Clear Sky Science · nl
Generatieve adversariële netwerken voor hoogwaardig 3D-puntenwolkherstel
Waarom het opvullen van 3D-hiaten ertoe doet
Veel technologieën die ons dagelijks leven veranderen — van zelfrijdende auto’s tot huishoudrobots en virtual reality — zijn afhankelijk van een gedetailleerd 3D-beeld van de omgeving. Deze systemen gebruiken vaak sensoren die miljoenen punten in de ruimte verzamelen om objecten en ruimtes te omlijnen. In de praktijk zijn zulke "puntenwolken" echter vol gaten door occlusies, glanzende oppervlakken of beperkte gezichtshoeken. Dit artikel presenteert een nieuwe manier om die gaten intelligent op te vullen, met een type kunstmatige intelligentie dat een generatief adversariëel netwerk (GAN) heet, zodat ontbrekende 3D-structuren worden herbouwd zelfs wanneer meer dan de helft van de data ontbreekt.
Vormen zien tussen verspreide stippen
Een 3D-puntenwolk is als een sterrenbeeld van stippen dat het oppervlak van een object of scène schetst. Laserscanners en dieptecamera’s maken het eenvoudig om zulke gegevens vast te leggen, maar metingen uit de echte wereld zijn zelden compleet. Traditionele herstelmethoden vertrouwen op lokale technieken, zoals het gladstrijken van nabije oppervlakken of interpolatie tussen aangrenzende punten, en werken het beste bij kleine