Clear Sky Science · tr
Yüksek doğruluklu 3B nokta bulutu tamamlama için üretken rekabetçi ağlar
3B boşlukları doldurmanın önemi
Günlük yaşamı yeniden şekillendiren birçok teknoloji—sürücüsüz araçlardan ev robotlarına ve sanal gerçekliğe—dünyanın ayrıntılı bir 3B anlayışına dayanır. Bu sistemler sıklıkla nesneleri ve mekanları tanımlamak için uzaydaki milyonlarca noktayı toplayan sensörler kullanır. Ancak pratikte bu "nokta bulutları" görüş engelleri, parlak yüzeyler veya sınırlı bakış açıları nedeniyle boşluklarla doludur. Bu makale, üretilen rekabetçi ağ (GAN) adı verilen bir yapay zeka türünü kullanarak, verinin yarısından fazlası kaybolsa bile eksik 3B yapıları akıllıca yeniden oluşturmanın yeni bir yolunu sunuyor.
Dağınık noktalarla şekilleri görmek
3B nokta bulutu, bir nesnenin veya sahnenin yüzeyini çizen bir dizi yıldız kümesi gibidir. Lazer tarayıcılar ve derinlik kameraları bu tür verileri yakalamayı kolaylaştırdı, ancak gerçek dünya ölçümleri nadiren tamdır. Geleneksel onarım yöntemleri yakın yüzeyleri düzleştirme veya komşu noktalar arasında enterpolasyon gibi yerel püf noktalarına dayanır ve yalnızca küçük delikler olduğunda en iyi şekilde çalışır. Daha yeni derin öğrenme yöntemleri şekil kalıplarını öğrenerek gelişme sağlar, ancak genellikle her nesnenin bozuk ve tamamen sağlam sürümünü gösteren dikkatle hazırlanmış eğitim çiftlerine ihtiyaç duyarlar. Bu gereksinim, küratörlü araştırma veri setleri dışına taşındığında karşılanması zordur ve bir arabanın gövdesi veya bir sandalyenin bacakları gibi nesnenin bütün bölümleri eksik olduğunda performansı sınırlar.
