Clear Sky Science · tr
Eklemsiz deniz halkalıları yumuşak robotik için biyomekanik modeller olarak
Yaşayan makineler gibi uzayan solucanlar
Düşünün ki eklemi olmayan, uzunluğunu iki kattan fazla artırabilen, dar aralıklardan geçebilen ve deniz tabanına kazınabilen bir canlı var. Bu çalışma, tıp araçları, sualtı keşfi veya nazik endüstriyel tutma gibi görevler için daha yumuşak, daha güvenli robotlar tasarlamaya yardımcı olabilecek basit mekanik hileleri ortaya çıkarmak için böyle deniz solucanlarını inceliyor.
Zeki, gizli bir kılıf içeren basit bir vücut
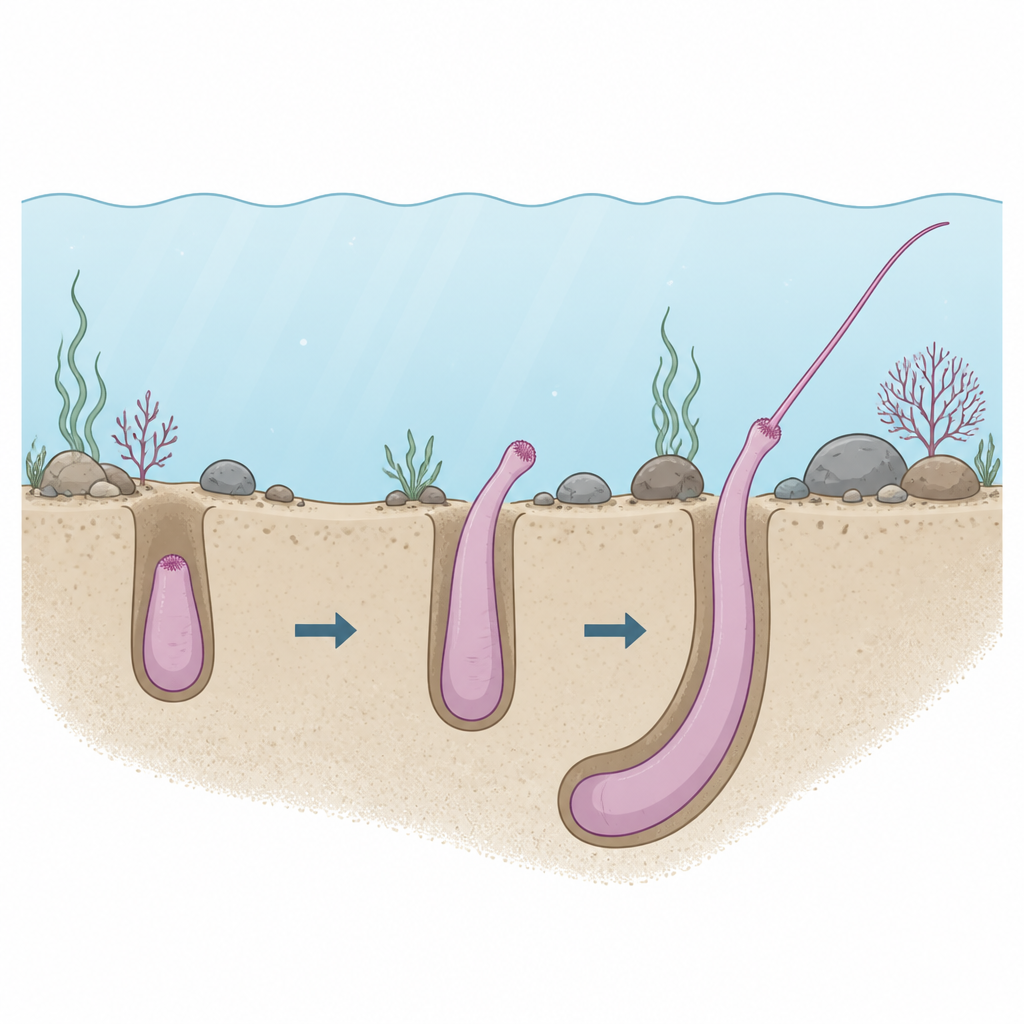
Araştırmacılar Phascolosoma stephensoni adlı küçük bir deniz solucanına odaklandı. İlk bakışta özelliği olmayan bir tüp gibi görünse de içinde su bazlı bir iskelet görevi gören tek bir sıvı dolu boşluk bulunur. Vücut iki ana kısımdan oluşur: organları barındıran daha kalın bir gövde (trunk) ve introvert adı verilen daha ince bir ön bölüm. Introvert, uzun bir araştırma ucu oluşturmak üzere ters çevrilebilen içe sokulmuş bir kılıf gibi davranır. Yüksek çözünürlüklü X-ışını taramalarıyla ekip, solucanın tamamen içeri çekilmişten tamamen çıkmış duruma kadar farklı pozlardaki kaslarını ve iç boşluğunu haritaladı. Hareket sırasında gövdenin uzunluğunun neredeyse hiç değişmediğini, oysa toplam vücut uzunluğunun introvert dışarı çıktıkça açılıp daralması nedeniyle iki kattan fazla artabileceğini buldular.
