Clear Sky Science · pl
Sieci generatywno‑rywalizacyjne do wysokiej jakości uzupełniania chmur punktów 3D
Dlaczego wypełnianie luk w 3D ma znaczenie
Wiele technologii zmieniających codzienne życie — od pojazdów autonomicznych po roboty domowe i wirtualną rzeczywistość — opiera się na szczegółowym, trójwymiarowym rozumieniu świata. Systemy te często korzystają z czujników rejestrujących miliony punktów w przestrzeni, by nakreślić kształty obiektów i pomieszczeń. W praktyce takie „chmury punktów” są jednak pełne ubytków spowodowanych przeszkodami, błyszczącymi powierzchniami czy ograniczonymi punktami widzenia. Artykuł przedstawia nową metodę inteligentnego wypełniania tych luk, wykorzystującą rodzaj sztucznej inteligencji nazywany siecią generatywno‑rywalizacyjną (GAN) do rekonstruowania brakujących struktur 3D nawet wtedy, gdy więcej niż połowa danych jest utracona.
Odczytywanie kształtów z rozsianych kropek
Chmura punktów 3D przypomina konstelację kropek szkicujących powierzchnię obiektu lub sceny. Skanery laserowe i kamery głębi ułatwiły przechwytywanie takich danych, ale pomiary w warunkach rzeczywistych rzadko bywają kompletne. Tradycyjne metody naprawcze opierają się na lokalnych zabiegach, takich jak wygładzanie sąsiednich powierzchni czy interpolacja między punktami, i najlepiej działają przy niewielkich dziurach. Nowsze metody uczenia głębokiego poprawiają to, ucząc się wzorców kształtów, ale zwykle wymagają starannie przygotowanych par treningowych pokazujących zarówno uszkodzoną, jak i w pełni zachowaną wersję każdego obiektu. Tego rodzaju wymóg trudno spełnić poza wyselekcjonowanymi zestawami badawczymi, a także ogranicza wydajność, gdy brakują całe fragmenty obiektu — na przykład karoseria samochodu czy nogi krzesła.
