Clear Sky Science · he
תולעי ים לא מקוטעות כמודלים ביומכניים לרובוטיקה רכה
תולעים המתארכות כמו מכונות חיות
דמיינו יצור שיכול להאריך את עצמו ביותר מפעמיים, להיצמד דרך חריצים צרים ולחפור בקרקעית הים — וכל זאת ללא כל מפרקים. המחקר בוחן תולעים ימיות כאלה כדי לחשוף תחבולות מכניות פשוטות שעשויות לסייע למהנדסים לבנות רובוטים רכים ובטוחים יותר למשימות כמו כלים רפואיים, חקר תת-מימי או טיפול תעשייתי עדין.
גוף פשוט עם שרוול חמקמק
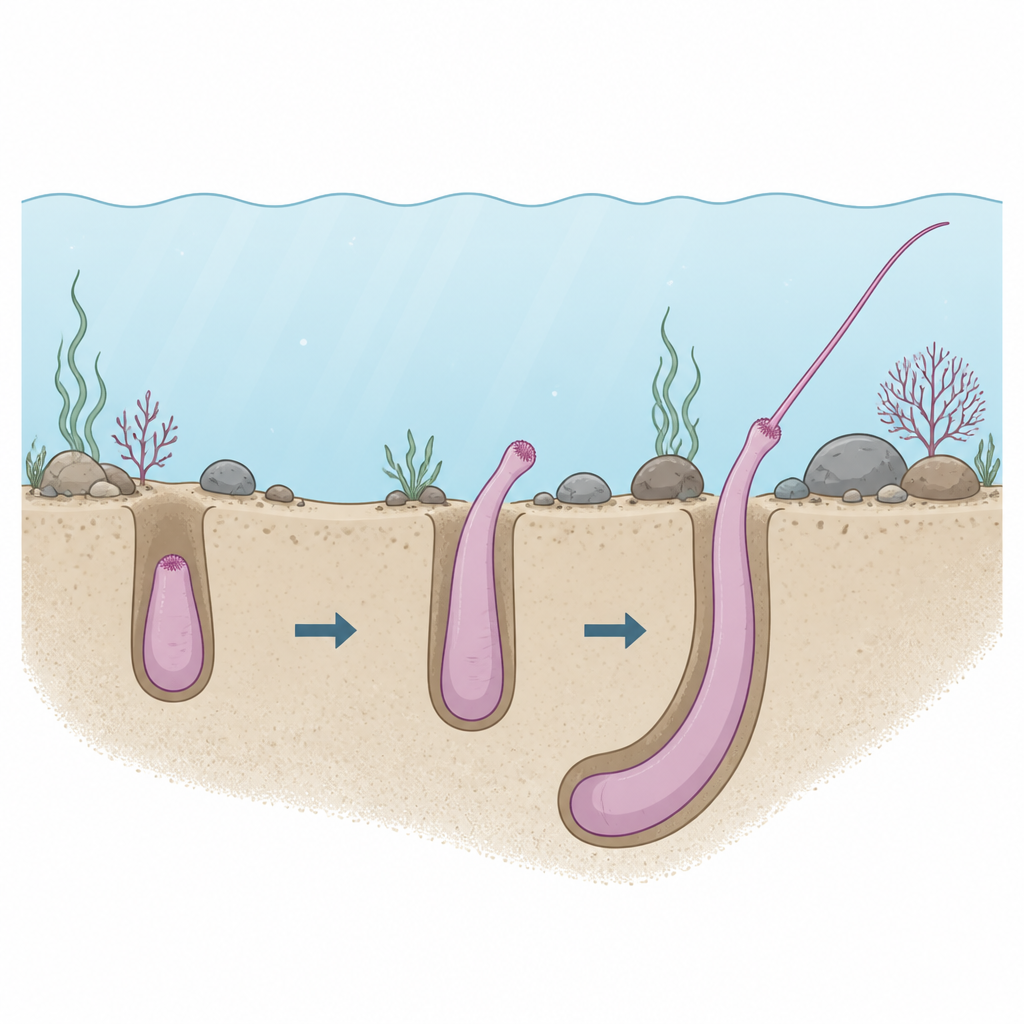
החוקרים התמקדו בתולעת ימיתה קטנה בשם Phascolosoma stephensoni. במבט ראשון היא נראית כצינור חסר תכונות, אך מבפנים יש חלל בודד מלא נוזל המשמש כשלד הידרוסטטי. הגוף מורכב משני חלקים עיקריים: גזע עבה שמכיל את האיברים, ואזור קדמי דק יותר שנקרא אינטרוברט. האינטרוברט מתנהג כמו שרוול מקופל שניתן להמירן כלפי חוץ כדי ליצור קצה חודרני ארוך. באמצעות סריקות רנטגן ברזולוציה גבוהה, הצוות מיפה את השרירים והחלל הפנימי של התולעת בתנוחות שונות, מהתכווצות מלאה ועד התארכות מלאה. הם גילו שהגזע משנה את אורכו במעט בלבד במהלך התנועה, בעוד שאורך הגוף הכולל יכול להימשך ביותר מפעמיים כי האינטרוברט מתגלגל ונהיה צר בעת יציאתו החוצה.
