Clear Sky Science · ar
الشبكات التنافسية التوليدية لإكمال سحابات نقاط ثلاثية الأبعاد عالية الوفاء
لماذا يهم سد الفراغات ثلاثية الأبعاد
تعتمد العديد من التقنيات التي تعيد تشكيل حياتنا اليومية — من السيارات ذاتية القيادة إلى الروبوتات المنزلية والواقع الافتراضي — على فهم ثلاثي الأبعاد مفصّل للعالم. غالبًا ما تستخدم هذه الأنظمة حسّاسات تجمع ملايين النقاط في الفضاء لتهيئة مخططات للأشياء والغرف. لكن في الممارسة العملية تكون مثل هذه «سحابات النقاط» مليئة بالثغرات بسبب الانسدادات، الأسطح اللامعة، أو زوايا الرؤية المحدودة. تقدم هذه الورقة طريقة جديدة لملء تلك الفراغات بذكاء، باستخدام نوع من الذكاء الاصطناعي يُدعى الشبكة التنافسية التوليدية (GAN) لإعادة بناء البُنى ثلاثية الأبعاد المفقودة حتى عندما يفقد أكثر من نصف البيانات.
رؤية الأشكال من نقاط متناثرة
سحابة النقاط ثلاثية الأبعاد تشبه كوكبة من النُقَط التي ترسم سطح جسم أو مشهد. جعلت الماسحات الليزرية وكاميرات العمق التقاط هذه البيانات أمراً سهلاً، لكن القياسات الواقعية نادراً ما تكون كاملة. تعتمد طرق الإصلاح التقليدية على حيل محلية، مثل تنعيم الأسطح المجاورة أو الاستيفاء بين النقاط القريبة، وتعمل بشكل أفضل عندما تكون الثقوب صغيرة. تحسّن طرق التعلم العميق الأحدث هذا عن طريق تعلم أنماط الأشكال، لكنها عادة ما تحتاج أزواج تدريب مُعَدّة بعناية تُظهر النسخة المكسورة والكاملة من كل كائن. من الصعب تلبية هذا الشرط خارج مجموعات البيانات المُنظّمة لأغراض البحث، وهو ما يقيّد الأداء عندما تكون أجزاء كاملة من جسم الكائن مفقودة — مثل جسم سيارة أو أرجل كرسي.
