Clear Sky Science · ru
Генеративно-состязательные сети для высокоточной достройки 3D точечных облаков
Почему важно заполнять 3D-пробелы
Многие технологии, меняющие повседневную жизнь — от беспилотных автомобилей до домашних роботов и виртуальной реальности — опираются на детальное 3D-понимание окружающего мира. Эти системы часто используют датчики, которые собирают миллионы точек в пространстве, описывающих объекты и помещения. На практике такие «точечные облака» полны пропусков из‑за окклюзий, бликующих поверхностей или ограниченных ракурсов. В статье предложен новый способ интеллектуального заполнения этих пробелов с помощью типа искусственного интеллекта — генеративно-состязательной сети (GAN), — который восстанавливает недостающие 3D‑структуры даже при потере более половины данных.
Видеть форму по разрозненным точкам
3D точечное облако похоже на созвездие точек, набрасывающее контур поверхности объекта или сцены. Лазерные сканеры и камеры глубины упростили захват таких данных, но реальные измерения редко бывают полными. Традиционные методы ремонта опираются на локальные приёмы — например, сглаживание соседних поверхностей или интерполяцию между близлежащими точками — и дают лучший результат при наличии лишь небольших отверстий. Более современные методы глубокого обучения улучшают ситуацию, обучаясь распознавать шаблоны форм, но обычно им нужны аккуратно подготовленные пары данных: повреждённый вариант и полный эталон. Это требование трудно выполнить вне курируемых исследовательских наборов, и оно ограничивает качество, когда отсутствуют целые части объекта — например, кузов машины или ножки стула.
Обучение 3D‑воображению
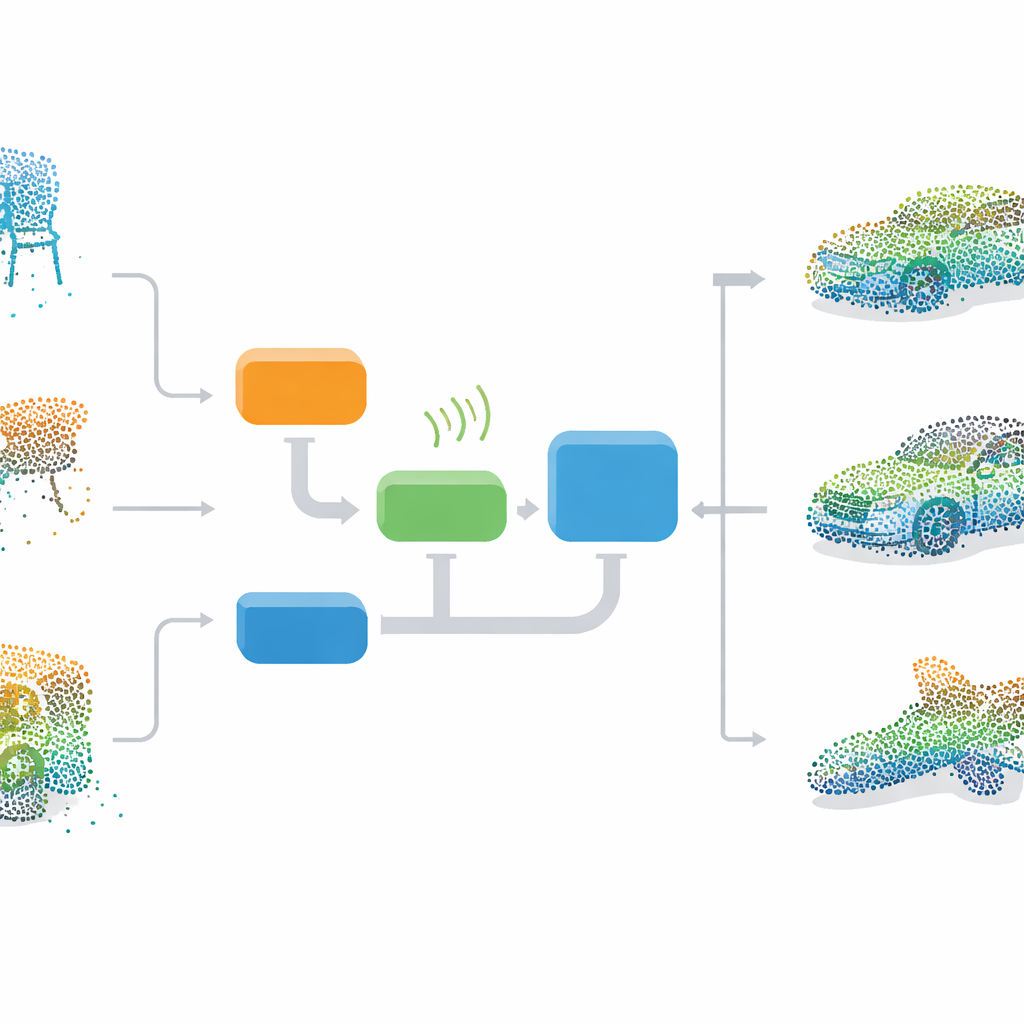
Авторы предлагают сквозную архитектуру, которая обучает нейросеть «представлять» полные 3D‑объекты с нуля и затем использовать это воображение для восстановления повреждённых точечных облаков. В основе — GAN, модель из двух частей: генератор учится создавать правдоподобные 3D‑облака, а дискриминатор — отличать реальные