Clear Sky Science · nl
Paden plannen voor manipulatoren gebaseerd op het vlakke-beperking RRT*-algoritme
Robots die hun weg vinden in krappe ruimtes
Fabrieksrobots delen vaak krappe werkruimtes met omvangrijke machines, autocarrosserieën, vliegtuigpanelen en andere obstakels. Om nuttig werk te doen, moet een robotarm zijn gereedschap van het ene punt naar het andere verplaatsen zonder ergens tegenaan te stoten, terwijl de beweging kort, vloeiend en betrouwbaar blijft. Deze studie introduceert een nieuwe planningsmethode die robotarmen helpt schonere, veiligere paden te volgen in rommelige driedimensionale omgevingen.
Waarom padplanning ertoe doet
De moderne productie vertrouwt op robotarmen om grote, complexe onderdelen te meten en te inspecteren, zoals carrosserieën, scheepsrompen en vliegtuigbeplating. In veel van deze taken blijft de indeling van de werkruimte hetzelfde van de ene taak naar de volgende, maar moet de arm dezelfde beweging keer op keer herhalen. In die situatie is het veel waardevoller om één uitstekend botsingsvrij pad te vinden dan om snel een net acceptabele route te vinden. Een korter, vloeiender pad bespaart energie, vermindert slijtage aan gewrichten en laat het inspectiesysteem langdurig sneller en consistenter draaien.
Het basisidee: beweging leiden naar een vlak
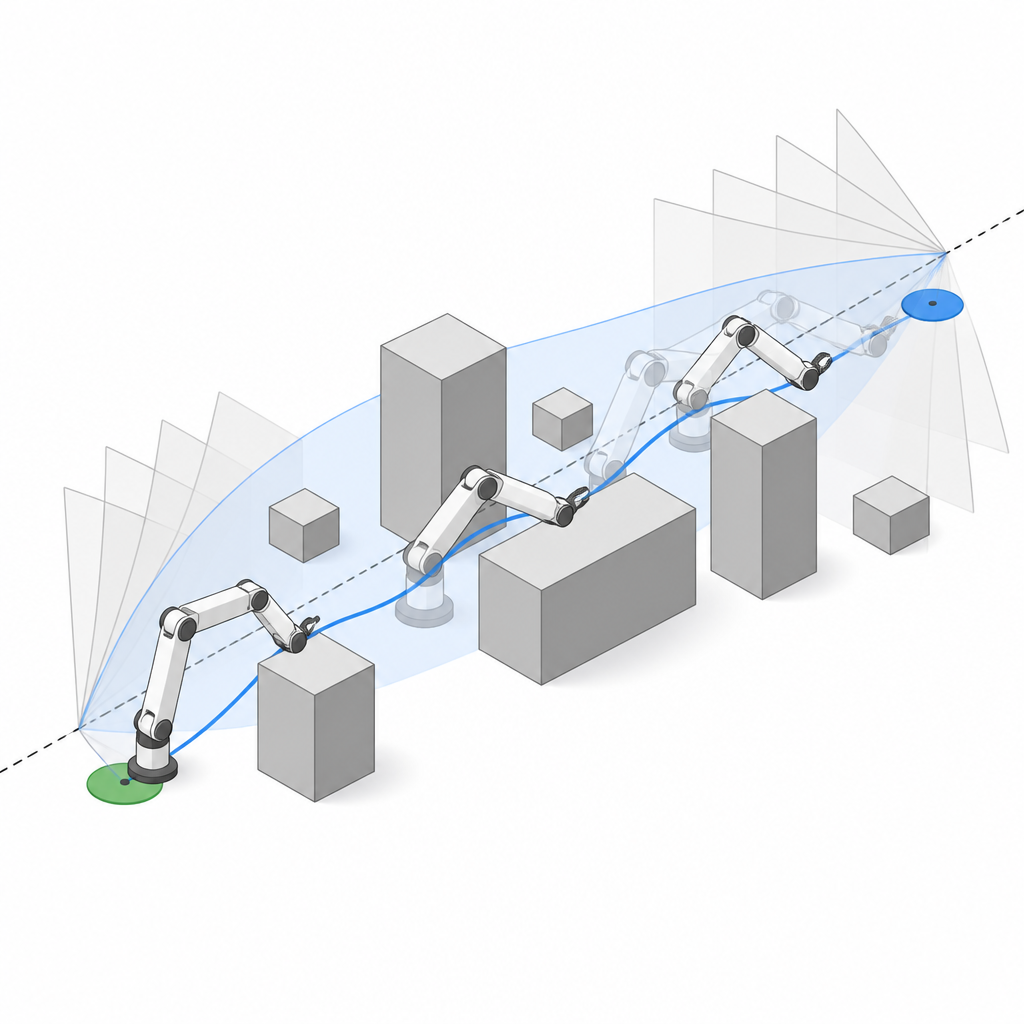
De auteurs bouwen voort op een populaire steekproefmethode genaamd rapidly exploring random trees, die gewoonlijk proefpunten door de driedimensionale ruimte verspreidt totdat het een traject tussen begin en doel vindt. Hun belangrijkste wijziging is het beperken van die proefpunten tot een zorgvuldig gekozen vlak dat door de begin- en eindposities