Clear Sky Science · he
רשתות ניגודיות מחוללות להשלמה באיכות גבוהה של ענני נקודות תלת־ממדיים
מדוע חשוב למלא את החורים בתלת־ממד
טכנולוגיות שמשנות את חיי היומיום — מהרכבים האוטונומיים ועד רובוטים ביתיים ומציאות מדומה — תלויות בהבנה תלת־ממדית מדויקת של העולם. מערכות אלה לעתים קרובות משתמשות בחיישנים שאוספים מיליוני נקודות בחלל כדי לתאר אובייקטים וחדרים. אך בפועל, "ענני נקודות" כאלה מלאים בחסרים בגלל הסתירויות, משטחים מבריקים או נקודות מבט מוגבלות. המאמר מציג שיטה חדשה למלא את החסרים באופן חכם, באמצעות סוג של אינטיליגנציה מלאכותית הידועה כרשת ניגודית מחוללת (GAN), כדי לשחזר מבנים תלת־ממדיים חסרים אפילו כאשר יותר מחצי מהנתונים נעדרים.
לראות צורות מתוך נקודות מפוזרות
ענן נקודות תלת־ממדי דומה למערך כוכבים שמשרטט את משטחו של אובייקט או סצנה. סורקי לייזר ומצלמות עומק הקלו על לכידת נתונים כאלה, אבל מדידות מהעולם האמיתי נדירות כשיש להן שלמות מלאה. שיטות שיפוץ מסורתיות מסתמכות על תחבולות מקומיות, כמו החלקת משטחים סמוכים או אינטרפולציה בין נקודות שכנות, והן עובדות היטב בעיקר כאשר יש חורים קטנים בלבד. שיטות