Clear Sky Science · zh
无节海洋环节动物作为软体机器人生物力学模型
像活体机器一样伸展的蠕虫
设想一种生物能够将自身长度增加一倍以上、挤过狭窄空间并钻入海床,而全身没有任何关节。该研究考察了这种海洋蠕虫,以揭示简单的力学技巧,帮助工程师制造更柔软、更安全的机器人,用于医疗器械、水下勘探或温和的工业搬运等任务。
简单的身体与巧妙的隐藏套筒
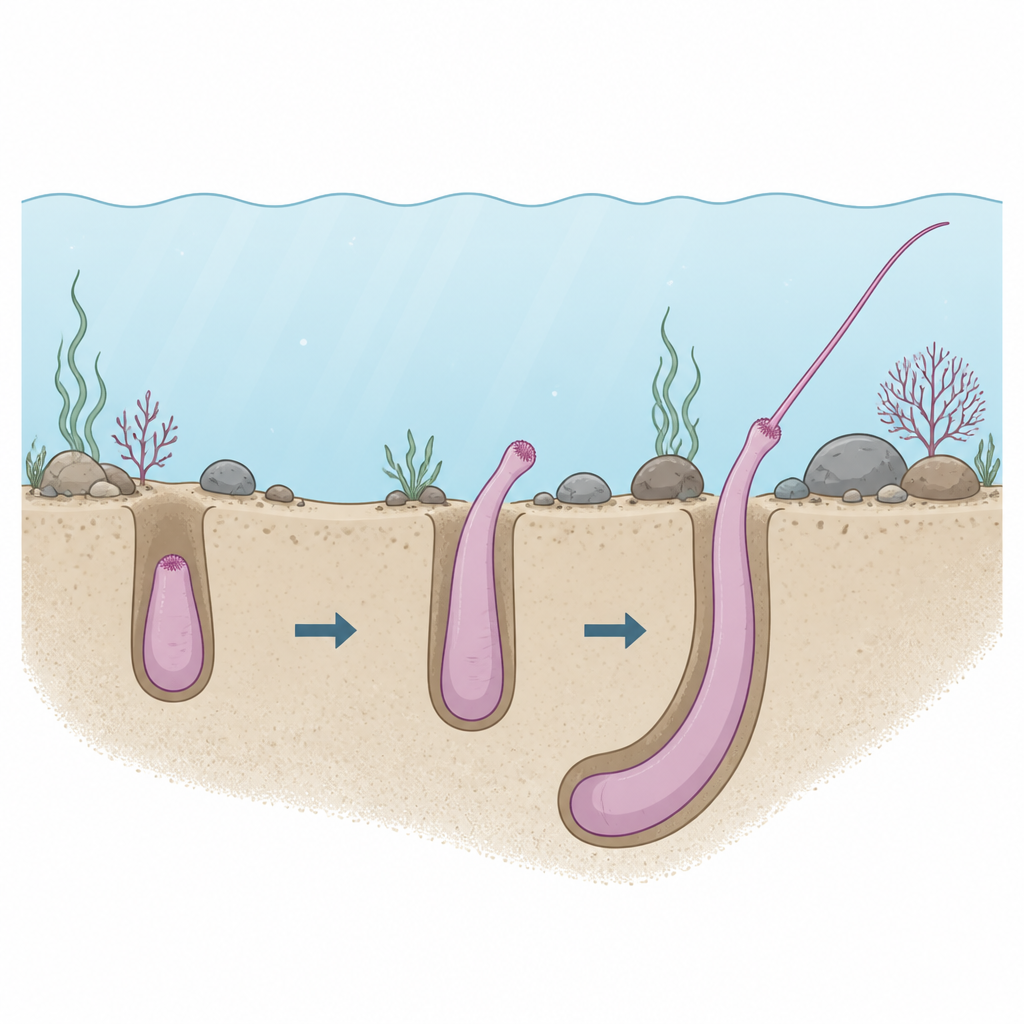
研究者将注意力集中在一种名为Phascolosoma stephensoni的小型海洋蠕虫上。乍看之下它像一根无特征的管子,但内部有一个充满液体的单一腔体,充当基于水的支架。身体有两部分:较粗的躯干容纳器官,前端较细的部分称为内翻器(introvert)。内翻器像一只塞起的套筒,可以翻转并翻出形成长而探查的尖端。研究团队利用高分辨率X射线扫描绘制了蠕虫在不同姿态下的肌肉和内腔,从完全收缩到完全伸展。他们发现躯干在运动中几乎不改变长度,而整体体长可以通过内翻器的翻出和变窄增加一倍以上。
软管如何推动自身前进
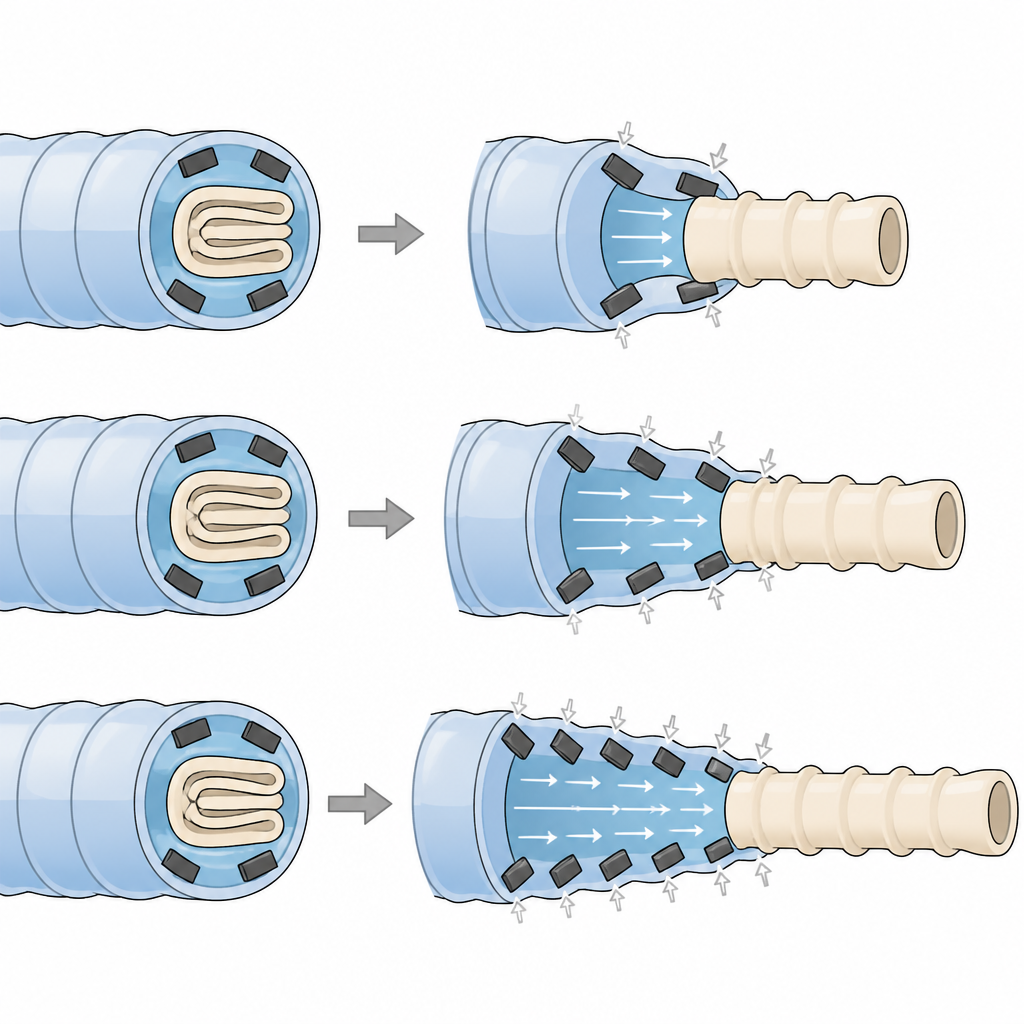
这一技巧的关键在于蠕虫如何利用内部液体和肌肉层。缠绕在躯干表面的环状肌肉将其略微挤细,从而提高腔内压力。由于总体积几乎保持不变,被加压的液体被推向内翻器,迫使其外翻并伸出,有点像从牙膏管里挤出牙膏。连接躯干后部与内翻器尖端的特殊牵引肌则能迅速将其拉回,这在面对捕食者时是有用的防御策略。对组织的机械测试显示,躯干比内翻器能承受更大的伸长和更高的应力,因而更适合作为压力泵,而较硬且呈锥形的内翻器通过翻出而不是大量拉伸来实现可控伸展。
观察蠕虫运动并将运动转为数学模型
