Clear Sky Science · ja
平面制約RRT*アルゴリズムに基づくマニピュレータの経路計画
狭い空間で道を見つけるロボットたち
工場のロボットはしばしば、かさばる機械や自動車のボディ、航空機のパネルなどの障害物と狭い作業領域を共有します。実用的な作業を行うには、ロボットアームは工具を一点から別の点へ移動させる際に何にもぶつからないようにしつつ、動作を短く、滑らかで信頼性のあるものに保つ必要があります。本研究は、混雑した三次元環境においてロボットアームがよりきれいで安全な経路をたどるのを助ける新しい計画手法を紹介します。
なぜ経路計画が重要か
現代の製造では、自動車の外殻や船体、航空機の外板などの大きく複雑な部品の測定や検査にロボットアームが頼られています。多くのこうした作業では作業空間の配置がタスクごとに同じままである一方で、アームは同じ動作を繰り返し実行しなければなりません。その状況では、単に許容できる経路を迅速に見つけるよりも、優れた衝突のない経路を一つ見つけることの方がはるかに価値があります。より短く滑らかな経路はエネルギーを節約し、関節の摩耗を減らし、検査システムを長期間にわたってより速く一貫して稼働させます。
運動を平面に導く基本的な考え方
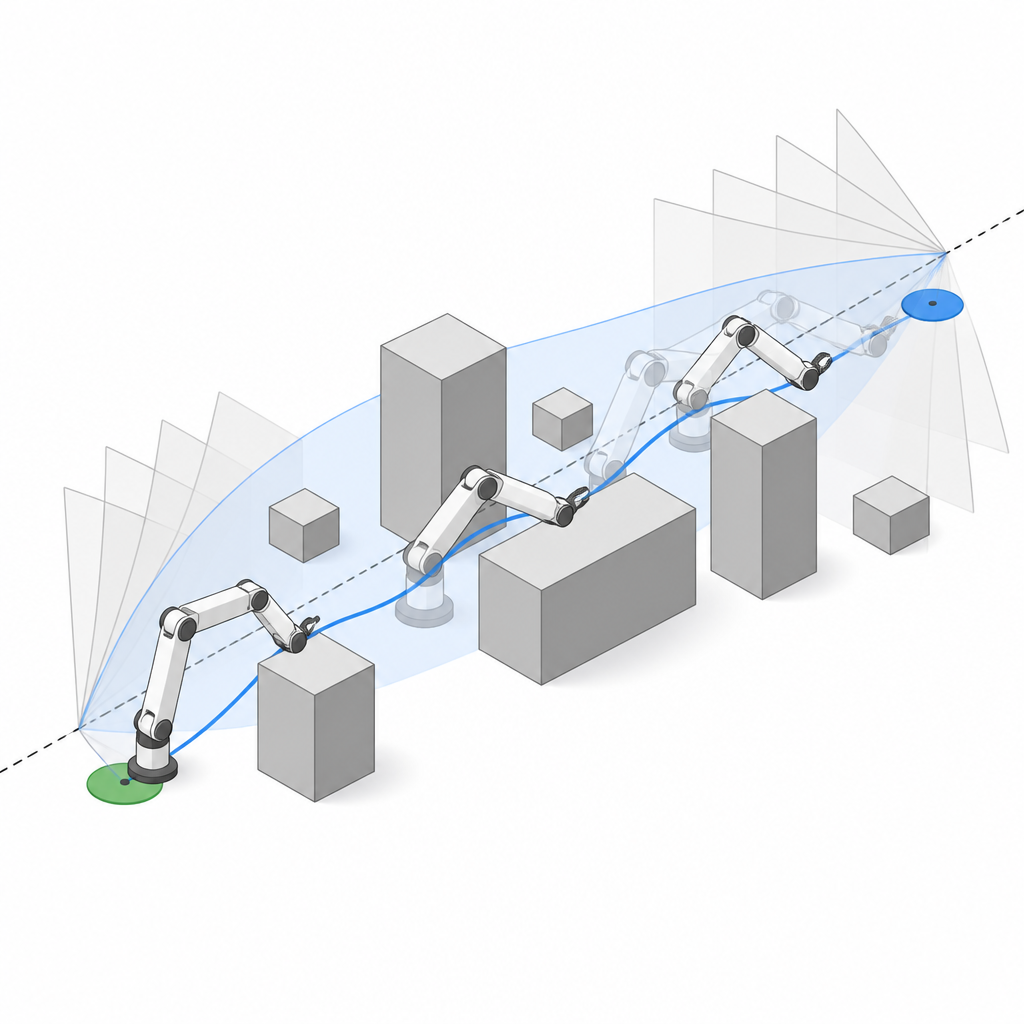
著者らは、通常は三次元空間全体に試行点をばら撒いて開始点と目標の間の経路を探索する人気のサンプリング手法、急速に探索するランダム木(RRT)を基に構築しています。彼らの主要な工夫は、これらの試行点を開始位置と終了位置を通る慎重に選んだ一つの平面に制限することです。探索を全方向に盲目的にさせる代わりに、この平面を二点間の直線のまわりで一枚のシートのように回転させ、等間隔の角度を多数チェックします。各平面上で既知の障害物を回避する経路を計画し、それを経路長、計画時間、および経路の曲がり回数の重み付け合成で評価します。
どのように経路を形成し滑らかにするか
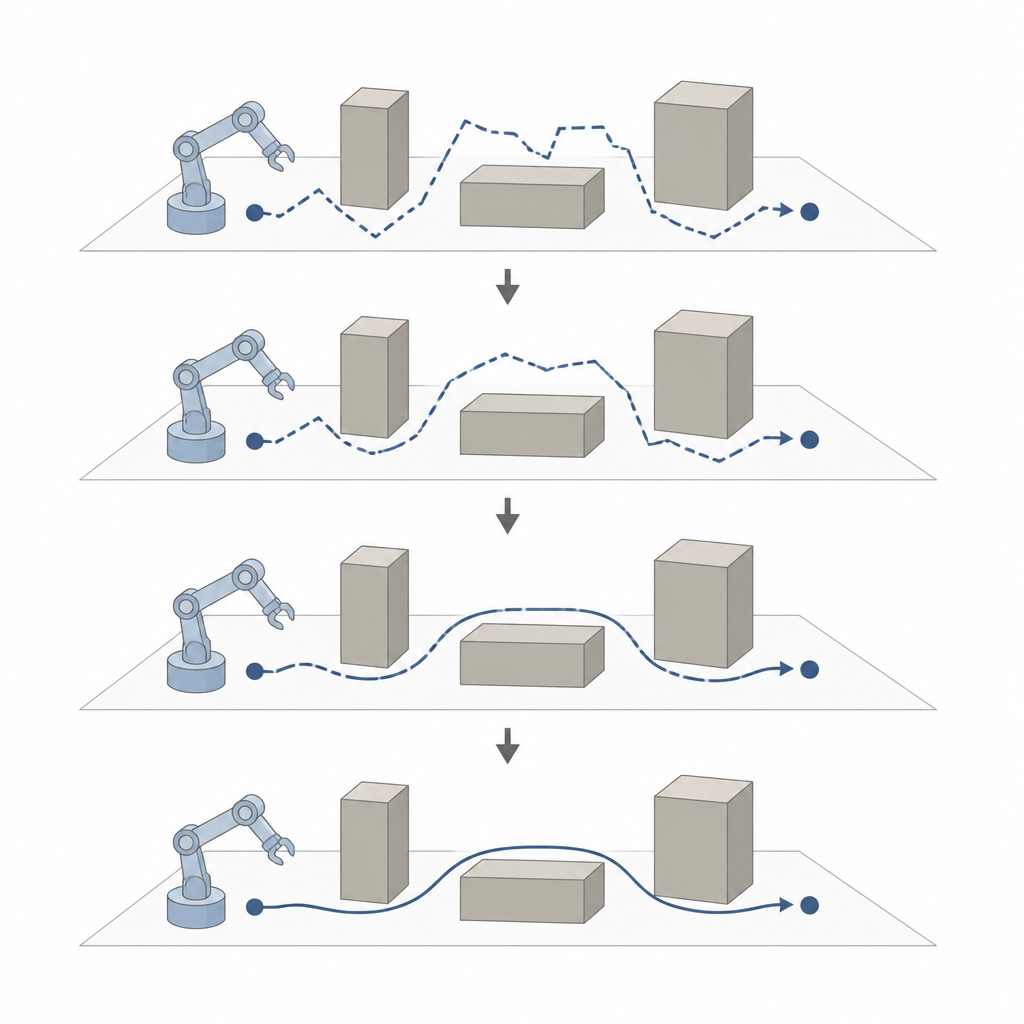
各平面から得られた候補経路が集められた後、手法は総合スコアが最も低い経路を選びそれを洗練します。追加のステップで経路点間のリンクを再割り当てし、迂回を刈り取ることで、可能な動作の木が徐々により短い線へと収束します。関節に衝撃や停止をもたらす鋭い角を避けるため、著者らは選ばれた経路に対して四次多項式で表される滑らかな曲線をフィッティングします。また、フィッティング前に障害物に近づきすぎた点をわずかに移動させ、欠落した深さの値を再計算して経路全体が選択された平面上にとどまるようにしています。
