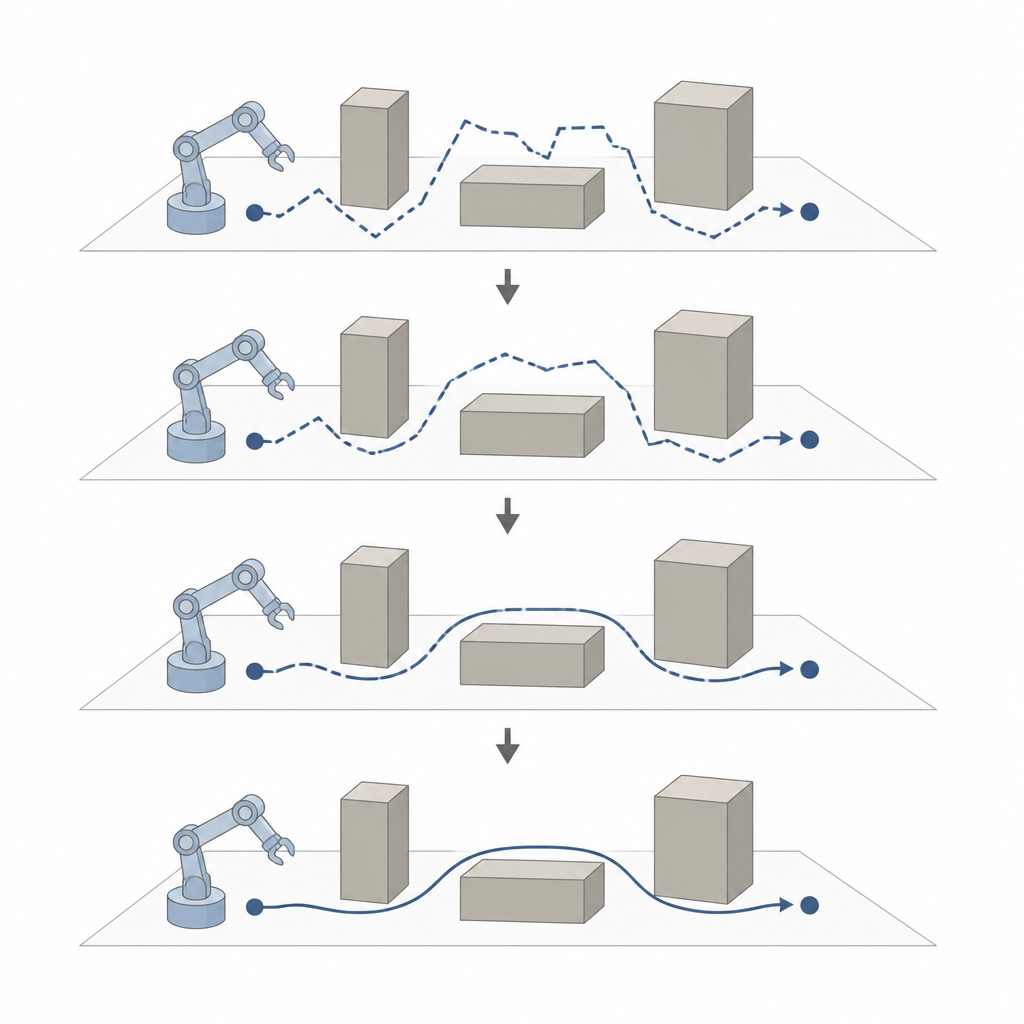
Una vez recogidas las trayectorias candidatas de los distintos planos, el método selecciona la que tiene la puntuación global más baja y la refina. Pasos adicionales reasignan las conexiones entre puntos intermedios y eliminan desvíos, de modo que el árbol de movimientos posibles se va colapsando gradualmente sobre una línea más corta. Para evitar esquinas pronunciadas que obligarían a las juntas del robot a sacudirse o detenerse, los autores ajustan la ruta elegida con una curva suave descrita por un polinomio de cuarto grado. También desplazan ligeramente cualquier punto que pase demasiado cerca de un obstáculo antes del ajuste y recalculan los valores de profundidad faltantes para que toda la trayectoria siga estando en el plano elegido.
Pruebas en mundos virtuales y reales abarrotados
El equipo pone a prueba su método RRT* con restricción planar en varios campos de obstáculos simulados y en experimentos con un robot de medición de seis articulaciones rastreado por un sistema láser. Lo comparan con el método RRT original, una versión mejorada RRT* y un método popular basado en aprendizaje llamado Q learning. En distintos arreglos de obstáculos, su enfoque produce de forma consistente rutas más cortas y con menos puntos intermedios, mostrando además menos variación entre ejecuciones. En un conjunto de pruebas, la longitud media de la trayectoria se reduce en más de un tercio frente al RRT clásico y en más del cuarenta por ciento frente a Q learning, y el número de puntos de paso se reduce aproximadamente a la mitad.
Cuándo el atajo planar funcionará y cuándo no
La idea de guiar el movimiento sobre un plano no puede resolver todos los problemas de navegación. Pasajes tipo tubería o cúmulos muy densos de obstáculos pueden obligar al robot a zigzaguear de maneras que ninguna hoja plana puede capturar. Para anticipar tales casos, los autores añaden una comprobación rápida que examina los alrededores inmediatos de los puntos de inicio y fin. Si los obstáculos rodean estrechamente estas ubicaciones dentro de cierto radio, el método marca la escena como poco probable de admitir una solución planar limpia, sugiriendo que se necesita un planificador más general.
Qué significa esto para brazos robóticos reales
Para muchas tareas de inspección y medición donde la disposición es fija, esta estrategia guiada por un plano ofrece una forma práctica de intercambiar un poco de cálculo offline por ganancias duraderas en la operación diaria. Al dirigir la búsqueda hacia un plano inteligentemente rotado y luego suavizar la ruta, el método ayuda a los brazos robóticos a moverse más como una mano humana estable que como una máquina temblorosa. El resultado es una trayectoria más corta, más repetible y menos agresiva con el hardware, lo que hace que las mediciones automatizadas precisas sean más seguras y eficientes.
Cita: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
Palabras clave: planificación de trayectorias de brazos robóticos, evitación de colisiones, algoritmo RRT estrella, inspección industrial, suavizado del movimiento robótico