Clear Sky Science · nl
Ongeïnviseerde mariene anneliden als biomechanische modellen voor zachte robotica
Wormen die zich uitstrekken als levende machines
Stel je een organisme voor dat zijn lengte meer dan kan verdubbelen, door nauwe spleten kan kruipen en zich in de zeebodem kan ingraven — en dat alles zonder gewrichten. Deze studie onderzoekt zulke mariene wormen om eenvoudige mechanische trucs bloot te leggen die ingenieurs kunnen helpen zachtere, veiligere robots te bouwen voor toepassingen zoals medische instrumenten, onderwaterverkenning of zacht industrieel hanteren.
Een eenvoudig lichaam met een slimme verborgen mouw
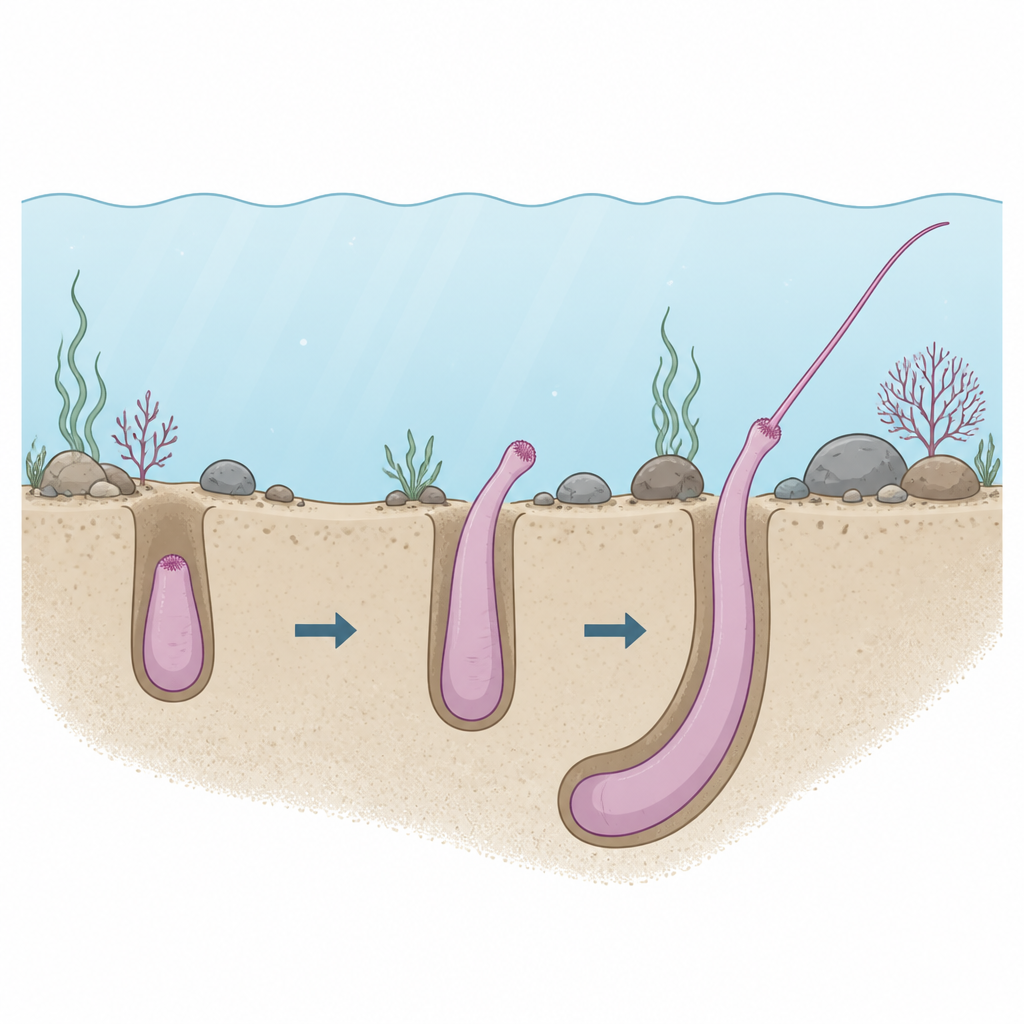
De onderzoekers concentreerden zich op een kleine zeeworm genaamd Phascolosoma stephensoni. Op het eerste gezicht lijkt het een kenmerkloze buis, maar van binnen heeft hij een enkele met vloeistof gevulde holte die fungeert als een waterachtig skelet. Het lichaam heeft twee hoofdsecties: een dikkere romp waarin de organen zitten, en een dunnere voorste streek die de introvert wordt genoemd. De introvert werkt als een ingestopte mouw die binnenstebuiten gekeerd kan worden om een lange, tastende punt te vormen. Met hoogresolutie röntgenscans bracht het team de spieren en de binnenholte van de worm in kaart in verschillende houdingen, van volledig ingetrokken tot volledig uitgestrekt. Ze vonden dat de romp tijdens beweging nauwelijks van lengte verandert, terwijl de totale lichaamslengte meer dan kan verdubbelen doordat de introvert uitrolt en vernauwt terwijl hij naar buiten komt.