כיצד צינור רך דוחף את עצמו קדימה
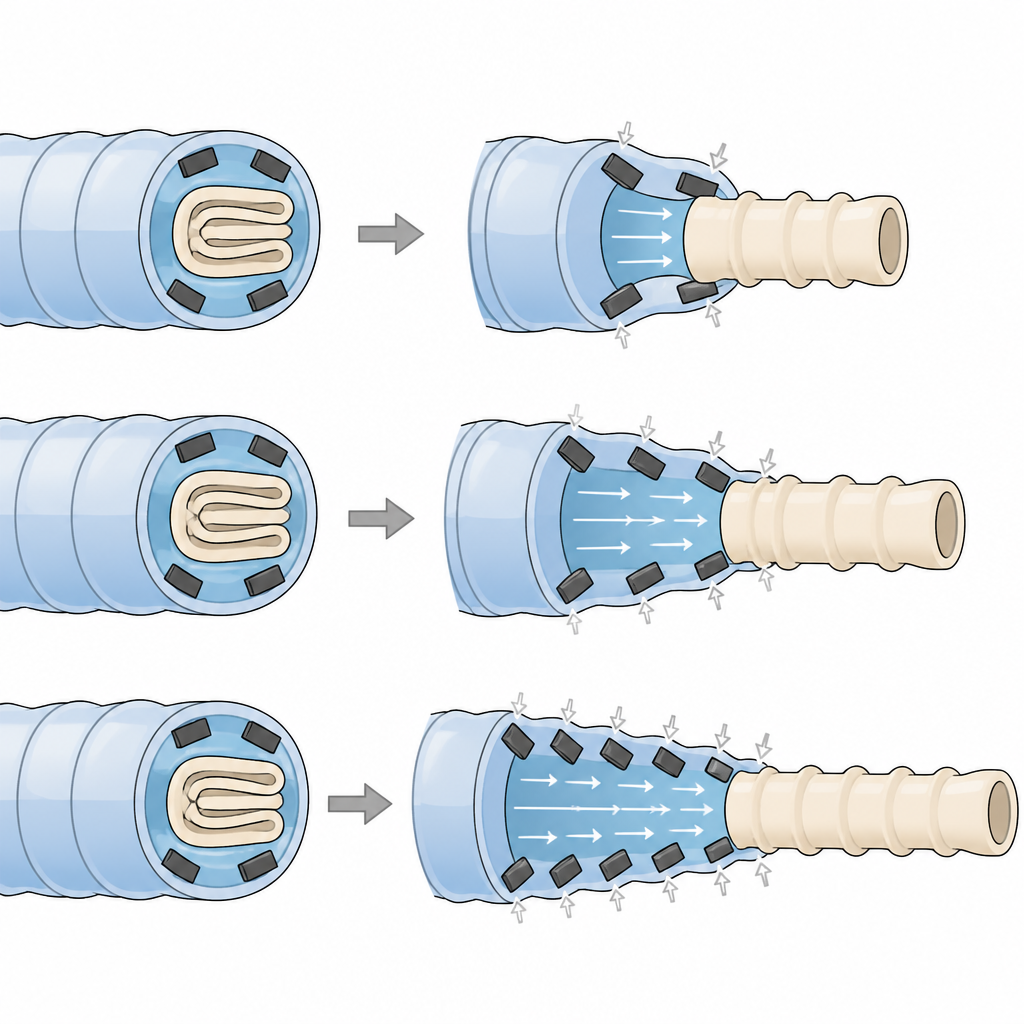
המפתח למהלך הוא השימוש של התולעת בנוזל הפנימי והשכבות השריריות. שרירים מעגליים העוטפים את הגזע לוחצים אותו ומצריכים אותו להיות דק יותר מעט, מה שמעלה את הלחץ הפנימי בנוזל. מאחר ונפח כולל נשאר כמעט קבוע, הנוזל המתקדם נדחק קדימה לתוך האינטרוברט, וכופה עליו להתהפך ולהתארך — בדומה למשחת שיניים היוצאת מתוך שפופרת. שרירי משיכה מיוחדים המתחברים מאחורי הגזע לקצה האינטרוברט מושכים אותו חזרה במהירות, מה שמשמש כהגנה מפני טורפים. בדיקות מכניות של הרקמות הראו שהגזע יכול להימתח יותר מהאינטרוברט ולסבול מאמצים גבוהים יותר, מה שהופך אותו למתאים כתא דחיפה בלחץ, בעוד שהאינטרוברט הקשיח יותר ובעל צורת חרוט מתאים יותר להארכה מבוקרת באמצעות גלגול ולא באמצעות מתיחה כבדה.
