Clear Sky Science · ja
高忠実度3D点群補完のための敵対的生成ネットワーク
3Dの隙間を埋めることが重要な理由
自動運転車や家庭用ロボット、バーチャルリアリティなど、日常を変える多くの技術は世界の詳細な3D理解に依存しています。これらのシステムはしばしば物体や部屋の輪郭を描くために何百万もの空間点を収集します。しかし実際には、遮蔽や光沢面、制限された視点のためにこうした「点群」は隙間だらけになります。本論文は、敵対的生成ネットワーク(GAN)と呼ばれる一種の人工知能を用いて、データの半分以上が失われているような場合でも欠損した3D構造を再構築する、賢い補完手法を提示します。
散らばった点から形状を知る
3D点群は、物体やシーンの表面を描く点の星座のようなものです。レーザースキャナや深度カメラによりこうしたデータは簡単に取得できますが、現実の計測はめったに完全ではありません。従来の修復手法は近傍の表面を平滑化したり隣接点間を補間したりするローカルな工夫に頼り、穴が小さい場合に最も効果を発揮します。近年の深層学習手法は形状パターンを学習することで改善を示していますが、多くは欠損あり・欠損なしの対応する学習ペアを必要とします。この要件は研究用に整備されたデータセット以外では満たしにくく、車体や椅子の脚のような領域全体が欠けている場合には性能が制限されます。
3Dを想像させる学習
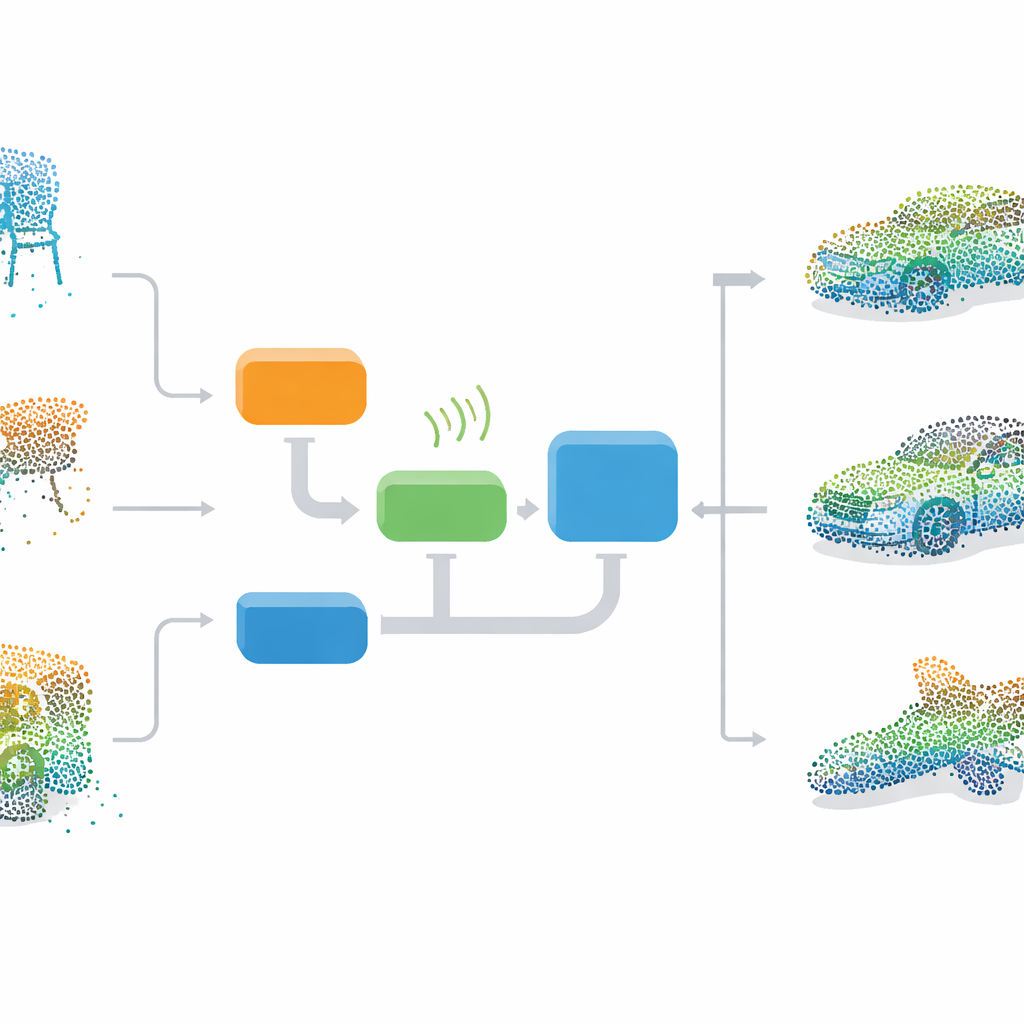
著者らは、ニューラルネットワークに完全な3D物体を一から想像させ、その想像を使って損傷した点群を修復するエンドツーエンドのフレームワークを提案します。中核にはGANがあり、生成器はリアルな3D点群を作ることを学び、識別器は本物の形状と偽物を見分けることを学びます。訓練時、生成器はランダムノイズから始まり、ModelNet40という標準データセットに含まれる椅子、ベッド、車などの全体的な分布を徐々に学習します。完全な例だけから学ぶため、本手法は整列した欠損・完全データの対を必要とせず、実世界での応用により実用的です。
