Clear Sky Science · it
Reti antagoniste generative per il completamento ad alta fedeltà di nuvole di punti 3D
Perché riempire i buchi 3D è importante
Molte delle tecnologie che stanno trasformando la vita quotidiana — dalle auto a guida autonoma ai robot domestici e alla realtà virtuale — si basano su una comprensione 3D dettagliata del mondo. Questi sistemi spesso usano sensori che raccolgono milioni di punti nello spazio per delineare oggetti e ambienti. Ma nella pratica tali “nuvole di punti” sono piene di lacune a causa di occlusioni, superfici lucide o punti di vista limitati. Questo articolo propone un nuovo metodo per riempire in modo intelligente quei vuoti, sfruttando un tipo di intelligenza artificiale chiamato rete antagonista generativa (GAN) per ricostruire strutture 3D mancanti anche quando più della metà dei dati è assente.
Vedere le forme da punti sparsi
Una nuvola di punti 3D è come una costellazione di punti che abbozza la superficie di un oggetto o di una scena. Scanner laser e camere di profondità hanno reso facile catturare questo tipo di dati, ma le misure reali raramente sono complete. I metodi tradizionali di riparazione si basano su stratagemmi locali, come lisciare le superfici vicine o interpolare tra punti adiacenti, e funzionano meglio quando sono presenti solo piccoli buchi. Metodi più recenti di deep learning migliorano imparando modelli di forma, ma di solito richiedono coppie di addestramento accuratamente preparate che mostrino sia la versione danneggiata sia quella completa di ogni oggetto. Questo requisito è difficile da soddisfare al di fuori di dataset curati per la ricerca e limita le prestazioni quando mancano intere sezioni di un oggetto — come la carrozzeria di un’auto o le gambe di una sedia.
Insegnare un’immaginazione 3D
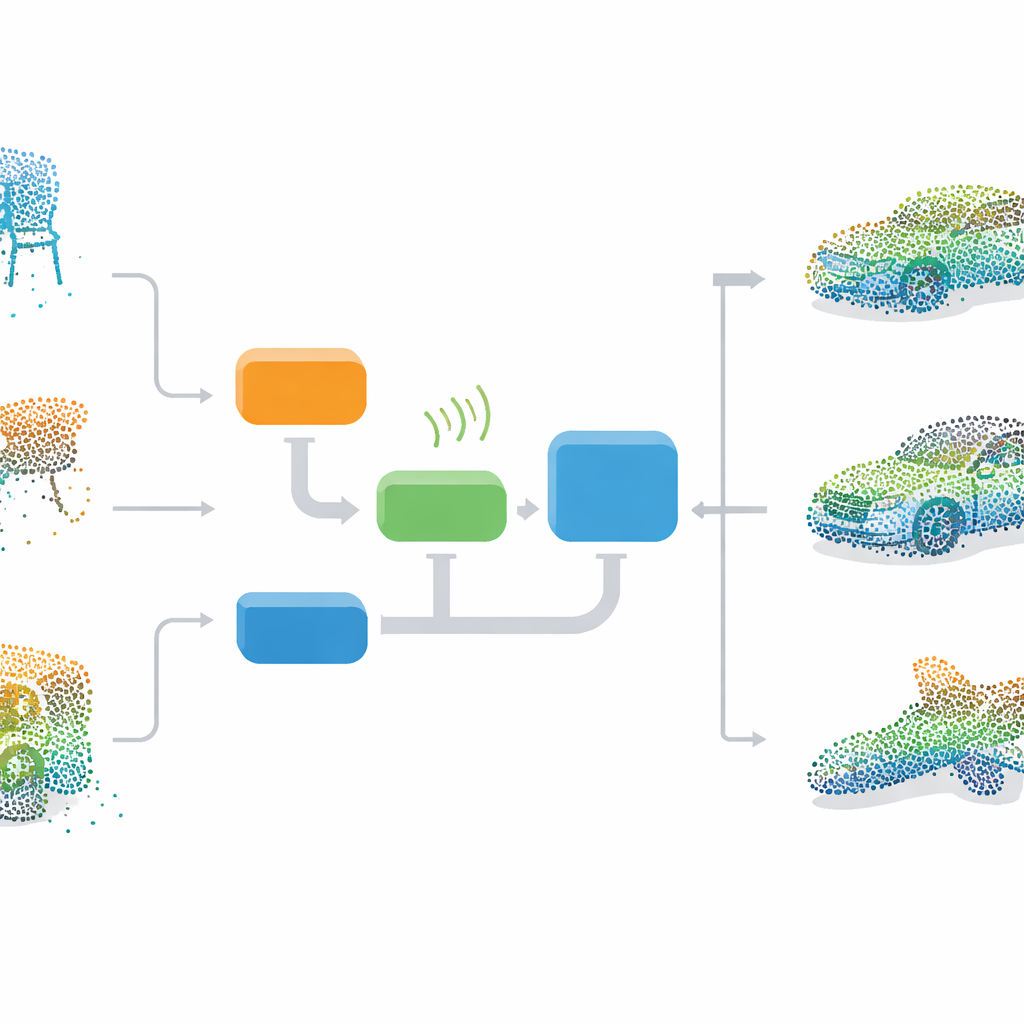
Gli autori propongono un framework end-to-end che insegna a una rete neurale a immaginare oggetti 3D completi da zero, per poi usare quell’immaginazione per riparare nuvole di punti danneggiate. Al centro c’è una GAN, un modello in due parti in cui un generatore impara a creare nuvole di punti 3D realistiche mentre un discriminatore impara a distinguere