Clear Sky Science · pl
Nieposegmentowane morskie pierścienice jako modele biomechaniczne dla miękkiej robotyki
Robaki, które rozciągają się jak żywe maszyny
Wyobraź sobie stworzenie, które potrafi zwiększyć swoją długość ponad dwukrotnie, przeciskać się przez wąskie szczeliny i kopać w dnie morskim, a wszystko to bez żadnych stawów. W tym badaniu analizowano takie morskie robaki, by odsłonić proste triki mechaniczne, które mogą pomóc inżynierom w budowie miększych, bezpieczniejszych robotów do zastosowań takich jak narzędzia medyczne, badania podwodne czy delikatne operacje przemysłowe.
Proste ciało z pomysłowym ukrytym rękawem
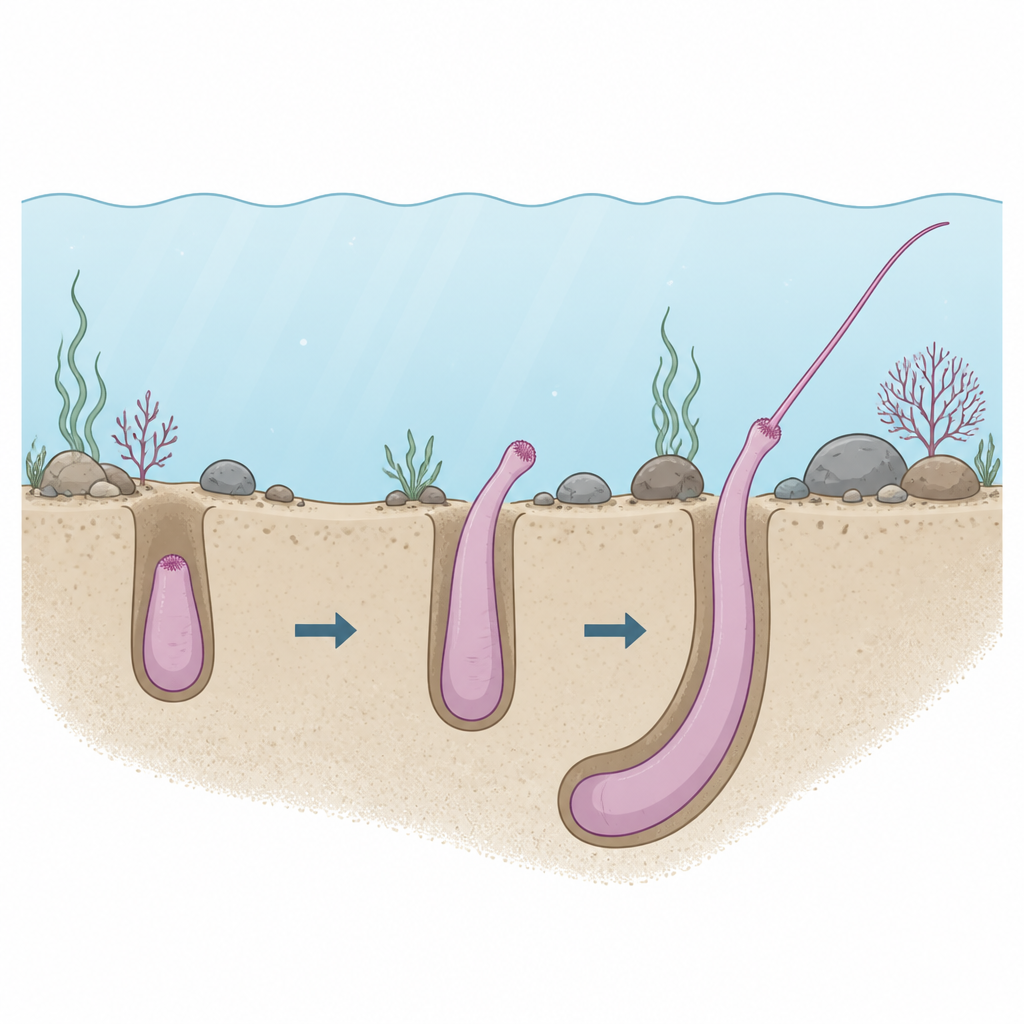
Naukowcy skupili się na małym morskim robaku o nazwie Phascolosoma stephensoni. Na pierwszy rzut oka wygląda jak bezkształtna rurka, jednak wewnątrz ma jedną jamę wypełnioną płynem, działającą jako wodny szkielet. Ciało składa się z dwóch głównych części: grubszej tułowia mieszczącego organy oraz cieńszego przedniego obszaru zwanego introvertą. Introverta zachowuje się jak schowany rękaw, który można wywinąć na zewnątrz, tworząc długi, sondowy koniec. Dzięki wysokorozdzielczym skanom rentgenowskim zespół odwzorował mięśnie i wewnętrzną jamę robaka w różnych pozach, od całkowicie schowanej po w pełni wysuniętą. Stwierdzili, że tułów niemal nie zmienia długości podczas ruchu, podczas gdy całkowita długość ciała może się więcej niż podwoić, ponieważ introverta rozwija się i zwęża w miarę wysuwania.