gaten. Nieuwere deep-learningmethoden verbeteren dit door vormpatronen te leren, maar ze hebben meestal zorgvuldig samengestelde trainingsparen nodig die zowel de beschadigde als de volledige versie van elk object tonen. Aan die eis is in niet-gecontroleerde omgevingen moeilijk te voldoen, en het beperkt de prestaties wanneer hele delen van een object — zoals de carrosserie van een auto of de poten van een stoel — ontbreken.
Een 3D-verbeelding aanleren
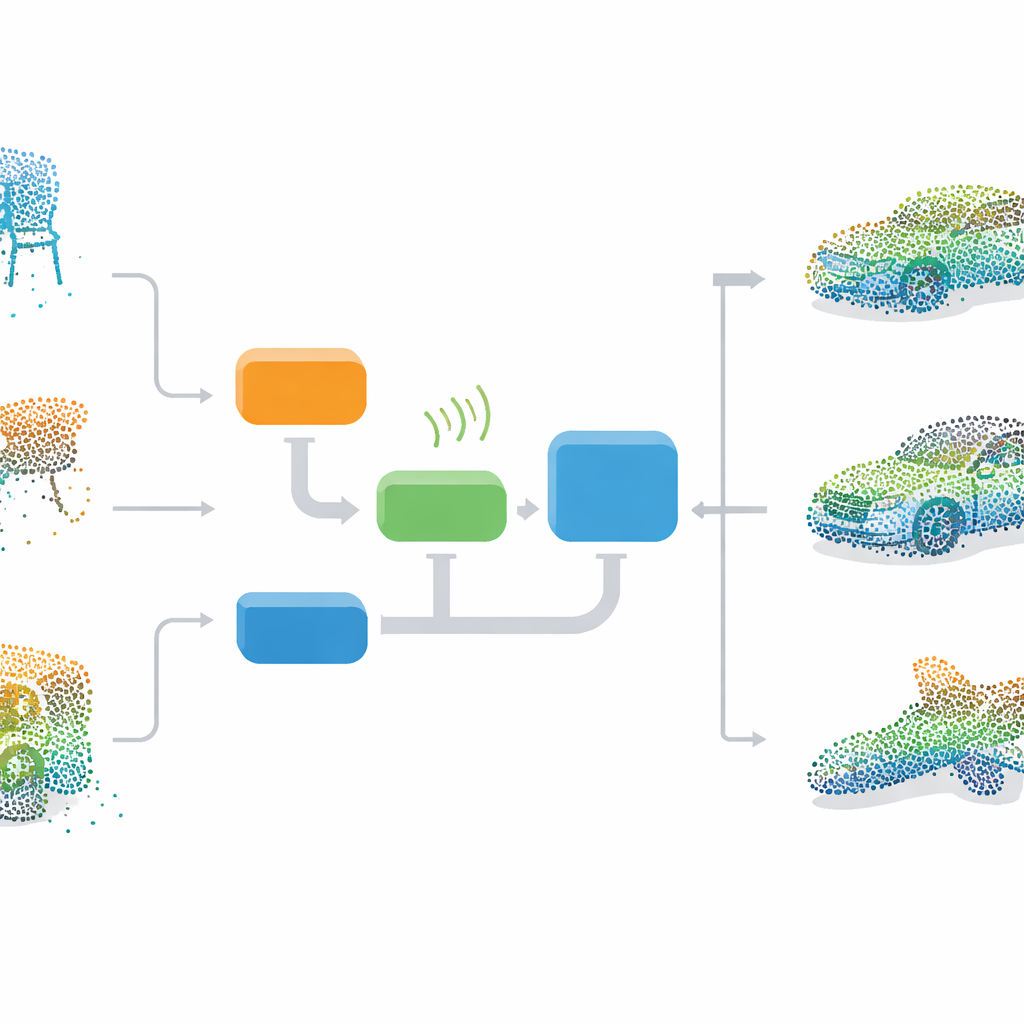
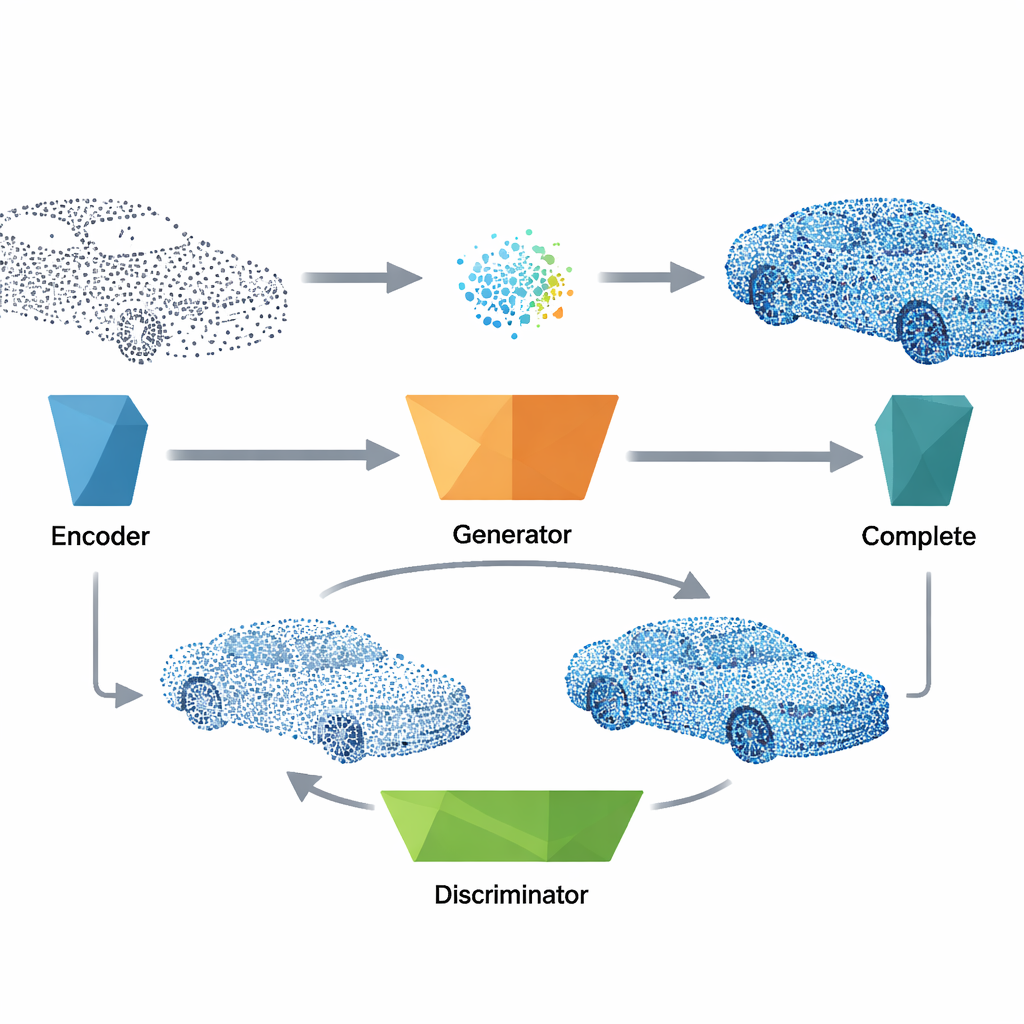
De auteurs stellen een end-to-end raamwerk voor dat een neurale netwerk leert om complete 3D-objecten vanuit het niets te "verbeelden", en die verbeelding vervolgens gebruikt om beschadigde puntenwolken te repareren. Centraal staat een GAN, een model met twee onderdelen waarbij een generator leert realistische 3D-puntenwolken te maken en een discriminator leert echte vormen van nep te onderscheiden. Tijdens training start de generator vanuit willekeurige ruis en leert geleidelijk de algemene distributies van stoelen, bedden, auto’s en andere objecten in een standaarddataset genaamd ModelNet40. Omdat het alleen van volledige voorbeelden leert, heeft de methode geen keurig gekoppelde paren van incomplete en complete data nodig, wat praktischer is voor gebruik in de echte wereld.