van de robot gaat. In plaats van de zoekactie blindelings alle kanten op te laten zwerven, draaien ze dit vlak als een blad rond de rechte lijn tussen de twee punten en controleren ze veel gelijkmatig verdeelde hoeken. Op elk vlak plannen ze een pad dat bekende obstakels ontwijkt en beoordelen ze het met een gewogen mix van padlengte, plantijd en aantal knikken in de route.
Hoe de methode paden vormt en versoepelt
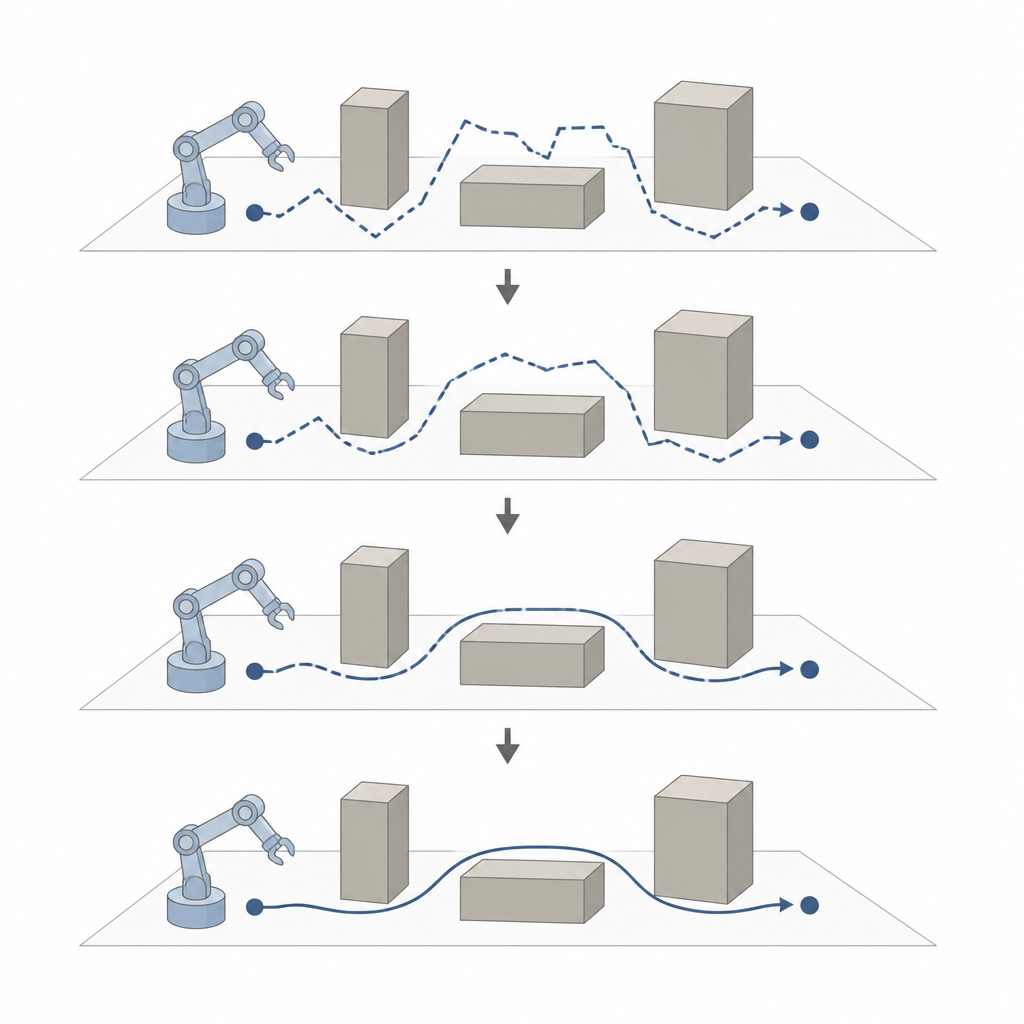
Als er kandidaatpaden van de verschillende vlakken verzameld zijn, selecteert de methode degene met de laagste totaalscore en verfijnt die. Extra stappen wijzen de verbindingen tussen waypoints opnieuw toe en snoeien omwegen weg, zodat de boom van mogelijke bewegingen geleidelijk ineenvalt tot een kortere lijn. Om scherpe hoeken te vermijden die de robotgewrichten zouden doen schokken of stoppen, passen de auteurs vervolgens een vloeiende kromme van vierde graads polynoom toe op de gekozen route. Ze verschuiven ook elk punt dat te dicht bij een obstakel komt voordat ze de kromme bepalen en herberekenen de ontbrekende dieptewaarden zodat het hele pad nog steeds op het gekozen vlak ligt.
Testen in rommelige virtuele en echte werelden
Het team zet hun vlak-beperkte RRT*-methode op de proef in meerdere gesimuleerde obstakelvelden en in experimenten met een zes-gestoorde meetrobot die gevolgd wordt door een lasersysteem. Ze vergelijken het met de oorspronkelijke RRT-methode, een verbeterde RRT*-versie en een populaire op leren gebaseerde methode genaamd Q-learning. Over verschillende obstakellay-outs levert hun aanpak consequent routes op die korter zijn en minder tussenpunten gebruiken, terwijl ze ook minder variatie tussen runs vertonen. In een reeks proeven daalt de gemiddelde padlengte met meer dan een derde vergeleken met de klassieke RRT en met meer dan veertig procent vergeleken met Q-learning, en het aantal waypoints wordt ruwweg gehalveerd.