למידת עומק חדשות משפרות זאת על ידי למידת דפוסי צורה, אך בדרך כלל הן זקוקות לזוגות אימון מדויקים שמציגים גם את הגרסה השבורה וגם את הגרסה השלמה של כל אובייקט. דרישה זו קשה למימוש מחוץ למערכי נתונים מחוטבים ומגבילה את הביצועים כשיש חסרים של חלקים שלמים של האובייקט — כמו גוף רכב או רגלי כיסא.
להקנות דמיון תלת־ממדי
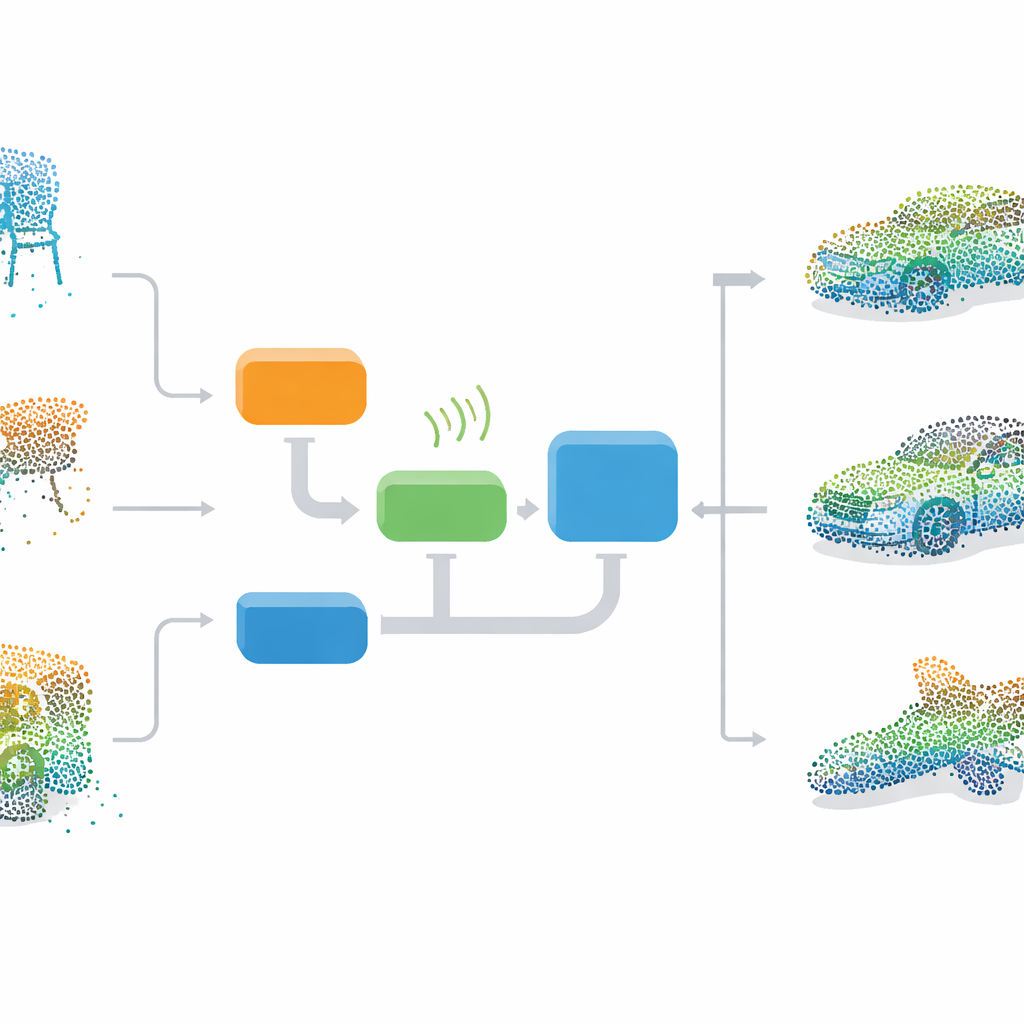
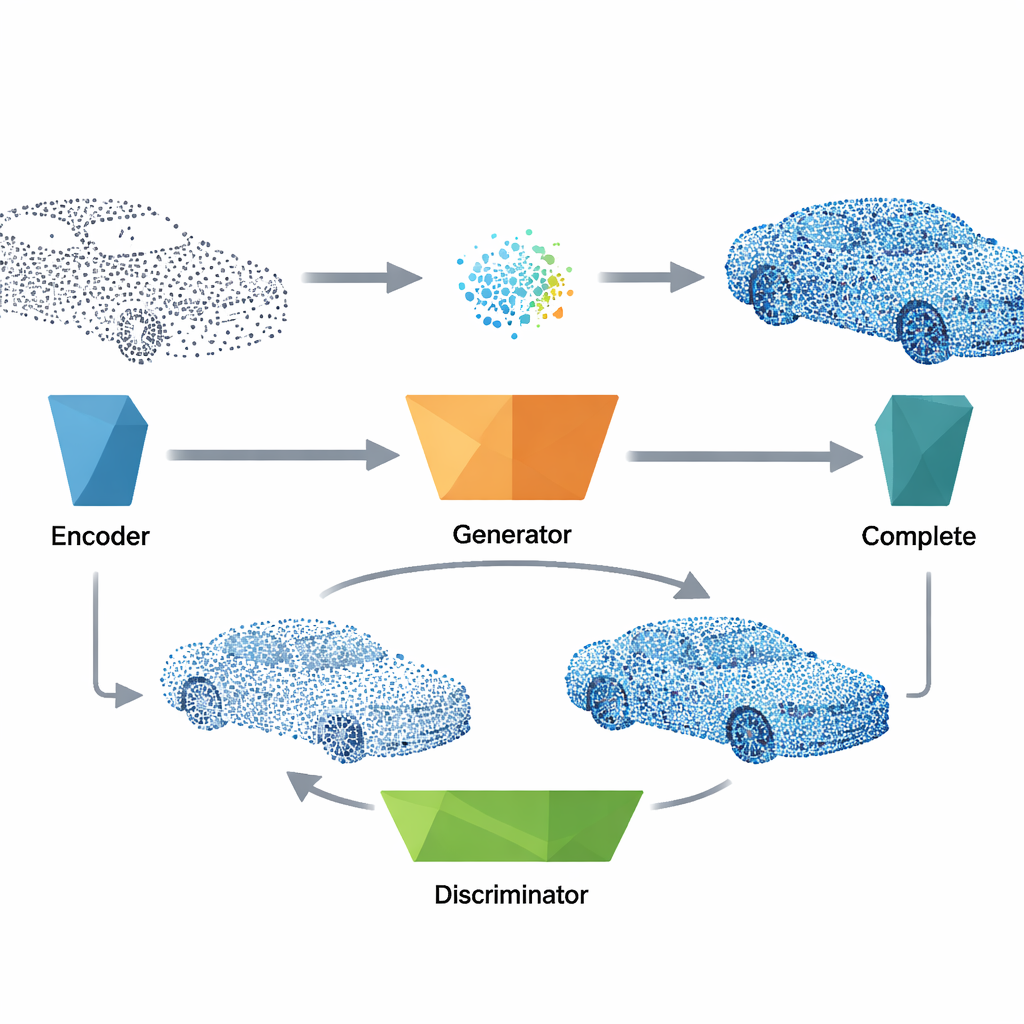
המחברים מציעים מסגרת מקצה אל מקצה שמלמדת רשת נוירונים "להעלות בדמיון" אובייקטים תלת־ממדיים שלמים מאפס, ואז להשתמש בדמיון הזה כדי לתקן ענני נקודות פגומים. בלב השיטה עומדת GAN, מודל בעל שני חלקים שבו יוצר (generator) לומד ליצור ענני נקודות תלת־ממדיים מציאותיים בעוד שמבחין (discriminator) לומד להבחין בין צורות אמיתיות למזוייפות. במהלך האימון מתחיל היוצר מרעש אקראי ולומד בהדרגה את ההתפלגויות הכלליות של כיסאות, מיטות, רכבים ואובייקטים אחרים במאגר תקני הנקרא ModelNet40. מאחר שמלמדים אותו רק על דוגמאות שלמות, השיטה לא זקוקה לזוגות תואמים של נתונים חסרים ושלמים, מה שעושה אותה יותר מעשית לשימוש בעולם האמיתי.