צפייה בתנועה והמרת תנועה למתמטיקה
כדי להבין כיצד בעלי החיים הללו זוחלים וחופרים, המדענים צילמו תולעים חיות שנעו בערוצים צרים מלאים ג'ל המדמים חול או בוץ דחוסים. במרחבים המוגבלים הללו תנועת הגוף כמעט דו-ממדית, מה שאיפשר מדידות מדויקות של שינויי צורה ומהירויות. התולעים נעו בעזרת פריסטלטיקה, שידרו גלים של הצרות והתרחבות לאורך גופן כדי לזוז קדימה, אף על פי שחסרות להן הסגמנטים המובהקים שיש לתולעים רבות אחרות. הצוות בנה מודל מתמטי שמתייחס לתולעת כאל מוט רציף שאורכו משתנה מקומית בזמן ובמרחב. בשילוב עם מדידות של ההתנגדות שהג'ל מציע לחודרנות, המודל החזיר את התנועה הצעדית קדימה שהופיעה בסרטונים, עם מהירויות דומות של בערך חצי עד חמש מילימטרים לשנייה.
מצמיחת חופר קרקעית הים לרובוט רך
מוליכי הביולוגיה הללו הובילו את החוקרים לבנות אב-טיפוס רובוטי רך שמחקה את תחבולת ההידראוליקה של התולעת. לרובוט גזע חיצוני רך מאוד מלא במים ושרוול פנימי דק וקשיח יותר שמעתיק את האינטרוברט. סביב הגזע השלימו ארבעה אזורי סיליקון המכילים מגנטים קבועים זעירים. כאשר מוחל שדה מגנטי חיצוני, אזורים אלה מתעקמים פנימה כמו שרירים מעגליים מלאכותיים, לוחצים את הגזע ודוחפים מים לשרוול הפנימי. זה גורם לשרוול להתהפך ולהתבלט, ולהאריך את הרובוט לכ־2.5 פעמים אורכו המקורי. כשהשדה מופחת, רצועות אלסטיות רכות מושכות את השרוול חזרה, בדומה לשרירי המשיכה של התולעת. מאחר והרובוט רך לחלוטין ומונע באלחוט על ידי מגנטיות, אין בו אלקטרוניקה פנימית או חלקים קשיחים.
מדוע הדבר חשוב לרכבים רכים בעתיד
העבודה מראה שתולעת לכאורה פשוטה וללא פרקים יכולה לספק מדריך עיצוב עשיר לרובוטיקה רכה. באמצעות מדידות קפדניות של אנטומיה, מכניקת רקמות ותנועה בסביבות מציאותיות, המחקר מסביר כיצד שינויים גדולים בצורה וזחילה יכולים לנבוע מגוף רציף שמפזר נוזל פנימי במקום להסתמך על מפרקים. האב-טיפוס המונע מגנטית מוכיח שניתן לתרגם עקרונות אלה למכשיר מעשי המסוגל להארכה גדולה ומבוקרת באמצעות צורה, חומרים ושדה חיצוני בלבד. גישות כאלה יכולות להניע רעיונות לכלים רכים חדשים המנווטים במקומות צרים, משאבים נוזליים בתוך מערכות סגורות או מתאימים את צורתם בהתאם לסביבה — והכל תוך שמירה על עדינות ובטיחות טבעית.
ציטוט: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
מילות מפתח: רובוטיקה רכה, תולעי ים, שלד הידרוסטטי, הנעה מגנטית, עיצוב בהשראת ביולוגיה