формы от подделок. При обучении генератор стартует с случайного шума и постепенно усваивает распределения форм кресел, кроватей, автомобилей и других объектов на стандартном наборе ModelNet40. Поскольку он учится только на полных примерах, методу не нужны аккуратно сопоставленные пары неполных и полных данных, что делает его более применимым в реальных условиях.
Как система заполняет пробелы
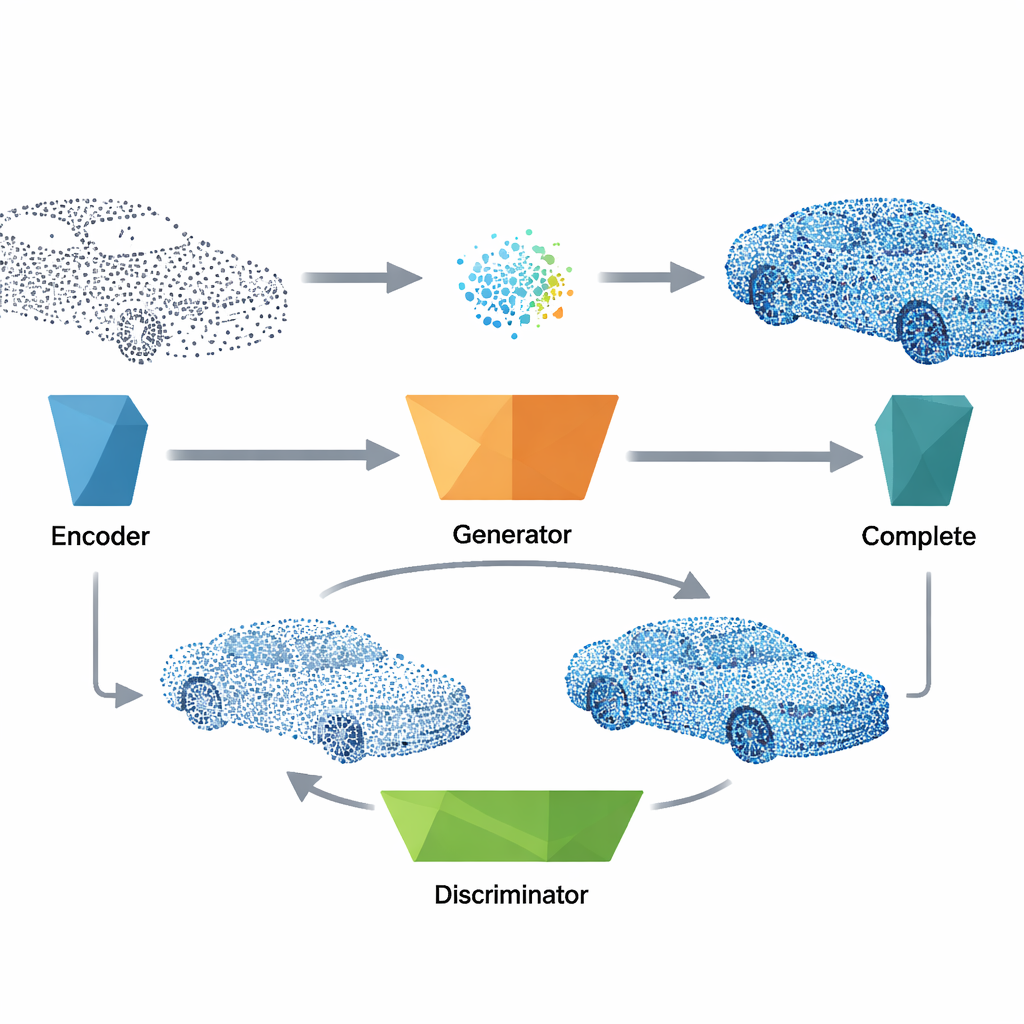
Для восстановления повреждённого облака система сначала пропускает неполные данные через компактный энкодер, который сжимает общую форму в короткий вектор признаков. Этот вектор выполняет ту же роль, что и шум при обучении, и подаётся в обученный генератор, который генерирует правдоподобную полную версию объекта, включая геометрию и информацию о направленности поверхностей. Затем метод объединяет сгенерированные точки с исходными измерениями, сочетая то, что действительно наблюдалось, с наилучшей догадкой сети о недостающих частях. Финальный этап очистки удаляет выбросы с помощью проверки ближайших соседей и затем пересэмплирует результат так, чтобы точки были равномерно распределены, получая аккуратную, однородную 3D‑модель, готовую для дальнейших задач.
Баланс между реализмом, детализацией и эффективностью
Чтобы реконструкции были одновременно глобально связными и локально гладкими, авторы разработали многочастную функцию потерь при обучении. Помимо основного состязательного сигнала, который заставляет генератор обманывать дискриминатор, они вводят термы, поощряющие согласованность направлений поверхностей, хорошее выравнивание с реальными формами и естественную локальную плотность точек. Эффективная осевая стратегия поиска сохраняет быстрые локальные проверки даже для больших облаков. Эксперименты показывают, что такое сочетание потерь критично для стабильного обучения: исключение любого компонента ухудшает либо общую форму, либо мелкие детали. Несмотря на эту сложность, итоговая модель компактна и работает за доли секунды на современном оборудовании, что делает её пригодной для задач близких к реальному времени.
