Clear Sky Science · en
Unsegmented marine annelids as biomechanical models for soft robotics
Worms that stretch like living machines
Imagine a creature that can more than double its length, squeeze through tight spaces, and dig into the seafloor, all without any joints. This study looks at such marine worms to uncover simple mechanical tricks that could help engineers build softer, safer robots for tasks like medical tools, underwater exploration, or gentle industrial handling.
A simple body with a clever hidden sleeve
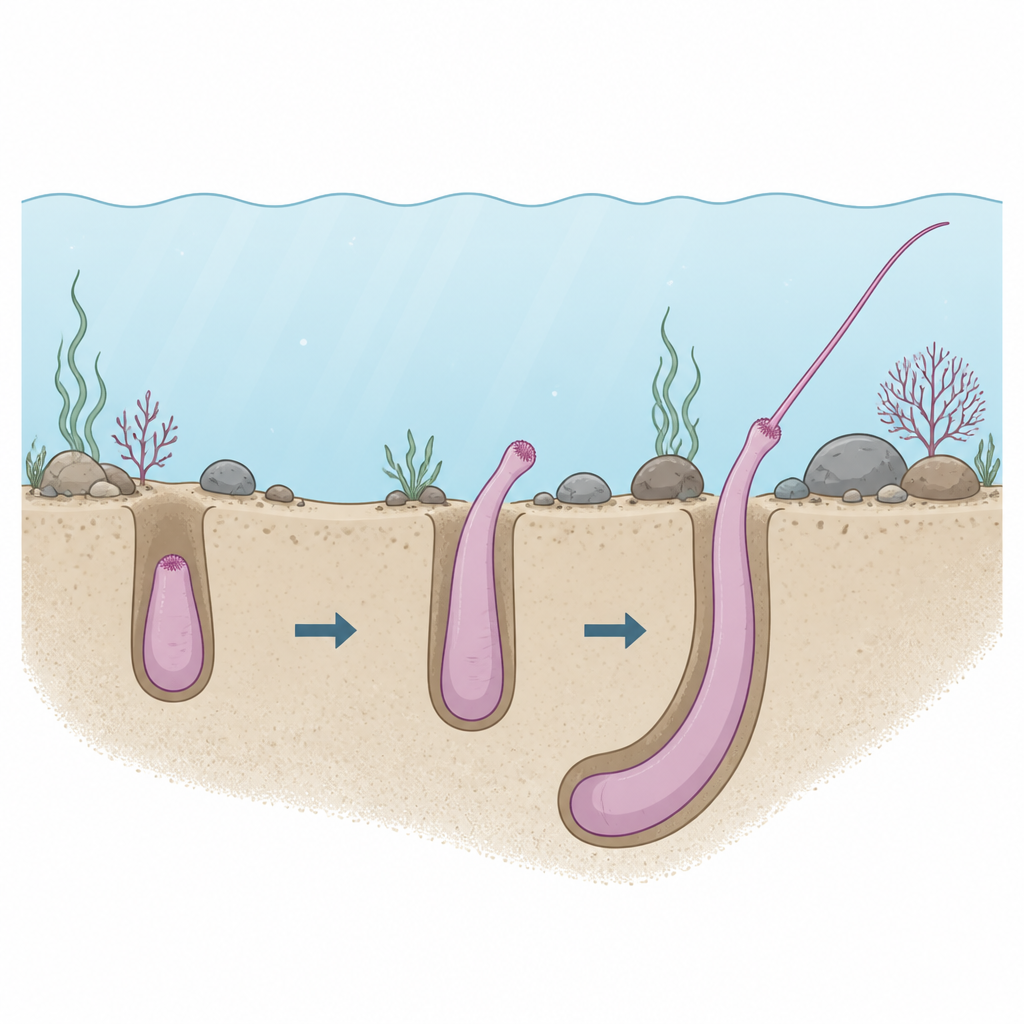
The researchers focused on a small marine worm called Phascolosoma stephensoni. At first glance it looks like a featureless tube, but inside it is a single fluid-filled cavity acting as a water-based skeleton. The body has two main parts: a thicker trunk that houses the organs, and a thinner front region called the introvert. The introvert behaves like a tucked-in sleeve that can be turned inside out to form a long, probing tip. Using high-resolution X-ray scans, the team mapped the worm’s muscles and inner cavity in different poses, from fully retracted to fully extended. They found that the trunk hardly changes length during movement, while total body length can more than double because the introvert unrolls and narrows as it comes out.
How a soft tube pushes itself forward
The key to this trick is how the worm uses its internal fluid and layers of muscle. Circular muscles wrapped around the trunk squeeze it slightly thinner, which raises the internal pressure in the fluid. Because the total volume stays nearly constant, that pressurized fluid is pushed forward into the introvert, forcing it to evert and extend, much like toothpaste leaving a tube. Special retractor muscles running from the back of the trunk to the tip of the introvert then pull it back in quickly, a useful defense against predators. Mechanical tests on the tissues showed that the trunk can stretch more than the introvert and withstand higher stresses, making it well suited as a pressure pump, while the stiffer, cone-shaped introvert is better for controlled extension by unrolling rather than by heavy stretching.