Yumuşak bir tüpün kendini öne itme yolu
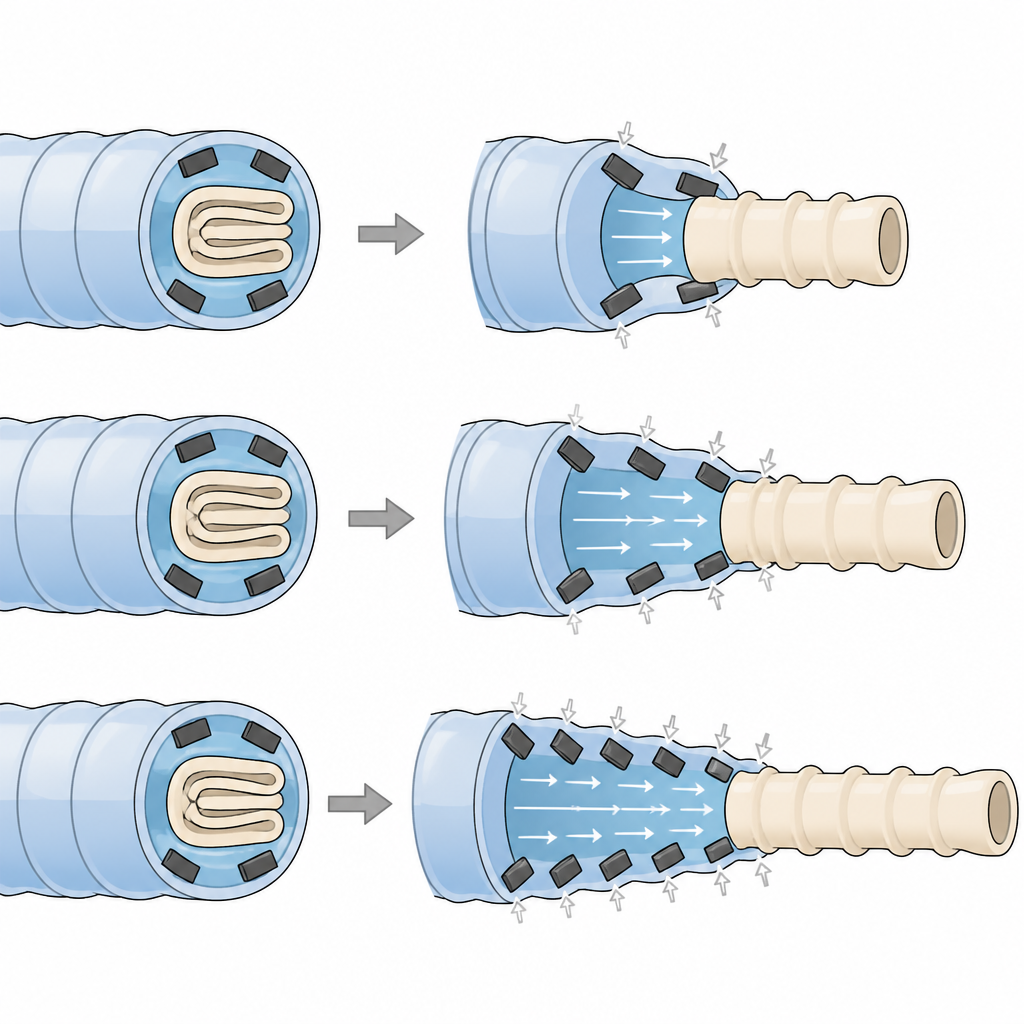
Bu numaranın anahtarı solucanın iç sıvısını ve kas katmanlarını nasıl kullandığında yatıyor. Gövdeyi çevreleyen dairesel kaslar gövdeyi biraz daha ince sıkıştırır; bu da iç sıvıda basıncı yükseltir. Toplam hacim neredeyse sabit kaldığı için basınçlı sıvı introverta doğru itilir ve onun tersi çıkarak uzanmasını sağlar—diş macunu tüpten çıkarken olduğu gibi. Gövdenin arkasından introvertin ucuna kadar uzanan özel retractor (geri çekme) kasları ise ucu hızla içeri çekerek yırtıcılara karşı etkili bir savunma sağlar. Doku üzerine yapılan mekanik testler, gövdenin introvertten daha fazla esneyebildiğini ve daha yüksek gerilmelere dayanabildiğini gösterdi; bu da gövdeyi bir basınç pompası olarak uygun kılıyor. Daha sert, konik şekilli introvert ise ağır gerilme yerine açılarak kontrollü uzama için daha elverişli bulunuyor.
