Clear Sky Science · zh
用于高保真 3D 点云补全的生成对抗网络
为何填补 3D 空缺很重要
从自动驾驶汽车到家用机器人和虚拟现实,许多正在改变日常生活的技术都依赖对世界的细致 3D 认知。这些系统通常使用传感器收集空间中的数百万个点以勾勒物体和房间的轮廓。但在现实中,这类“点云”往往存在大量空缺,原因包括遮挡、反光表面或视角受限。本文提出了一种新的智能填补方法,使用一种称为生成对抗网络(GAN)的人工智能模型来重构缺失的 3D 结构,即使超过一半的数据丢失也能有效工作。
从零散点看出形状
3D 点云像是一组星群点,勾画出物体或场景的表面。激光扫描仪和深度相机使得获取此类数据变得容易,但真实测量很少是完整的。传统的修复方法依赖局部技巧,例如平滑邻近表面或在相邻点之间插值,当仅有小孔洞时这些方法效果最佳。近年的深度学习方法通过学习形状模式有所改进,但通常需要精心配对的训练样本,既包含损坏的版本也包含完整版本。这样的需求在经过筛选的研究数据集以外难以满足,并且在物体的大段区域(例如汽车车身或椅子腿)缺失时会限制性能。
教授 3D 想象力
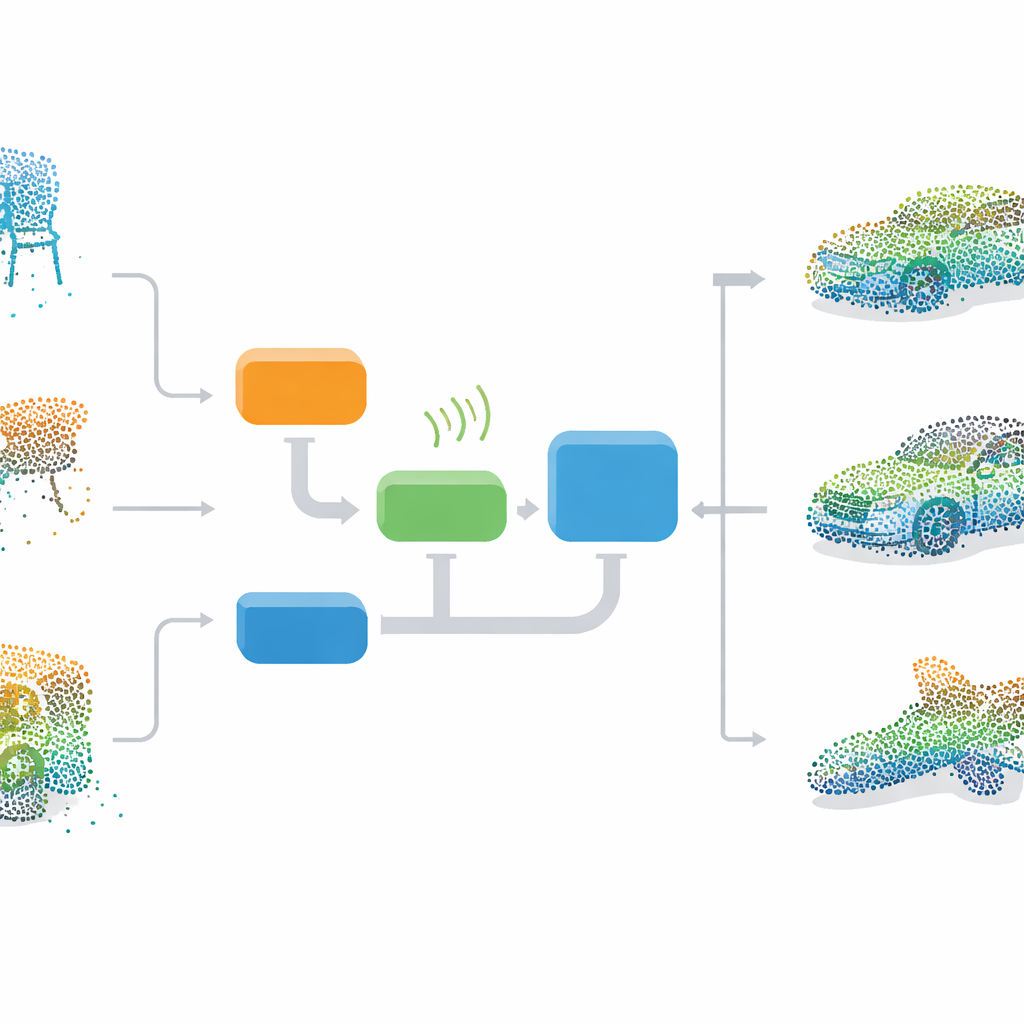
作者提出了一个端到端框架,训练神经网络从头“想象”完整的 3D 物体,然后用这种想象去修复损坏的点云。核心是一个 GAN,包含两个部分:生成器学习创建真实感的 3D 点云,而判别器学习区分真实形状和伪造形状。在训练过程中,生成器从随机噪声开始,逐步学习 ModelNet40 标准数据集中椅子、床、汽车等对象的总体分布。由于只从完整样本中学习,该方法不需要整齐匹配的缺损与完整数据对,使其在现实应用中更为实用。
系统如何填补空缺
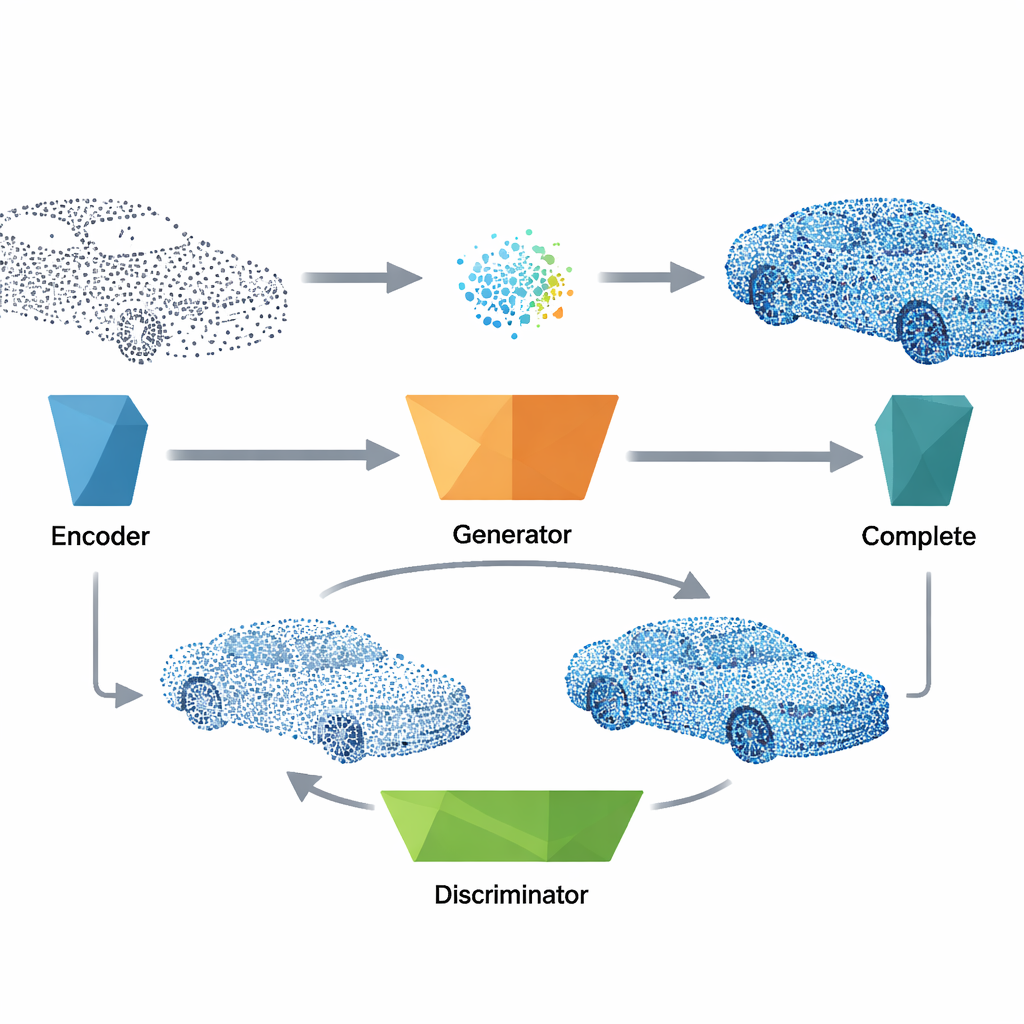
为修复破损的点云,系统首先通过一个紧凑的编码器处理不完整数据,将其整体形状提炼为一个短的特征向量。该向量扮演训练时噪声的角色,并被输入已训练的生成器,生成器产出一个合理的完整物体版本,包括几何形状和表面朝向信息。然后方法将生成的点与原始测量值融合,结合实际观测到的部分与网络对缺失部分的最佳推测。最后一步通过最近邻检测去除离群点,然后重采样使点分布均匀,得到一个整洁、均匀的 3D 模型,准备进行下游任务。