Jak miękka rurka przesuwa się do przodu
Klucz do tego triku tkwi w sposobie, w jaki robak wykorzystuje swój płyn wewnętrzny i warstwy mięśni. Mięśnie okrężne owinięte wokół tułowia nieznacznie ściskają go, co podnosi ciśnienie wewnątrz płynu. Ponieważ całkowita objętość pozostaje w przybliżeniu stała, zwiększone ciśnienie wypycha płyn do przodu, do introverty, zmuszając ją do ewersji i wydłużenia — podobnie jak pasta wychodząca z tubki. Specjalne mięśnie retraktorowe biegnące od tylnej części tułowia do końca introverty szybko go cofają, co stanowi skuteczną obronę przed drapieżnikami. Testy mechaniczne tkanek wykazały, że tułów może się rozciągać bardziej niż introverta i wytrzymywać większe naprężenia, dzięki czemu dobrze pełni funkcję tłoka ciśnieniowego, podczas gdy sztywniejsza, stożkowata introverta lepiej sprawdza się przy kontrolowanym wysuwaniu przez rozwijanie, a nie intensywne rozciąganie.
Obserwacje ruchu i opis matematyczny
Aby zrozumieć, jak te zwierzęta pełzają i kopią, naukowcy filmowali żywe robaki poruszające się przez wąskie kanały wypełnione żelem, imitujące zbite piaski lub muł. W takich ograniczonych przestrzeniach ruch ciała jest niemal dwuwymiarowy, co pozwala na precyzyjne pomiary zmian kształtu i prędkości. Robaki poruszały się wykorzystując perystaltykę — wysyłając wzdłuż ciała fale zwężania i rozszerzania, by posuwać się naprzód, mimo że nie mają wyraźnych segmentów charakterystycznych dla wielu innych robaków. Zespół stworzył model matematyczny traktujący robaka jako ciągły pręt, którego długość zmienia się lokalnie w czasie i przestrzeni. Po połączeniu tego podejścia z pomiarami oporu żelu model odtworzył stopniowy ruch do przodu widoczny na filmach, z podobnymi prędkościami rzędu od około pół do pięciu milimetrów na sekundę.
Z kopacza dna morskiego do miękkiego robota
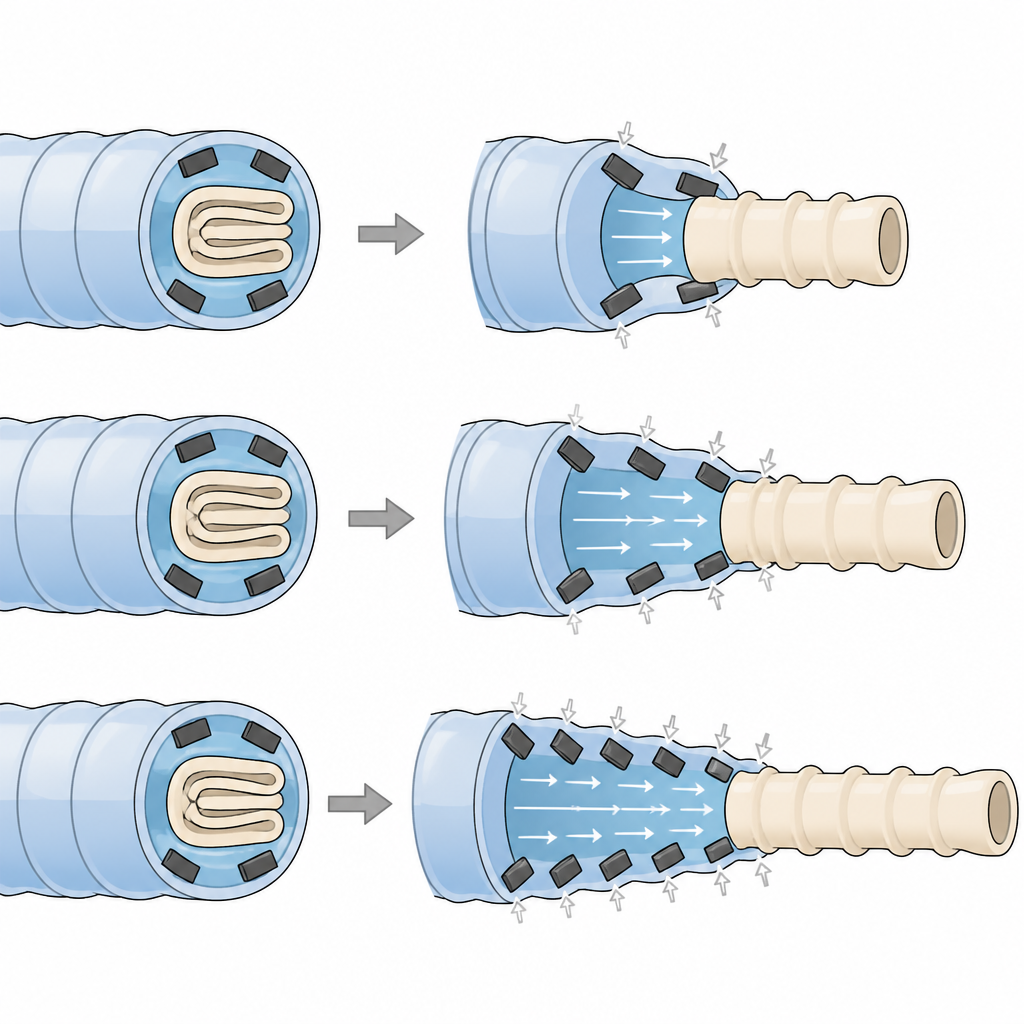