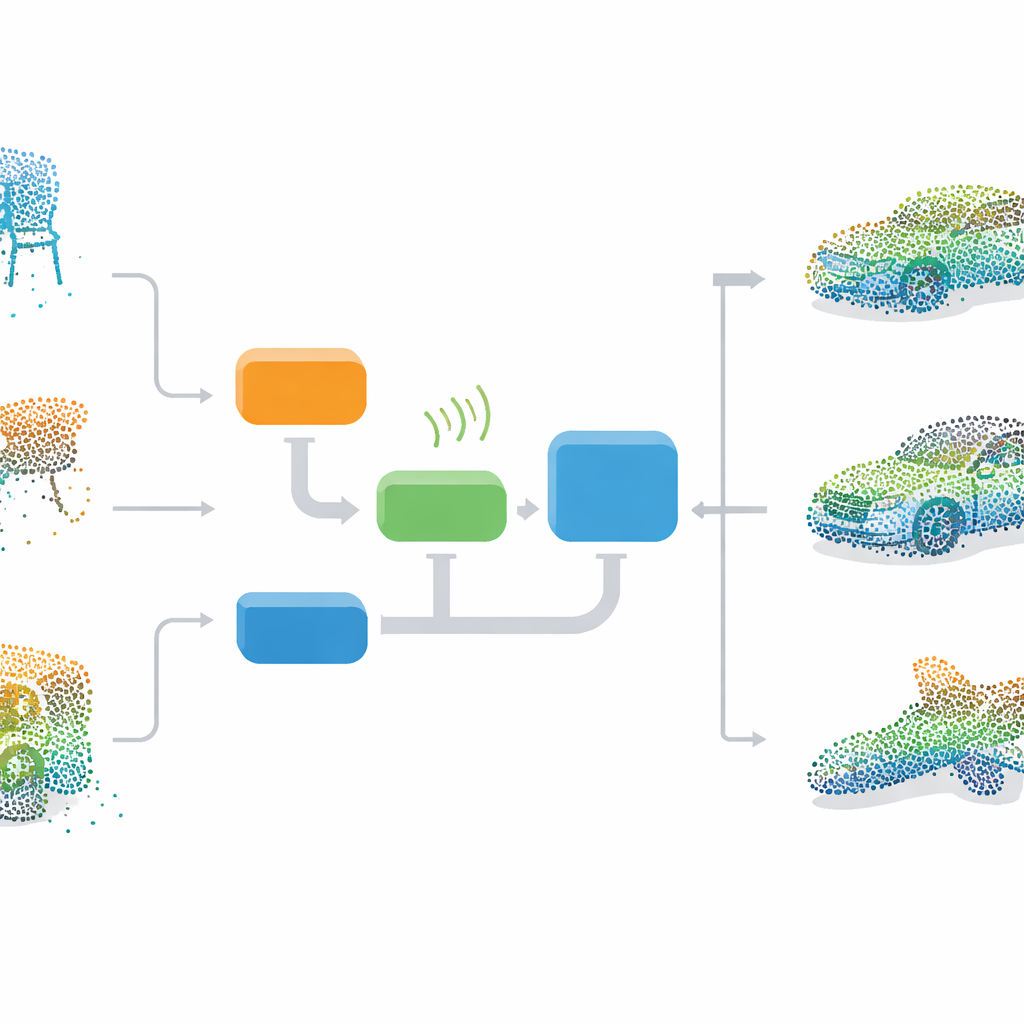
Uczenie 3D wyobraźni
Autorzy proponują kompleksowe rozwiązanie, które uczy sieć neuronową „wyobrażać” kompletne obiekty 3D od podstaw, a następnie wykorzystuje tę wyobraźnię do naprawy uszkodzonych chmur punktów. W jego centrum znajduje się GAN — model dwuetapowy, w którym generator uczy się tworzyć realistyczne chmury punktów 3D, a dyskryminator rozpoznaje prawdziwe kształty od wygenerowanych. Podczas treningu generator zaczyna od przypadkowego hałasu i stopniowo uczy się ogólnych rozkładów krzeseł, łóżek, samochodów i innych obiektów na standardowym zestawie danych ModelNet40. Ponieważ uczy się wyłącznie na przykładach pełnych obiektów, metoda nie wymaga precyzyjnie dopasowanych par danych niekompletnych i kompletnych, co zwiększa jej użyteczność w rzeczywistych zastosowaniach.
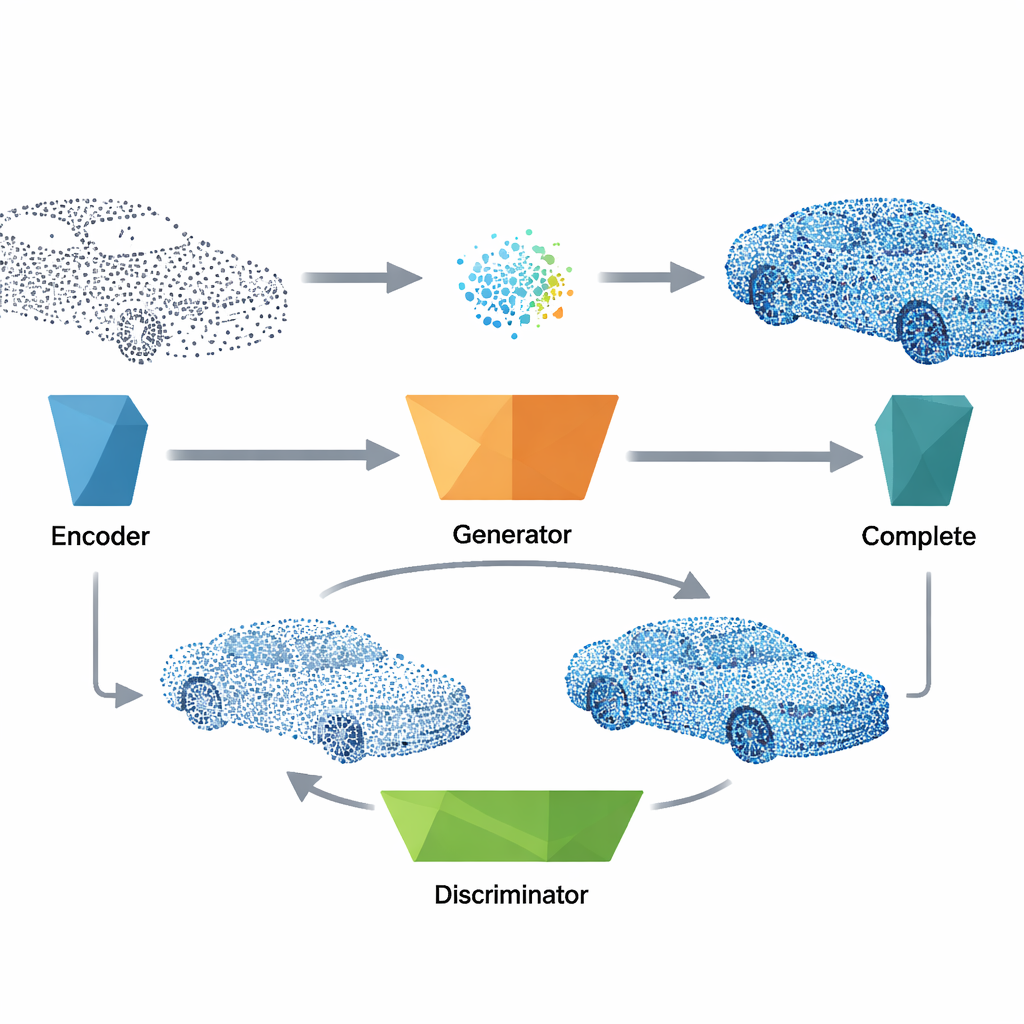
Jak system wypełnia luki
Aby naprawić uszkodzoną chmurę punktów, system najpierw przepuszcza niepełne dane przez kompaktowy enkoder, który destyluje ich ogólny kształt do krótkiego wektora cech. Ten wektor pełni rolę podobną do hałasu używanego w czasie treningu i jest podawany do wytrenowanego generatora, który wytwarza prawdopodobną, kompletną wersję obiektu, włącznie z informacjami o geometrii i orientacji powierzchni. Następnie metoda łączy wygenerowane punkty z oryginalnymi pomiarami, konsolidując to, co rzeczywiście zaobserwowano, z najlepszymi przypuszczeniami sieci co do brakujących części. Końcowy etap porządkujący usuwa punkty odstające za pomocą sprawdzenia najbliższego sąsiedztwa, a potem ponownie próbkowuje wynik, aby punkty były równomiernie rozłożone, dając schludny, jednorodny model 3D gotowy do dalszych zadań.