システムが隙間を埋める仕組み
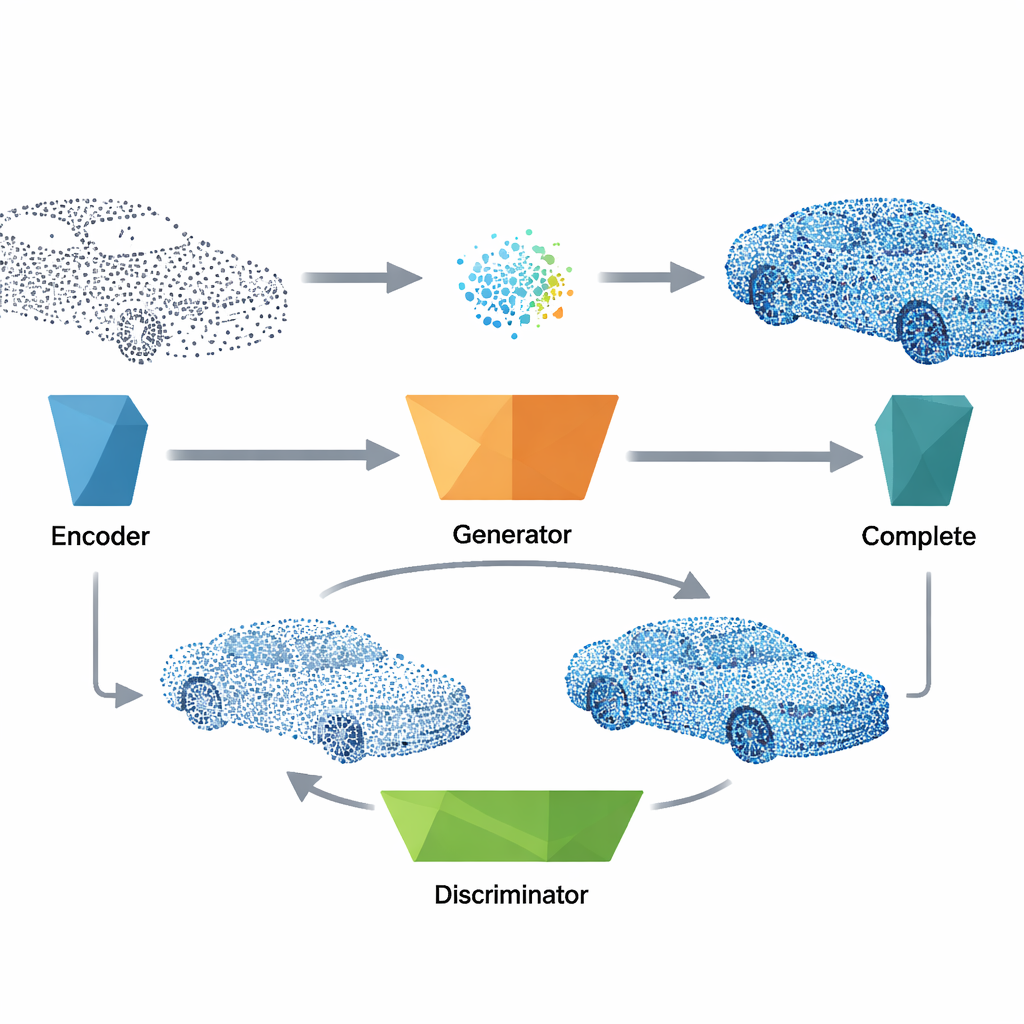
損傷した点群を修復する際、システムはまず簡潔なエンコーダに未完成のデータを通し、その全体形状を短い特徴ベクトルに蒸留します。このベクトルは訓練時に用いたノイズと同じ役割を果たし、訓練済みの生成器に入力されると、幾何学的形状や表面向きの情報を含むもっともらしい完全版の物体を生成します。続いて生成された点と元の観測点を融合し、実際に観測された部分とネットワークが推測した欠損部分を組み合わせます。最後のクリーンアップ段階では最近傍チェックで外れ点を除去し、点が均等に広がるように再サンプリングして、下流タスクに使える整った均一な3Dモデルを得ます。
リアリティ、細部、効率のバランス
再構成を大局的に一貫性があり局所的に滑らかにするために、著者らは多部構成の訓練目的を設計しています。生成器に識別器を騙すよう促す基本的な敵対損失に加え、表面方向の一貫性、生成点と実際の形状の良好な整合、隣接点間の自然な局所間隔を評価する項を導入しています。効率的な軸整列探索戦略により、これらの局所チェックは大規模点群でも高速に保たれます。実験は、これらの損失の組み合わせが安定した学習に不可欠であることを示しています:どれか一つを取り除くと全体の形や細部のいずれかが損なわれます。それにもかかわらず、最終モデルは軽量であり、最新ハードウェア上で数分の一秒で動作し、準リアルタイム用途に適しています。
研究ベンチマークから現実のシーンへ