Wykorzystując te biologiczne obserwacje, badacze zbudowali prototyp miękkiego robota wzorowany na hydrodynamicznym tricku robaka. Robot ma bardzo miękki zewnętrzny tułów wypełniony wodą oraz cienki, sztywniejszy wewnętrzny rękaw naśladujący introvertę. Wokół tułowia umieścili cztery obszary silikonu zawierające drobne trwałe magnesy. Po zastosowaniu zewnętrznego pola magnetycznego te obszary wyginają się do wewnątrz jak sztuczne mięśnie okrężne, ściskając tułów i przepychając wodę do wewnętrznego rękawa. To powoduje ewersję rękawa i jego wysunięcie, wydłużając robota do około dwóch i pół raza jego pierwotnej długości. Gdy pole jest zmniejszane, miękkie elastyczne paski chowają rękaw z powrotem, podobnie jak mięśnie retraktorowe robaka. Ponieważ robot jest w całości miękki i napędzany bezprzewodowo przez magnetyzm, nie wymaga wewnętrznej elektroniki ani sztywnych części.
Znaczenie dla przyszłych miękkich maszyn
Ta praca pokazuje, że pozornie prosty, nieposegmentowany robak może dostarczyć bogatych wskazówek projektowych dla miękkiej robotyki. Poprzez staranne pomiary anatomii, mechaniki tkanek i ruchu w realistycznych środowiskach, badanie wyjaśnia, jak duże zmiany kształtu i pełzanie mogą wynikać z ciągłego ciała, które redystrybuuje płyn wewnętrzny zamiast polegać na stawach. Magnetycznie napędzany prototyp dowodzi, że te zasady można przekuć w praktyczne urządzenie zdolne do dużego, kontrolowanego wydłużenia wykorzystując jedynie kształt, materiały i zewnętrzne pole. Takie podejścia mogą zainspirować nowe miękkie narzędzia, które poruszają się w wąskich przestrzeniach, tłoczą płyny w zamkniętych systemach lub dostosowują kształt w odpowiedzi na otoczenie, pozostając jednocześnie delikatne i z natury bezpieczne.
Cytowanie: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
Słowa kluczowe: miękka robotyka, robaki morskie, szkielet hydrostatyczny, napęd magnetyczny, projekt inspirowany biologią