تعليم خيال ثلاثي الأبعاد
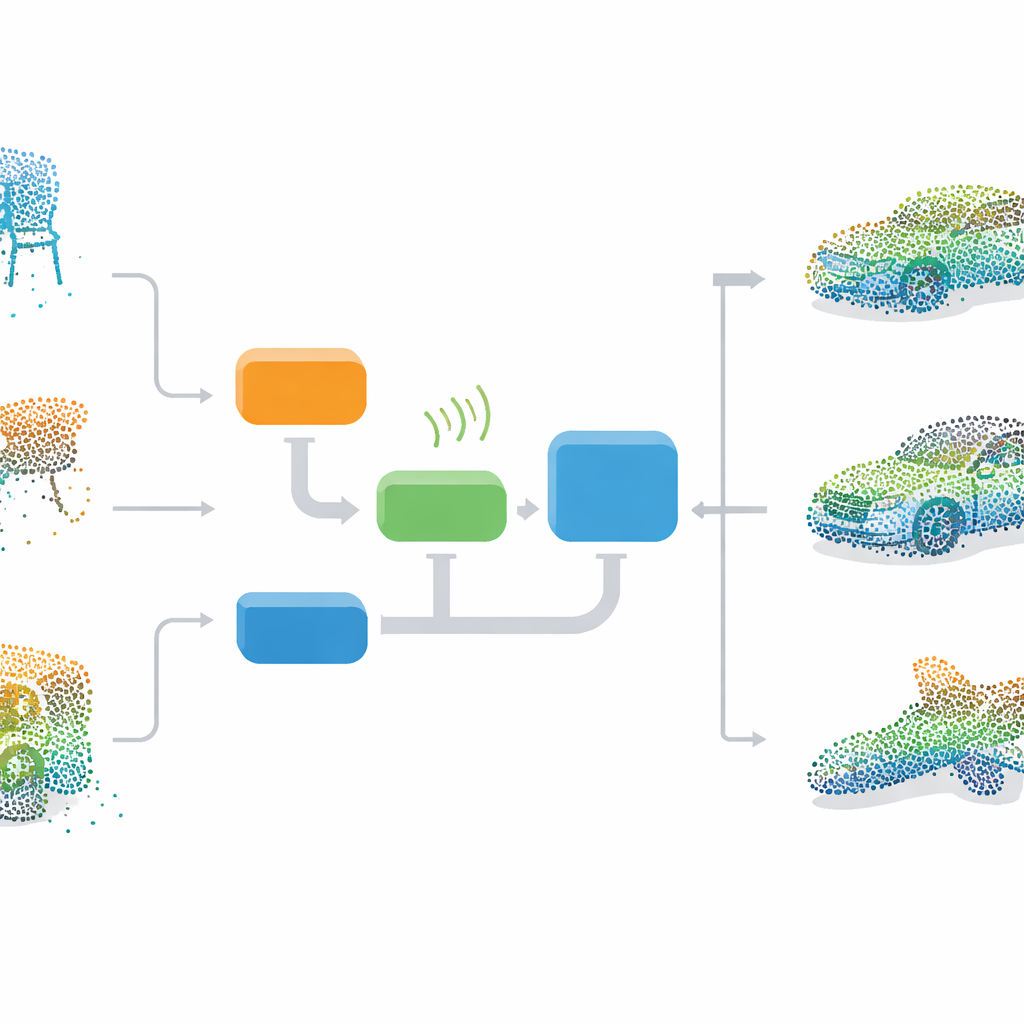
يقترح المؤلفون إطار عمل متكامل يُعلّم شبكة عصبية كيف تتخيل أجساماً ثلاثية الأبعاد كاملة من الصفر، ثم يستخدم تلك «الخيالات» لإصلاح سحابات نقاط تالفة. جوهر الإطار هو GAN، نموذج من جزأين حيث يتعلم المولد إنشاء سحابات نقاط ثلاثية الأبعاد واقعية بينما يتعلم المميّز التفريق بين الأشكال الحقيقية والمزيفة. أثناء التدريب، يبدأ المولد من ضوضاء عشوائية ويتعلَم تدريجياً التوزيعات العامة للكراسي والأسرة والسيارات وغيرها من الأجسام في مجموعة بيانات معيارية تُدعى ModelNet40. وبما أنه يتعلم من أمثلة كاملة فقط، فإن الطريقة لا تحتاج إلى أزواج متطابقة بعناية من البيانات الناقصة والكاملة، مما يجعلها أكثر عملية للاستخدام في العالم الحقيقي.
كيف يملأ النظام الفراغات
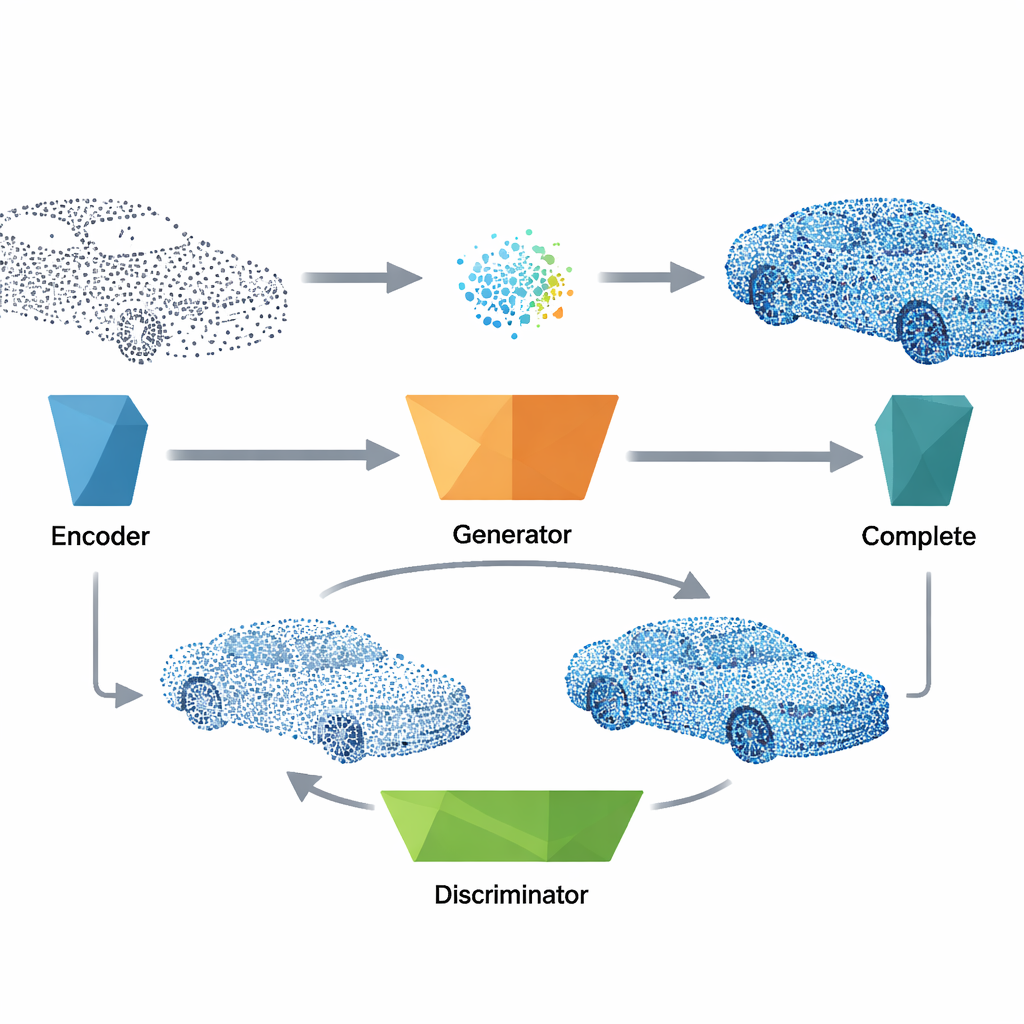
لإصلاح سحابة نقاط مكسورة، يمرر النظام أولاً البيانات الناقصة عبر مشفّر مدمج يختزل الشكل العام إلى متجه ميزات قصير. يلعب هذا المتجه نفس دور الضوضاء المستخدم أثناء التدريب ويُغذَّى إلى المولد المدَرَّب، الذي ينتج نسخة كاملة معقولة من الكائن، بما في ذلك الهندسة ومعلومات اتجاه السطح. ثم يدمج الأسلوب النقاط المولّدة مع القياسات الأصلية، جامعاً بين ما لوحظ فعلياً وما تخمّنه الشبكة للأجزاء المفقودة. تزيل خطوة تنظيف أخيرة النقاط الشاذة باستخدام فحص أقرب جار ثم تُعيد العيّنة بحيث تتوزع النقاط بالتساوي، مما ينتج نموذجاً ثلاثي الأبعاد مرتباً وموحّداً جاهزاً للمهام اللاحقة.