ModelNet40ベンチマーク上で、本手法は従来の幾何ベースのアルゴリズムや幾つかの主要な深層学習手法を標準的な誤差指標で上回ります。特に元の点の半分以上が失われている場合に、車、椅子、ベッドをより高忠実度で再構成します。視覚比較では、他手法が見落としがちな車の屋根や椅子の背もたれといった主要な構造部を復元していることが明らかです。著者らはまた、屋内実スキャンやシミュレートされた走行シーンでもシステムを試し、遮蔽やノイズがクリーンなデータセットよりはるかに厳しい状況であっても、補完された点群がより正確な3Dマップを生み、経路計画を改善することを示しました。補完された幾何情報によって、計画アルゴリズムは隠れた障害物を予測し、より滑らかで安全なルートを選べます。
3D世界のより明瞭な像
まとめると、本研究は、入念に設計されたGANが強力な3D事前分布を学び、対応する学習データを必要とせずに大きく損傷した点群を補完できることを示しています。単純なエンコーダ、強力な生成器、識別力のある識別器、そして考え抜かれた損失関数を組み合わせることで、希薄でノイズの多い入力から完全で滑らか、構造的に妥当な3D形状を生成します。専門外の方への主要メッセージは、アルゴリズムがもはや欠損した3D情報を現実的かつ実用的な形で“推測”できるようになり、ロボットや車両、バーチャルリアリティが周囲の世界をより完全に把握できるようになったという点です。
引用: Zhao, D., Mao, S., Shao, J. et al. Generative adversarial networks for high-fidelity 3D point cloud completion. Sci Rep 16, 14076 (2026). https://doi.org/10.1038/s41598-026-44111-5
キーワード: 3D点群, 形状補完, 敵対的生成ネットワーク, 自律航行, ロボット知覚