Hoe het systeem de gaten opvult
Om een gebroken puntenwolk te repareren, voert het systeem eerst de incomplete data door een compacte encoder die de globale vorm samenvat in een korte featurevector. Deze vector vervult dezelfde rol als de ruis tijdens training en wordt gevoed aan de getrainde generator, die een plausibele complete versie van het object produceert, inclusief geometrie en informatie over oppervlakteoriëntatie. De methode voegt vervolgens de gegenereerde punten samen met de originele metingen, waarbij geobserveerde informatie wordt gecombineerd met de beste gok van het netwerk voor de ontbrekende delen. Een laatste opruimstap verwijdert uitlierpunten met een nearest-neighbor-controle en herstelt daarna de sampling zodat de stippen gelijkmatig verdeeld zijn, wat resulteert in een nette, uniforme 3D-variant klaar voor vervolggebruik.
Realiteit, detail en efficiëntie in balans
Om de reconstructies zowel globaal coherent als lokaal glad te maken, ontwerpen de auteurs een meerledige trainingsdoelstelling. Naast het kern-adversariële signaal dat de generator ertoe brengt de discriminator te misleiden, introduceren ze termen die consistente oppervlaktrichtingen belonen, goede uitlijning van gegenereerde punten met echte vormen en natuurlijke lokale afstanden tussen naburige punten. Een efficiënte assengecentreerde zoekstrategie houdt deze lokale controles snel, zelfs voor grote puntensets. Experimenten tonen aan dat deze combinatie van verliezen cruciaal is voor stabiel leren: het weglaten van een van de termen schaadt ofwel de algehele vorm of de fijne details. Ondanks deze verfijning is het uiteindelijke model lichtgewicht en draait het in fracties van een seconde op moderne hardware, wat het geschikt maakt voor bijna realtime toepassingen.
Van laboratoriumbenchmarks naar echte scènes
Op de ModelNet40-benchmark overtreft de voorgestelde aanpak zowel klassieke geometriegebaseerde algoritmen als meerdere toonaangevende deep-learningmethoden op gangbare foutmaten. Het reconstrueert auto’s, stoelen en bedden met hogere fideliteit, vooral wanneer meer dan de helft van de oorspronkelijke punten ontbreekt. Visuele vergelijkingen laten zien dat de methode belangrijke structurele componenten herstelt — zoals autodaken en rugleuningen van stoelen — die andere methoden vaak missen. De auteurs testen het systeem ook op echte binnenscans en gesimuleerde rijomgevingen, waar occlusies en ruis veel ernstiger zijn dan in schone datasets. In beide gevallen leveren de aangevulde puntenwolken nauwkeurigere 3D-kaarten en ondersteunen ze betere routeplanning: met de aangevulde geometrie kunnen planningsalgoritmen verborgen obstakels voorspellen en vloeiendere, veiligere routes kiezen.
Een helderder beeld van 3D-werelden
Samengevat laat dit werk zien dat een zorgvuldig ontworpen GAN een sterke 3D-prior kan leren en gebruiken om zwaar beschadigde puntenwolken te completeren zonder afhankelijk te zijn van gepaarde trainingsdata. Door een eenvoudige encoder, een krachtige generator, een kritische discriminator en een doordacht samengestelde verliesfunctie te combineren, produceert het systeem complete, gladde en structureel consistente 3D-vormen uit spaarzame en lawaaierige input. Voor niet-experts is de kernboodschap dat algoritmen nu ontbrekende 3D-informatie op een manier kunnen "raadplegen" die zowel realistisch als praktisch is, waardoor robots, voertuigen en virtual-realitysystemen een completer beeld van hun omgeving krijgen.
Bronvermelding: Zhao, D., Mao, S., Shao, J. et al. Generative adversarial networks for high-fidelity 3D point cloud completion. Sci Rep 16, 14076 (2026). https://doi.org/10.1038/s41598-026-44111-5
Trefwoorden: 3D-puntenwolken, vormherstel, generatieve adversariële netwerken, autonome navigatie, robotwaarneming