Równoważenie realizmu, szczegółu i wydajności
Aby rekonstrukcje były jednocześnie spójne globalnie i gładkie lokalnie, autorzy projektują wieloczęściowy cel treningowy. Oprócz głównego sygnału rywalizacyjnego zmuszającego generator do oszukiwania dyskryminatora, wprowadzają składniki nagradzające zgodne kierunki powierzchni, dobre dopasowanie wygenerowanych punktów do rzeczywistych kształtów oraz naturalne lokalne odstępy między sąsiednimi punktami. Wydajna strategia wyszukiwania zorientowana na osie utrzymuje te lokalne kontrole szybkimi nawet dla dużych zbiorów punktów. Eksperymenty pokazują, że to połączenie funkcji straty jest kluczowe dla stabilnego uczenia: usunięcie dowolnego elementu szkodzi albo ogólnemu kształtowi, albo drobnym detalom. Pomimo tej złożoności końcowy model jest lekki i działa w ułamkach sekundy na nowoczesnym sprzęcie, co czyni go odpowiednim do zastosowań bliskich czasu rzeczywistego.
Od benchmarków laboratoryjnych po sceny ze świata rzeczywistego
Na benchmarku ModelNet40 proponowane podejście przewyższa zarówno klasyczne algorytmy oparte na geometrii, jak i kilka czołowych metod uczenia głębokiego w standardowych miarach błędu. Odtwarza samochody, krzesła i łóżka z większą wiernością, szczególnie gdy brakuje ponad połowy punktów. Porównania wizualne pokazują, że metoda przywraca kluczowe elementy strukturalne — takie jak dachy samochodów czy oparcia krzeseł — których inne metody często nie wykrywają. Autorzy testują system także na rzeczywistych skanach wnętrz i symulowanych scenach drogowych, gdzie zacienienia i szum są znacznie poważniejsze niż w czystych zestawach danych. W obu przypadkach uzupełnione chmury punktów dostarczają dokładniejszych map 3D i wspierają lepsze planowanie tras: z uzupełnioną geometrią algorytmy planowania mogą przewidywać ukryte przeszkody i wybierać płynniejsze, bezpieczniejsze trasy.
Jaśniejszy obraz światów 3D
Podsumowując, praca pokazuje, że starannie zaprojektowany GAN może nauczyć solidnego priorytetu 3D i wykorzystać go do uzupełniania silnie uszkodzonych chmur punktów bez polegania na parach treningowych. Łącząc prosty enkoder, potężny generator, rozważnego dyskryminatora i przemyślaną funkcję straty, system generuje kompletne, gładkie i strukturalnie poprawne kształty 3D z rzadkich i zaszumionych wejść. Dla osób spoza specjalizacji kluczowy przekaz jest taki, że algorytmy potrafią teraz „zgadywać” brakujące informacje 3D w sposób zarówno realistyczny, jak i praktyczny, pomagając robotom, pojazdom i systemom wirtualnej rzeczywistości widzieć pełniejszy obraz otaczającego świata.
Cytowanie: Zhao, D., Mao, S., Shao, J. et al. Generative adversarial networks for high-fidelity 3D point cloud completion. Sci Rep 16, 14076 (2026). https://doi.org/10.1038/s41598-026-44111-5
Słowa kluczowe: Chmury punktów 3D, uzupełnianie kształtów, sieci generatywno‑rywalizacyjne, nawigacja autonomiczna, percepcja robotyczna