3B hayal gücünü öğretmek
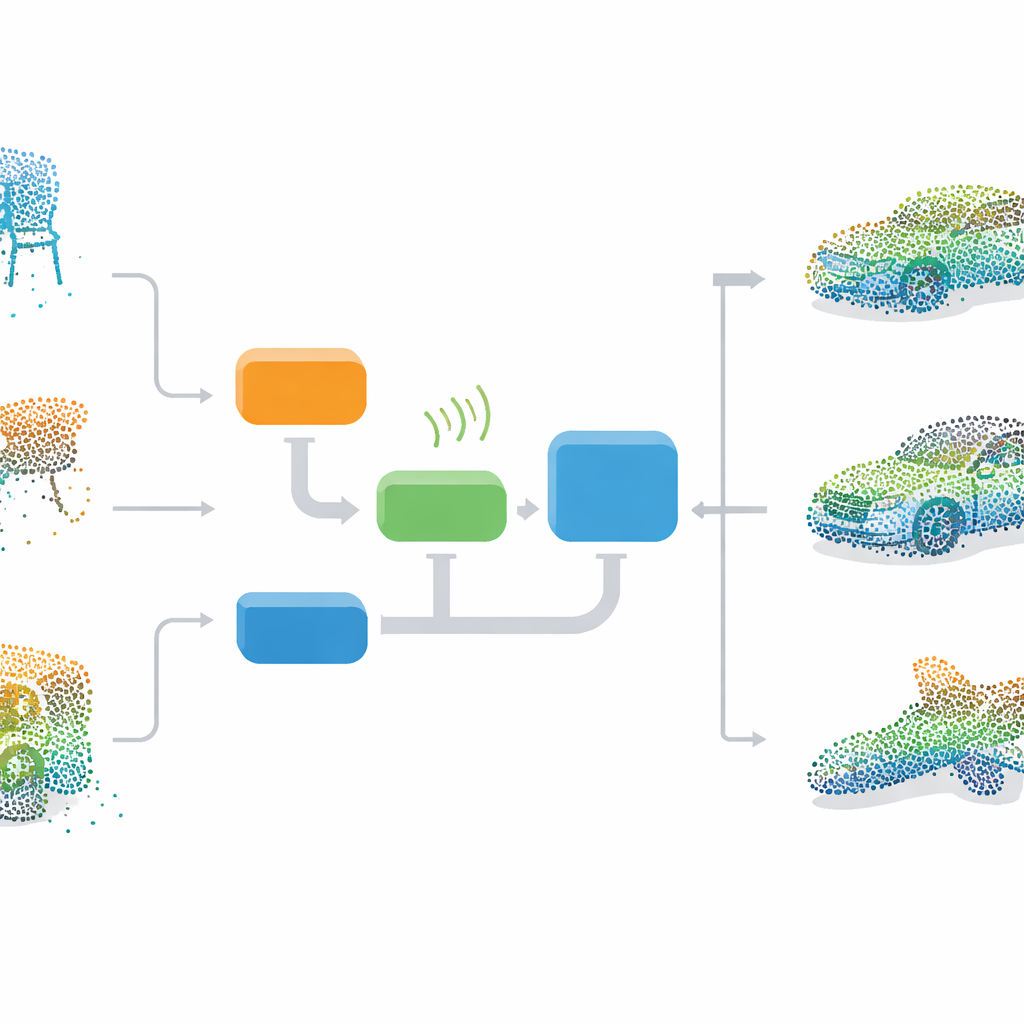
Yazarlar, bir sinir ağını baştan sona eksiksiz 3B nesneler hayal etmeyi öğreten ve ardından bu hayal gücünü bozuk nokta bulutlarını onarmak için kullanan bir çerçeve öneriyor. Bunun merkezinde, bir üreticinin gerçekçi 3B nokta bulutları oluşturmayı, bir ayrımcının ise gerçek şekilleri sahtelerinden ayırt etmeyi öğrendiği iki parçalı bir model olan bir GAN vardır. Eğitim sırasında üretici rastgele gürültüden başlar ve zamanla ModelNet40 adı verilen standart bir veri kümesindeki sandalyeler, yataklar, arabalar ve diğer nesnelerin genel dağılımlarını öğrenir. Yalnızca tam örneklerden öğrendiği için, yöntem eksik ve tam veri çiftlerine ihtiyaç duymaz; bu da gerçek dünya kullanımı için daha pratik hale getirir.
Sistemin boşlukları doldurma biçimi
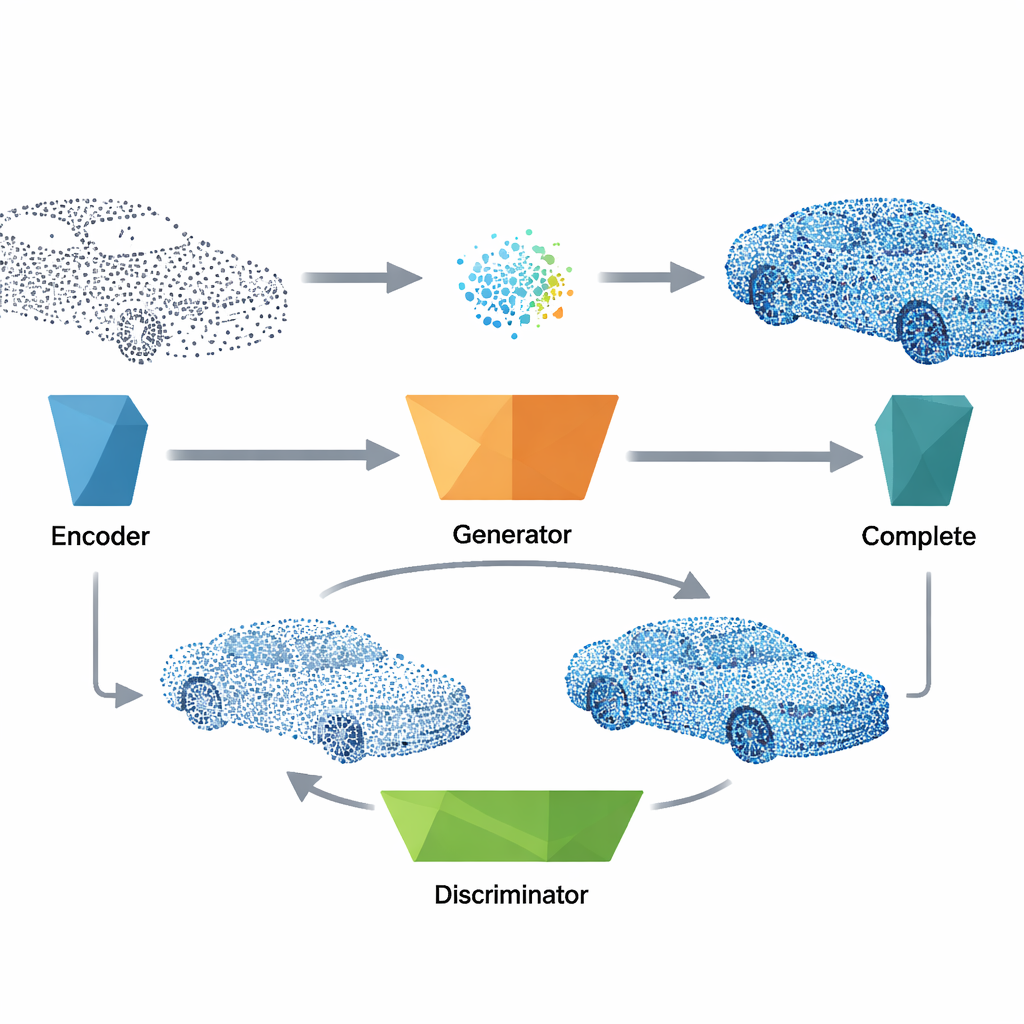
Bozuk bir nokta bulutunu onarmak için sistem önce eksik verileri kısa bir özellik vektöründe genel şeklini yoğunlaştıran kompakt bir kodlayıcıdan geçirir. Bu vektör, eğitim sırasında kullanılan gürültü ile aynı rolü oynar ve eğitilmiş üreticiye beslenir; üretici nesnenin geometri ve yüzey yönelim bilgilerini de içeren makul bir tam sürümünü üretir. Yöntem daha sonra üretilen noktaları orijinal ölçümlerle birleştirir; gerçek gözlemleri ağın eksik parçalar için en iyi tahminiyle harmanlar. Son bir temizleme adımı aykırı noktaları en yakın komşu kontrolüyle kaldırır ve ardından noktaların eşit şekilde dağılmasını sağlamak için yeniden örnekleme yapar; bu da aşağı akış görevleri için düzenli, homojen bir 3B model verir.