איך המערכת ממלאת את החורים
כדי לתקן ענן נקודות שבור, המערכת מעבירה תחילה את הנתונים החסרים דרך מקודד קומפקטי שמזקק את הצורה הכללית לווקטור תכונה קצר. וקטור זה ממלא את אותו תפקיד כמו הרעש שהשתמשו בו במהלך האימון ומוזן ליוצר המאומן, שמייצר גרסה שלמה סבירה של האובייקט, כולל גאומטריה ומידע על כיוון המשטח. לאחר מכן השיטה מאחדת את הנקודות שנוצרו עם המדידות המקוריות, ומשלבת את מה שנצפה בפועל עם הניחוש הטוב ביותר של הרשת לגבי החלקים החסרים. שלב ניקוי סופי מסיר נקודות חריגות באמצעות בדיקת השכנים הקרובים ולאחר מכן מחדש לדגום את התוצאה כך שהנקודות יתפזרו באופן אחיד, מה שמניב מודל תלת־ממדי מסודר ואחיד המוכן למשימות המשך.
איזון בין ריאליזם, פרטים ויעילות
כדי להפוך את השחזורים גם לקוהרנטיים ברמה הגלובלית וגם חלקים ברמה המקומית, המחברים מתכננים פונקציית אובייקט אימון מרובת חלקים. בנוסף לאיתות הניגודי הליבה שמניע את היוצר להטעות את המבחין, הם מצרפים טרמינים שמתגמלים כיווני משטח עקביים, יישור טוב של נקודות שנוצרו עם צורות אמיתיות וריווח מקומי טבעי בין נקודות שכנות. אסטרטגיית חיפוש יעילה מיושר־צירים שומרת על בדיקות מקומיות מהירות גם עבור קבוצות נקודות גדולות. ניסויים מראים ששילוב ההפסדים הזה הוא קריטי ללמידה יציבה: הסרה של כל אחד מהם פוגעת או בצורת הכולל או בפרטים העדינים. על אף המורכבות הזו, הדגם הסופי קל משקל, פועל בשבריר שניות על חומרה מודרנית, מה שהופך אותו מתאים ליישומים בסמוך לזמן אמת.
ממדדי מעבדה לסצנות מהעולם האמיתי
במדד ModelNet40, הגישה המוצעת מנצחת הן אלגוריתמים קלאסיים מבוססי גאומטריה והן כמה משיטות הלמידה העמוקות המובילות לפי מדדי שגיאה סטנדרטיים. היא משחזרת רכבים, כיסאות ומיטות ברמת נאמנות גבוהה יותר, במיוחד כאשר יותר מחצי מהנקודות המקוריות חסרות. השוואות חזותיות מראות שהשיטה משחזרת רכיבים מבניים מרכזיים — כמו גגות רכבים ומשענות כיסאות — שאחרות לעתים קרובות מפספסות. המחברים גם בודקים את המערכת על סריקות פנימיות אמיתיות וסצנות נהיגה מדומות, שבהן ההסתירויות והרעש חמורים בהרבה מאשר במערכי נתונים נקיים. בשני ההקשרים, ענני הנקודות שהושלמו מניבים מפות תלת־ממד מדויקות יותר ותומכים בתכנון מסלולים טוב יותר: עם הגיאומטריה המושלמת, אלגוריתמים לתכנון יכולים לחזות מכשולים נסתרי ולהחליט על מסלולים חלקים ובטוחים יותר.
תמונה ברורה יותר של עולמות תלת־ממד
לסיכום, העבודה מראה כי GAN שעוצב בקפידה יכול ללמוד פריור חזק לתלת־ממד ולהשתמש בו כדי להשלים ענני נקודות שניזוקו קשות ללא הסתמכות על נתוני אימון בזוגות. באמצעות שילוב מקודד פשוט, יוצר עוצמתי, מבחין חד ולשל פונקציית הפסד מעוצבת בכוונה, המערכת מייצרת צורות תלת־ממד שלמות, חלקות ומבניות מתוך קלט דל ורועש. עבור קוראים שאינם מומחים, המסר המרכזי הוא שאלגוריתמים מסוגלים כעת "להעריך" מידע תלת־ממדי חסר באופן שהוא גם מציאותי וגם פרקטי, ועוזרים לרובוטים, כלי רכב ומערכות מציאות מדומה לראות תמונה שלמה יותר של העולם סובבם.
ציטוט: Zhao, D., Mao, S., Shao, J. et al. Generative adversarial networks for high-fidelity 3D point cloud completion. Sci Rep 16, 14076 (2026). https://doi.org/10.1038/s41598-026-44111-5
מילות מפתח: ענני נקודות תלת־ממד, השלמת צורה, רשתות ניגודיות מחוללות, ניווט אוטונומי, תפיסת רובוטים