Watching worms move and turning motion into math
To understand how these animals crawl and dig, the scientists filmed live worms moving through narrow, gel-filled channels that mimic packed sand or mud. In these confined spaces the body’s motion is nearly two-dimensional, allowing precise measurements of shape changes and speeds. The worms moved using peristalsis, sending waves of narrowing and widening along their bodies to inch forward, even though they lack the distinct segments many other worms have. The team built a mathematical model that treats the worm as a continuous rod whose length changes locally in time and space. By combining this with measurements of how the gel resists penetration, the model reproduced the stepwise forward motion seen in videos, with similar speeds of roughly half to five millimeters per second.
From seafloor burrower to soft robot
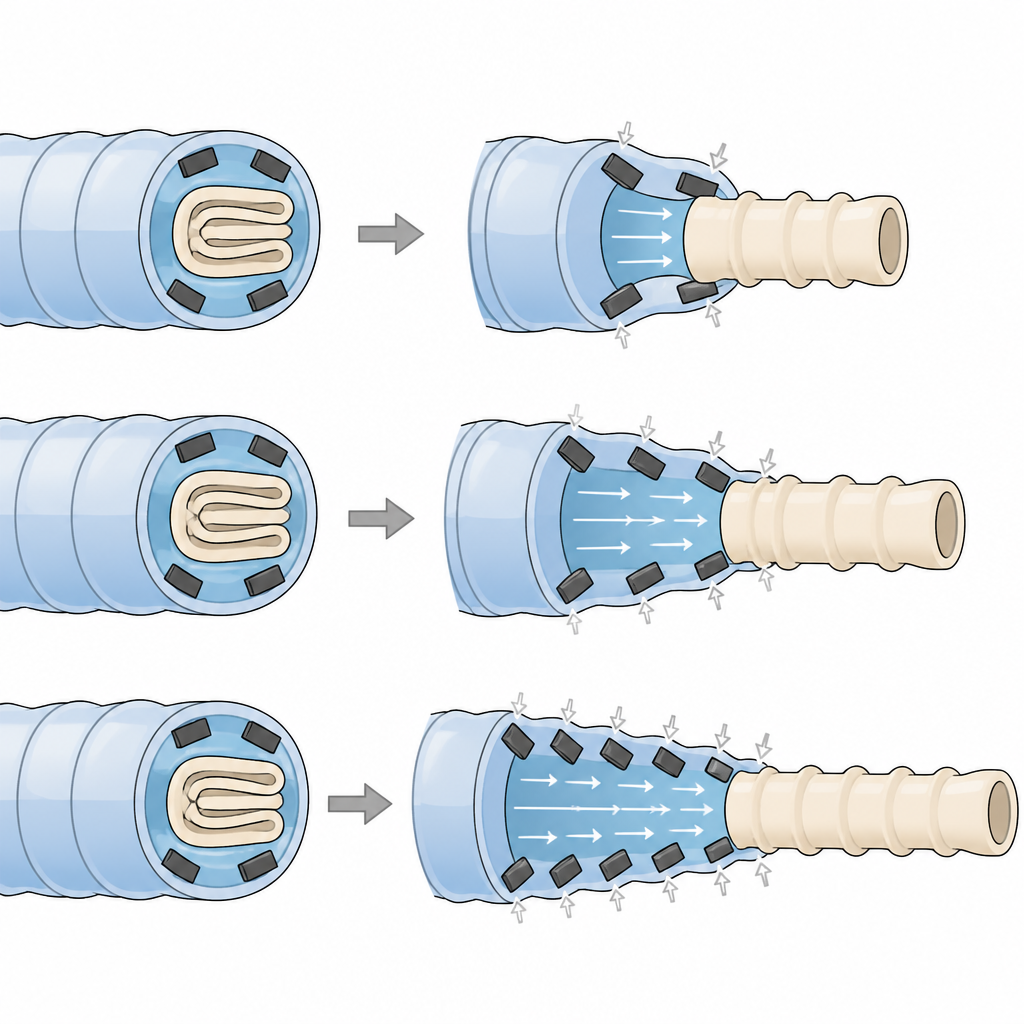
Armed with this biological insight, the researchers built a soft robotic prototype that mimics the worm’s hydraulic trick. The robot has a very soft outer trunk filled with water and a thin, stiffer inner sleeve that copies the introvert. Around the trunk they embedded four regions of silicone containing tiny permanent magnets. When an external magnetic field is applied, these regions bend inward like artificial circular muscles, squeezing the trunk and pushing water into the inner sleeve. This causes the sleeve to evert and protrude, extending the robot to about two and a half times its original length. When the field is reduced, soft elastic strips pull the sleeve back, much like the worm’s retractor muscles. Because the robot is entirely soft and driven wirelessly by magnetism, it needs no internal electronics or rigid parts.
Why this matters for future soft machines
This work shows that an apparently simple, unsegmented worm can provide a rich design guide for soft robotics. By carefully measuring anatomy, tissue mechanics, and movement in realistic environments, the study explains how large shape changes and crawling can arise from a continuous body that redistributes internal fluid rather than relying on joints. The magnetically driven prototype proves that these principles can be translated into a practical device capable of large, controlled extension using only shape, materials, and an external field. Such approaches could inspire new soft tools that navigate tight spaces, pump fluids inside sealed systems, or adapt their shape in response to surroundings, all while remaining gentle and inherently safe.
Citation: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
Keywords: soft robotics, marine worms, hydrostatic skeleton, magnetic actuation, bioinspired design