Wanneer de vlakke snelkoppeling wel en niet werkt
Het idee om beweging op een vlak te leiden kan niet elk navigatieprobleem oplossen. Pijpvormige doorgangen of zeer dichte clusters van obstakels kunnen een robot dwingen te zigzaggen op manieren die geen enkel vlak kan vastleggen. Om dergelijke gevallen te anticiperen voegen de auteurs een snelle controle toe die de directe omgeving van begin- en eindpunt bekijkt. Als obstakels deze locaties binnen een bepaalde straal nauw omsluiten, markeert de methode de scène als onwaarschijnlijk geschikt voor een zuivere vlakoplossing en suggereert dat een algemenere planner nodig is.
Wat dit betekent voor echte robotarmen
Voor veel inspectie- en meettaken waarbij de indeling vastligt, biedt deze vlakgegeleide strategie een praktische manier om wat offline rekenwerk in te ruilen voor blijvende voordelen tijdens de dagelijkse werking. Door de zoekactie op een intelligent geroteerd vlak te sturen en vervolgens de route te verzachten, helpt de methode robotarmen meer te bewegen als een vaste menselijke hand dan als een schokkerige machine. Het resultaat is een pad dat korter, herhaalbaarder en vriendelijker voor de hardware is, waardoor nauwkeurige geautomatiseerde metingen veiliger en efficiënter worden.
Bronvermelding: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
Trefwoorden: padplanning voor robotarmen, botsingsvermijding, RRT star-algoritme, industriële inspectie, verzachting van robotbeweging