Hoe een zachte buis zich naar voren duwt
De sleutel tot deze truc is hoe de worm zijn interne vloeistof en spierlagen gebruikt. Cirkelvormige spieren die om de romp gewikkeld zijn knijpen deze iets dunner, wat de interne druk in de vloeistof verhoogt. Omdat het totale volume vrijwel constant blijft, wordt die onder druk staande vloeistof naar voren in de introvert geduwd, waardoor deze uitkeert en zich uitstrekt — vergelijkbaar met tandpasta die een tube verlaat. Speciale retractorspieren die van de achterkant van de romp naar de punt van de introvert lopen, trekken die vervolgens snel weer terug; een nuttige verdediging tegen roofdieren. Mechanische testen van de weefsels toonden aan dat de romp meer kan uitrekken dan de introvert en hogere spanningen kan weerstaan, waardoor hij goed dienstdoet als drukpomp, terwijl de stijvere, kegelvormige introvert zich beter leent voor gecontroleerde verlenging door uitrollen in plaats van door sterke rek.
Wormen filmen en beweging in wiskunde vertalen
Om te begrijpen hoe deze dieren kruipen en graven, filmden de wetenschappers levende wormen die door smalle, met gel gevulde kanalen bewogen die dicht opeengepakte zand- of modderlagen nabootsen. In deze beperkte ruimtes is de lichaamsbeweging bijna tweedimensionaal, wat nauwkeurige metingen van vormveranderingen en snelheden mogelijk maakte. De wormen bewogen door peristaltiek: ze stuurden golven van vernauwing en verbreding langs hun lichaam om zich voort te werken, ook al missen ze de uitgesproken segmenten die veel andere wormen wel hebben. Het team bouwde een wiskundig model dat de worm behandelt als een continu staafje waarvan de lengte lokaal in tijd en ruimte verandert. Door dit te combineren met metingen van hoe de gel penetratie weerstaat, reproduceerde het model de stapsgewijze voorwaartse beweging die in de video's te zien was, met vergelijkbare snelheden van ongeveer een halve tot vijf millimeter per seconde.
Van zeebodemgraver naar zachte robot
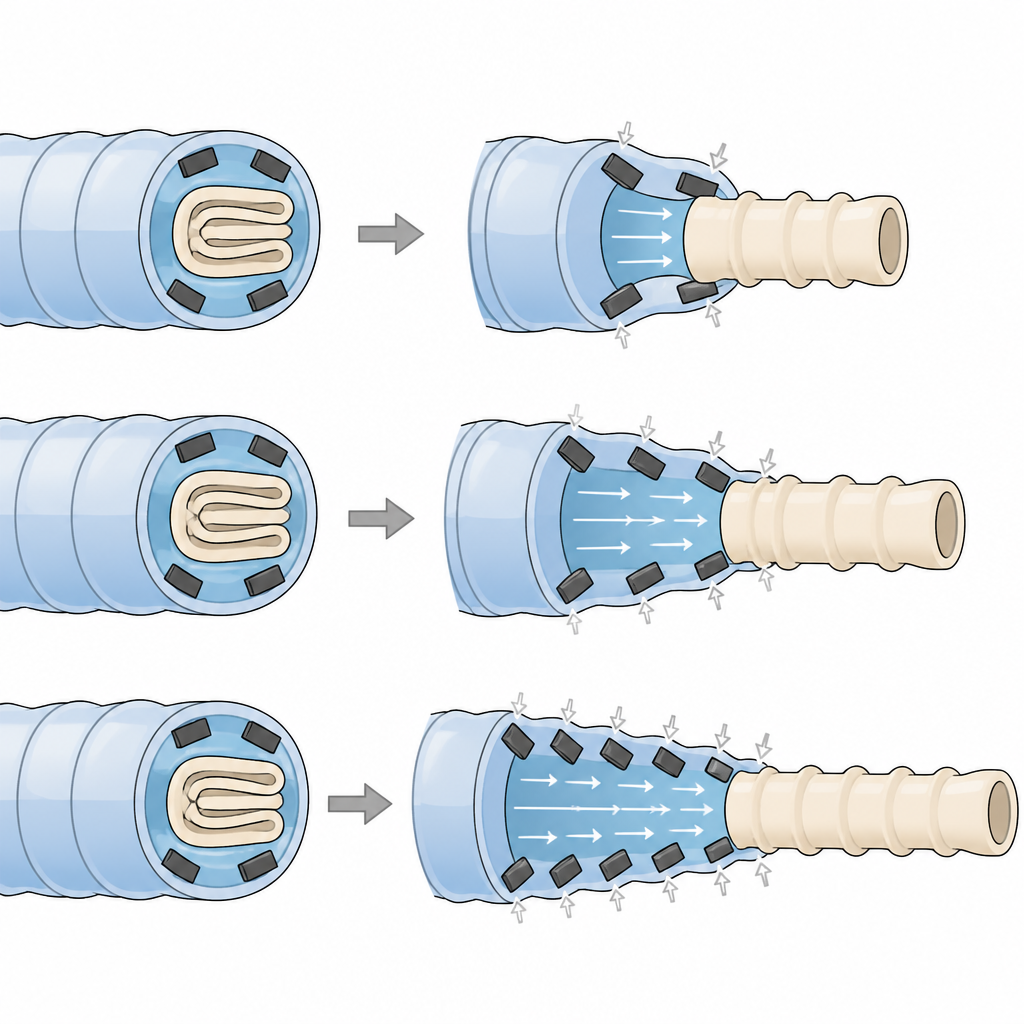