雑然とした仮想世界と実世界での試験
研究チームは、平面制約RRT*手法をいくつかのシミュレートされた障害物環境と、レーザーシステムで追跡される6自由度の計測ロボットを用いた実験で試しています。彼らはそれを従来のRRT法、改良されたRRT*バージョン、およびQラーニングと呼ばれる一般的な学習ベースの手法と比較しました。異なる障害物配置にわたって、彼らのアプローチは一貫してより短く、中間点を少なく用いる経路を生成し、かつ試行間のばらつきも小さいことを示しました。ある試験群では、平均経路長が古典的なRRTと比べて3分の1以上短くなり、Qラーニングと比べて40%以上短縮され、経路点の数はほぼ半分になりました。
平面の近道が通用する場合としない場合
運動を平面上に導くという考え方はすべてのナビゲーション問題を解けるわけではありません。パイプ状の通路や非常に密集した障害物の塊は、単一の平面では捉えきれない織りなすような動きをロボットに強いることがあります。そうしたケースを見越して、著者らは開始点と終了点の即時周囲を素早くチェックする処理を追加しました。もし一定の半径内でこれらの位置が障害物にきつく囲まれていれば、その場面はきれいな平面解を許さない可能性が高いと判定して、より一般的なプランナーが必要であることを示唆します。
実際のロボットアームにとっての意味
配置が固定された多くの検査・計測タスクにとって、この平面誘導戦略は、日常の運用における持続的な利得を得るためにオフライン計算の一部を引き受ける実用的な方法を提供します。探索を賢く回転させた平面上へ誘導し、その後経路を滑らかにすることで、この手法はロボットアームの動きを、震える機械よりも安定した人間の手に近づけます。その結果、より短く、再現性が高く、ハードウェアにやさしい経路が得られ、精密な自動測定をより安全で効率的にします。
引用: Li, M., Jiang, W., Luo, Z. et al. Path planning for manipulators based on the planar constraint RRT* algorithm. Sci Rep 16, 14784 (2026). https://doi.org/10.1038/s41598-026-44581-7
キーワード: ロボットアーム経路計画, 衝突回避, RRTスターアルゴリズム, 産業検査, ロボット動作の平滑化