От лабораторных тестов к реальным сценам
На бенчмарке ModelNet40 предложенный подход превосходит как классические алгоритмы на основе геометрии, так и несколько ведущих методов глубокого обучения по стандартным метрикам ошибки. Он восстанавливает автомобили, кресла и кровати с более высокой точностью, особенно когда более половины исходных точек отсутствуют. Визуальные сравнения показывают, что метод возвращает ключевые структурные элементы — например, крыши автомобилей и спинки кресел — которые другие методы часто упускают. Авторы также протестировали систему на реальных сканах интерьеров и на смоделированных сценах вождения, где окклюзии и шум гораздо сильнее, чем в чистых наборах данных. В обоих случаях заполненные облака обеспечивали более точные 3D‑карты и улучшали планирование маршрутов: с дополненной геометрией алгоритмы могли предсказывать скрытые препятствия и выбирать более плавные, безопасные траектории.
Более ясная картина 3D‑миров
В итоге работа демонстрирует, что грамотно спроектированный GAN может выучить мощный 3D‑приор и использовать его для восстановления сильно повреждённых точечных облаков без опоры на парные обучающие данные. Объединив простой энкодер, мощный генератор, проницательный дискриминатор и продуманную функцию потерь, система порождает полные, гладкие и структурно состоятельные 3D‑формы из разреженных и шумных входов. Для неспециалистов главный вывод в том, что алгоритмы теперь могут «догадаться» о недостающей 3D‑информации — реалистично и практично — помогая роботам, транспортным средствам и системам виртуальной реальности видеть более полную картину окружающего мира.
Цитирование: Zhao, D., Mao, S., Shao, J. et al. Generative adversarial networks for high-fidelity 3D point cloud completion. Sci Rep 16, 14076 (2026). https://doi.org/10.1038/s41598-026-44111-5
Ключевые слова: 3D точечные облака, восстановление формы, генеративно-состязательные сети, автономная навигация, восприятие роботов