Met dit biologische inzicht bouwden de onderzoekers een zacht robotprototype dat de hydraulische truc van de worm nabootst. De robot heeft een zeer zachte buitenromp gevuld met water en een dunne, stijvere binnenmouw die de introvert imiteert. Rondom de romp plaatsten ze vier siliconen zones met kleine permanente magneten. Wanneer een extern magnetisch veld wordt aangelegd, buigen deze zones naar binnen als kunstmatige cirkelvormige spieren, knijpen de romp samen en duwen water in de binnenmouw. Dit veroorzaakt het uitkeren en naar buiten steken van de mouw, waardoor de robot zich ongeveer tweeënhalf keer zijn oorspronkelijke lengte kan uitstrekken. Als het veld wordt verminderd, trekken zachte elastische strippen de mouw terug, vergelijkbaar met de retractorspieren van de worm. Omdat de robot volledig zacht is en draadloos door magnetisme wordt aangedreven, heeft hij geen interne elektronica of starre onderdelen nodig.
Waarom dit belangrijk is voor toekomstige zachte machines
Dit werk laat zien dat een ogenschijnlijk eenvoudige, ongesegmenteerde worm een rijke ontwerpwijzer kan bieden voor zachte robotica. Door nauwkeurig anatomie, weefselmechanica en beweging in realistische omgevingen te meten, verklaart de studie hoe grote vormveranderingen en kruipen kunnen ontstaan uit een continu lichaam dat interne vloeistof herschikt in plaats van op gewrichten te vertrouwen. Het magnetisch aangedreven prototype toont aan dat deze principes naar een praktisch apparaat vertaald kunnen worden dat met alleen vorm, materialen en een extern veld grote, gecontroleerde verlengingen kan realiseren. Dergelijke benaderingen kunnen nieuwe zachte hulpmiddelen inspireren die zich door nauwe ruimtes navigeren, vloeistoffen in afgesloten systemen verpompen of hun vorm aanpassen aan de omgeving — allemaal terwijl ze zacht en intrinsiek veilig blijven.
Bronvermelding: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
Trefwoorden: zachte robotica, zeewormen, hydrostatisch skelet, magnetische aandrijving, bio-geïnspireerd ontwerp