forme reali da falsi. Durante l’addestramento, il generatore parte da rumore casuale e impara gradualmente le distribuzioni generali di sedie, letti, automobili e altri oggetti in un dataset standard chiamato ModelNet40. Poiché apprende solo da esempi completi, il metodo non ha bisogno di coppie ordinate di dati incompleti e completi, rendendolo più pratico per l’uso nel mondo reale.
Come il sistema riempie i vuoti
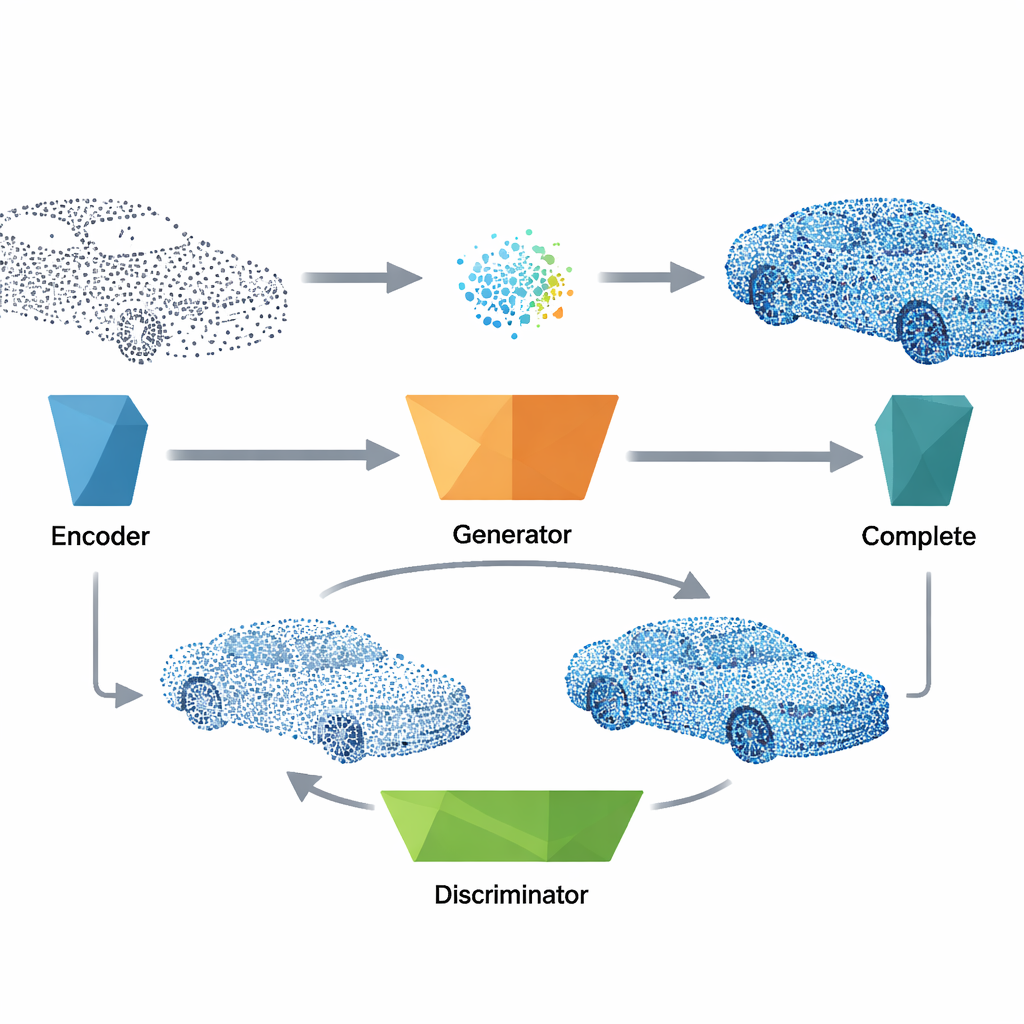
Per riparare una nuvola di punti incompleta, il sistema passa prima i dati parziali attraverso un encoder compatto che distilla la forma generale in un breve vettore di caratteristiche. Questo vettore svolge lo stesso ruolo del rumore usato durante l’addestramento ed è fornito al generatore addestrato, che produce una versione completa plausibile dell’oggetto, comprensiva di geometria e informazioni sull’orientamento della superficie. Il metodo poi fonde i punti generati con le misure originali, combinando ciò che è stato effettivamente osservato con la miglior ipotesi della rete per le parti mancanti. Un passaggio finale di pulizia rimuove punti anomali mediante un controllo dei vicini più prossimi e poi risampiona il risultato in modo che i punti siano distribuiti in modo uniforme, ottenendo un modello 3D ordinato e omogeneo pronto per attività successive.
Bilanciare realismo, dettaglio ed efficienza
Per rendere le ricostruzioni sia coerenti a livello globale sia lisce a livello locale, gli autori progettano un obiettivo di addestramento composto da più parti. Oltre al segnale antagonista di base che spinge il generatore a ingannare il discriminatore, introducono termini che premiano la coerenza delle direzioni della superficie, un buon allineamento dei punti generati con le forme reali e una spaziatura locale naturale tra punti vicini. Una strategia di ricerca efficiente allineata agli assi mantiene veloci questi controlli locali anche per insiemi di punti di grandi dimensioni. Gli esperimenti mostrano che questa combinazione di perdite è cruciale per un apprendimento stabile: rimuovere anche una sola di esse danneggia o la forma complessiva o i dettagli fini. Nonostante questa sofisticazione, il modello finale è leggero, funzionando in frazioni di secondo su hardware moderno, il che lo rende adatto ad applicazioni quasi in tempo reale.