موازنة الواقعية والتفصيل والكفاءة
لجعل عمليات إعادة الإعمار متماسكة على المستوى الكلي وناعمة محلياً، يصمم المؤلفون هدف تدريب متعدد الأجزاء. إلى جانب إشارة المنافسة الأساسية التي تدفع المولد لخداع المميّز، يقدّمون مصطلحات تكافئ اتجاهات السطح المتسقة، ومحاذاة جيدة للنقاط المولّدة مع الأشكال الحقيقية، وتباعدًا محليًا طبيعيًا بين النقاط المجاورة. تحافظ استراتيجية بحث محاذية للمحاور على هذه الفحوصات المحلية سريعة حتى لمجموعات نقاط كبيرة. تُظهر التجارب أن هذا المزيج من الخسائر حاسم لتعلّم مستقر: إزالة أي من مكوّناته يضر إما بالشكل العام أو بالتفاصيل الدقيقة. بالرغم من هذه التعقيدات، يبقى النموذج النهائي خفيف الوزن، ويعمل في أجزاء من الثانية على معدات حديثة، مما يجعله مناسباً للتطبيقات شبه الزمن الحقيقي.
من مقاييس المختبر إلى المشاهد الواقعية
على معيار ModelNet40، يتفوق النهج المقترح على كل من الخوارزميات التقليدية المعتمدة على الهندسة والعديد من طرق التعلم العميق الرائدة عبر مقاييس الخطأ القياسية. يعيد تكوين سيارات وكراسي وأسرة بدقة أعلى، لا سيما عندما تكون أكثر من نصف النقاط الأصلية مفقودة. تكشف المقارنات البصرية أن الأسلوب يستعيد مكوّنات هيكلية رئيسية — مثل أسقف السيارات ومساند ظهر الكراسي — التي غالباً ما تفشل الطرق الأخرى في استعادتها. كما يختبر المؤلفون النظام على مسوحات داخلية حقيقية ومشاهد قيادة محاكاة، حيث تكون الانسدادات والضوضاء أكثر حدة بكثير مقارنة بمجموعات البيانات النظيفة. في كلا السياقين، تؤدي سحب النقاط المكتملة إلى خرائط ثلاثية الأبعاد أكثر دقة وتدعم تخطيط مسارات أفضل: مع الهندسة المكتملة، تستطيع خوارزميات التخطيط التنبؤ بالعقبات المخفية واختيار مسارات أكثر سلاسة وأمناً.
صورة أوضح لعوالم ثلاثية الأبعاد
باختصار، توضح هذه الدراسة أن GAN مصممة بعناية يمكنها تعلّم إحكام توافقي ثلاثي الأبعاد قوي واستخدامه لإكمال سحابات نقاط متضررة بشدّة دون الاعتماد على بيانات تدريبية مزدوجة. من خلال دمج مشفّر بسيط ومولد قوي ومميّز فطِن ودالة خسارة مصممة بعناية، ينتج النظام أشكالاً ثلاثية الأبعاد كاملة وناعمة وذات بنية سليمة من مدخلات متناثرة وصاخبة. للقراء غير المتخصصين، الرسالة الرئيسة هي أن الخوارزميات باتت قادرة الآن على «تخمين» المعلومات الثلاثية الأبعاد المفقودة بطريقة واقعية وعملية، مما يساعد الروبوتات والمركبات وأنظمة الواقع الافتراضي على رؤية صورة أكثر اكتمالاً للعالم من حولها.
الاستشهاد: Zhao, D., Mao, S., Shao, J. et al. Generative adversarial networks for high-fidelity 3D point cloud completion. Sci Rep 16, 14076 (2026). https://doi.org/10.1038/s41598-026-44111-5
الكلمات المفتاحية: سحابات نقاط ثلاثية الأبعاد, إكمال الشكل, الشبكات التنافسية التوليدية, الملاحة الذاتية, إدراك الروبوت