为了理解这些动物如何爬行和挖掘,科学家在狭窄、充填凝胶的通道中拍摄活动的蠕虫,这些通道模拟了致密的沙或泥。在这些受限空间中,身体运动近似二维,便于精确测量形状变化和速度。尽管缺乏许多其他蠕虫常见的明显节段,蠕虫仍通过蠕动前进——沿体表发送变窄和变宽的波来逐步推进。团队建立了一个数学模型,将蠕虫视为一根在时空上局部改变长度的连续杆。将此模型与对凝胶阻抗穿透的测量相结合,模拟重现了视频中看到的逐步前进运动,速度与观察到的量级相当,约为每秒0.5至5毫米。
从海床钻掘者到软体机器人
基于这些生物学见解,研究者构建了一个模仿蠕虫液压机制的软体机器人原型。该机器人具有充水的非常柔软的外躯干和一层较薄且较硬的内套筒,模拟内翻器。在躯干周围嵌入了四个含有小型永磁体的硅胶区域。当施加外部磁场时,这些区域向内弯曲,类似人工环状肌,挤压躯干并将水推入内套筒,从而使套筒外翻并突出,机器人长度可扩展到原长的约两倍半。磁场减弱时,柔性弹性条将套筒拉回,类似蠕虫的牵引肌。由于机器人完全由软材料构成并通过磁场无线驱动,它不需要内部电子设备或刚性部件。
这对未来软体机械的重要意义
这项工作表明,一种看似简单的无节蠕虫可以为软体机器人提供丰富的设计指南。通过在真实环境中仔细测量解剖结构、组织力学和运动,研究解释了如何通过一个连续体重新分配内部液体而非依赖关节来产生大幅度形变和爬行。磁驱动的原型证明了这些原理可以被转化为实用装置,仅凭形状、材料和外部场就能实现大幅且可控的伸展。这类方法可能启发用于穿越狭窄空间、在封闭系统内输送液体或根据环境自适应形状的新型软工具,同时保持温和与固有的安全性。
引用: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
关键词: 软体机器人, 海洋蠕虫, 静水支架, 磁驱动, 仿生设计