Dal benchmark di laboratorio alle scene reali
Sul benchmark ModelNet40, l’approccio proposto supera sia gli algoritmi classici basati sulla geometria sia diversi metodi di deep learning all’avanguardia su misure di errore standard. Ricostruisce automobili, sedie e letti con maggiore fedeltà, specialmente quando più della metà dei punti originali manca. Le comparazioni visive rivelano che il metodo ripristina componenti strutturali chiave — come i tetti delle auto e gli schienali delle sedie — che altri metodi spesso perdono. Gli autori testano inoltre il sistema su scansioni indoor reali e scene di guida simulate, dove occlusioni e rumore sono molto più severi che nei dataset puliti. In entrambi i contesti, le nuvole di punti completate producono mappe 3D più accurate e supportano una migliore pianificazione del percorso: con la geometria riempita, gli algoritmi di pianificazione possono prevedere ostacoli nascosti e scegliere rotte più fluide e sicure.
Un’immagine più chiara dei mondi 3D
In sintesi, questo lavoro mostra che una GAN progettata con cura può apprendere un forte prior 3D e usarlo per completare nuvole di punti fortemente danneggiate senza fare affidamento su dati di addestramento accoppiati. Combinando un encoder semplice, un generatore potente, un discriminatore perspicace e una funzione di perdita pensata con attenzione, il sistema produce forme 3D complete, lisce e strutturalmente solide a partire da input sparsi e rumorosi. Per i non esperti, il messaggio chiave è che gli algoritmi oggi possono “indovinare” informazioni 3D mancanti in modo realistico e pratico, aiutando robot, veicoli e sistemi di realtà virtuale a vedere un quadro più completo del mondo circostante.
Citazione: Zhao, D., Mao, S., Shao, J. et al. Generative adversarial networks for high-fidelity 3D point cloud completion. Sci Rep 16, 14076 (2026). https://doi.org/10.1038/s41598-026-44111-5
Parole chiave: nuvole di punti 3D, completamento delle forme, reti antagoniste generative, navigazione autonoma, percezione robotica