Solucanların hareketini izlemek ve hareketi matematiğe dönüştürmek
Bu hayvanların nasıl emeklediğini ve kazdığını anlamak için bilim insanları, canlı solucanları sıkışık kum veya çamuru taklit eden dar, jel dolu kanallarda hareket ederken filme aldı. Bu sınırlı alanlarda vücut hareketi neredeyse iki boyutlu olduğundan şekil değişimleri ve hızlar hassas biçimde ölçülebildi. Solucanlar, diğer birçok solucanda görülen belirgin bölümlere sahip olmamalarına rağmen peristaltik hareket kullanarak ilerledi: öne doğru daralan ve genişleyen dalgalar göndererek yol aldı. Ekip, solucanı uzunluğu zaman ve mekânda yerel olarak değişen sürekli bir çubuk gibi ele alan matematiksel bir model kurdu. Bunu jelin penetrasyona karşı gösterdiği direnç ölçümleriyle birleştirerek model, videolarda görülen adım adım ileri hareketi ve yaklaşık yarım ila beş milimetre/saniye aralığındaki benzer hızları yeniden üretti.
Deniz tabanı delicisinden yumuşak robota
Bu biyolojik içgörüyle donanan araştırmacılar, solucanın hidrolik hilesini taklit eden bir yumuşak robot prototipi inşa ettiler. Robotun çok yumuşak, suyla dolu bir dış gövdesi ve introverti kopyalayan ince, daha sert bir iç kılıfı var. Gövde etrafına dört bölge halinde küçük kalıcı mıknatıslar içeren silikon yerleştirildi. Harici bir manyetik alan uygulandığında bu bölgeler yapay dairesel kaslar gibi içe doğru bükülerek gövdeyi sıkar ve suyu iç kılıfa iterek kılıfın ters çevrilip çıkmasını sağlar. Bu, robotun uzunluğunu yaklaşık iki buçuk katına kadar uzatır. Alan azaltıldığında, solucanın retractor kaslarına benzer şekilde yumuşak elastik şeritler kılıfı geri çekiyor. Robot tamamen yumuşak ve manyetizma ile kablosuz olarak çalıştığı için iç elektronik veya sert parçalar gerektirmiyor.
Geleceğin yumuşak makineleri için önemi
Bu çalışma, görünürde basit, eklemsiz bir solucanın yumuşak robotik için zengin bir tasarım rehberi sağlayabileceğini gösteriyor. Anatomiyi, doku mekaniklerini ve gerçekçi ortamlardaki hareketi dikkatle ölçerek çalışma, büyük şekil değişiklikleri ve emeklemenin eklemlere dayanmayan, iç sıvıyı yeniden dağıtan sürekli bir vücuttan nasıl ortaya çıkabileceğini açıklıyor. Manyetik olarak çalışan prototip, yalnızca şekil, malzemeler ve harici bir alan kullanarak büyük, kontrollü uzamaların pratik bir cihaza dönüştürülebileceğini kanıtlıyor. Bu yaklaşımlar, dar alanlarda gezinme, kapalı sistemlerde sıvı pompalama veya çevreye göre şekil uyarlama gibi yeteneklere sahip, aynı zamanda nazik ve doğuştan güvenli yeni yumuşak araçlar için ilham verebilir.
Atıf: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
Anahtar kelimeler: yumuşak robotik, deniz solucanları, hidrostatik iskelet, manyetik tahrik, biyoilhamlı tasarım