Gerçekçilik, detay ve verimlilik dengesi
Yeniden yapılandırmaları hem küresel olarak tutarlı hem de yerel olarak düzgün kılmak için yazarlar çok parçalı bir eğitim hedefi tasarlıyor. Ayrımcıyı kandırması için üreticiyi zorlayan temel rekabetçi sinyale ek olarak, tutarlı yüzey yönlerini, üretilen noktaların gerçek şekillerle iyi hizalanmasını ve komşu noktalar arasında doğal yerel boşluklandırmayı ödüllendiren terimler ekliyorlar. Verimli eksen-eşlenik bir arama stratejisi, bu yerel kontrolleri büyük nokta setleri için bile hızlı tutuyor. Deneyler, bu kayıp kombinasyonunun istikrarlı öğrenme için çok önemli olduğunu gösteriyor: bunlardan herhangi birinin çıkarılması ya genel şekli ya da ince detayları zedeler. Bu karmaşıklığa rağmen nihai model hafiftir ve modern donanımda saniyenin parçalarında çalışır; bu da onu yakın gerçek zamanlı uygulamalar için uygun kılar.
Laboratuvar ölçütlerinden gerçek dünya sahnelerine
ModelNet40 kıyaslamasında önerilen yaklaşım, klasik geometri tabanlı algoritmaları ve önde gelen birkaç derin öğrenme yöntemini standart hata ölçümleri genelinde geride bırakıyor. Özellikle orijinal noktaların yarısından fazlası eksik olduğunda arabaları, sandalyeleri ve yatakları daha yüksek sadakatle yeniden oluşturuyor. Görsel karşılaştırmalar yöntemin diğer yöntemlerin sıklıkla kaçırdığı araba tavanları ve sandalye sırtlıkları gibi temel yapısal bileşenleri geri getirdiğini gösteriyor. Yazarlar ayrıca sistemi daha fazla görüş engeli ve gürültü içeren gerçek iç mekân taramalarında ve simüle edilmiş sürüş sahnelerinde test ediyor. Her iki ortamda da tamamlanmış nokta bulutları daha doğru 3B haritalar veriyor ve yol planlamayı iyileştiriyor: doldurulmuş geometri sayesinde planlama algoritmaları gizli engelleri tahmin edebiliyor ve daha düzgün, daha güvenli rotalar seçebiliyor.
3B dünyaların daha net bir resmi
Özetle, bu çalışma özenle tasarlanmış bir GAN’ın güçlü bir 3B önbilgi öğrenebileceğini ve eşleştirilmiş eğitim verilerine dayanmadan ağır hasarlı nokta bulutlarını tamamlamak için bunu kullanabileceğini gösteriyor. Basit bir kodlayıcı, güçlü bir üretici, seçkin bir ayrımcı ve düşünceli bir kayıp fonksiyonunu birleştirerek sistem seyrek ve gürültülü girdilerden tam, düzgün ve yapısal olarak sağlam 3B şekiller üretiyor. Uzman olmayanlar için ana mesaj şu: algoritmalar artık çevrelerindeki dünyanın eksik 3B bilgilerini hem gerçekçi hem de pratik bir şekilde "tahmin" edebiliyor; bu da robotların, araçların ve sanal gerçeklik sistemlerinin dünyayı daha eksiksiz görmesine yardımcı oluyor.
Atıf: Zhao, D., Mao, S., Shao, J. et al. Generative adversarial networks for high-fidelity 3D point cloud completion. Sci Rep 16, 14076 (2026). https://doi.org/10.1038/s41598-026-44111-5
Anahtar kelimeler: 3B nokta bulutları, şekil tamamlama, üretken rekabetçi ağlar, otonom gezinme, robot algısı