在真实感、细节与效率之间取得平衡
为了使重建既全局一致又局部平滑,作者设计了一个多部分的训练目标。除了推动生成器欺骗判别器的核心对抗信号外,他们还引入了奖励一致表面方向、生成点与真实形状良好对齐以及相邻点间自然局部间距的项。一种高效的轴对齐搜索策略使这些局部检查在处理大量点集时仍然快速。实验表明,这些损失项的组合对于稳定学习至关重要:去掉任何一项都会损害整体形状或细节表现。尽管设计复杂,最终模型仍然轻量,在现代硬件上可在不到一秒的时间内运行,使其适合近实时应用。
从实验室基准到真实场景
在 ModelNet40 基准测试上,该方法在标准误差度量上优于传统基于几何的算法和若干领先的深度学习方法。它能以更高的保真度重建汽车、椅子和床,尤其在原始点数丢失超过一半时表现突出。可视化对比显示,该方法能恢复关键结构部件——例如车顶和椅背——而这些部分常被其他方法遗漏。作者还在真实室内扫描和模拟驾驶场景中测试了系统,在这些场景中遮挡和噪声比干净数据集更为严重。在两类场景中,补全后的点云产生了更准确的 3D 地图并支持更好的路径规划:有了填补的几何信息,规划算法能预测隐藏的障碍并选择更平滑、更安全的路径。
对 3D 世界更清晰的认知
总之,这项工作表明,精心设计的 GAN 可以学习到强大的 3D 先验,并在不依赖配对训练数据的情况下补全严重损坏的点云。通过结合一个简单的编码器、一个强大的生成器、一个有辨识力的判别器以及经过深思熟虑的损失函数,系统能从稀疏且有噪声的输入中生成完整、平滑且结构健全的 3D 形状。对于非专业读者,关键信息是:算法现在能以既逼真又实用的方式“猜测”缺失的 3D 信息,帮助机器人、车辆和虚拟现实系统看到更完整的周围世界。
引用: Zhao, D., Mao, S., Shao, J. et al. Generative adversarial networks for high-fidelity 3D point cloud completion. Sci Rep 16, 14076 (2026). https://doi.org/10.1038/s41598-026-44111-5
关键词: 3D 点云, 形状补全, 生成对抗网络, 自主导航, 机器人感知