Clear Sky Science · es
Anélidos marinos no segmentados como modelos biomecánicos para la robótica blanda
Lombrices que se estiran como máquinas vivientes
Imagine una criatura capaz de más que duplicar su longitud, colarse por espacios estrechos y cavar en el lecho marino, todo ello sin articulaciones. Este estudio examina esas lombrices marinas para descubrir trucos mecánicos sencillos que podrían ayudar a los ingenieros a construir robots más blandos y seguros para tareas como herramientas médicas, exploración submarina o manipulación industrial delicada.
Un cuerpo simple con una funda oculta e ingeniosa
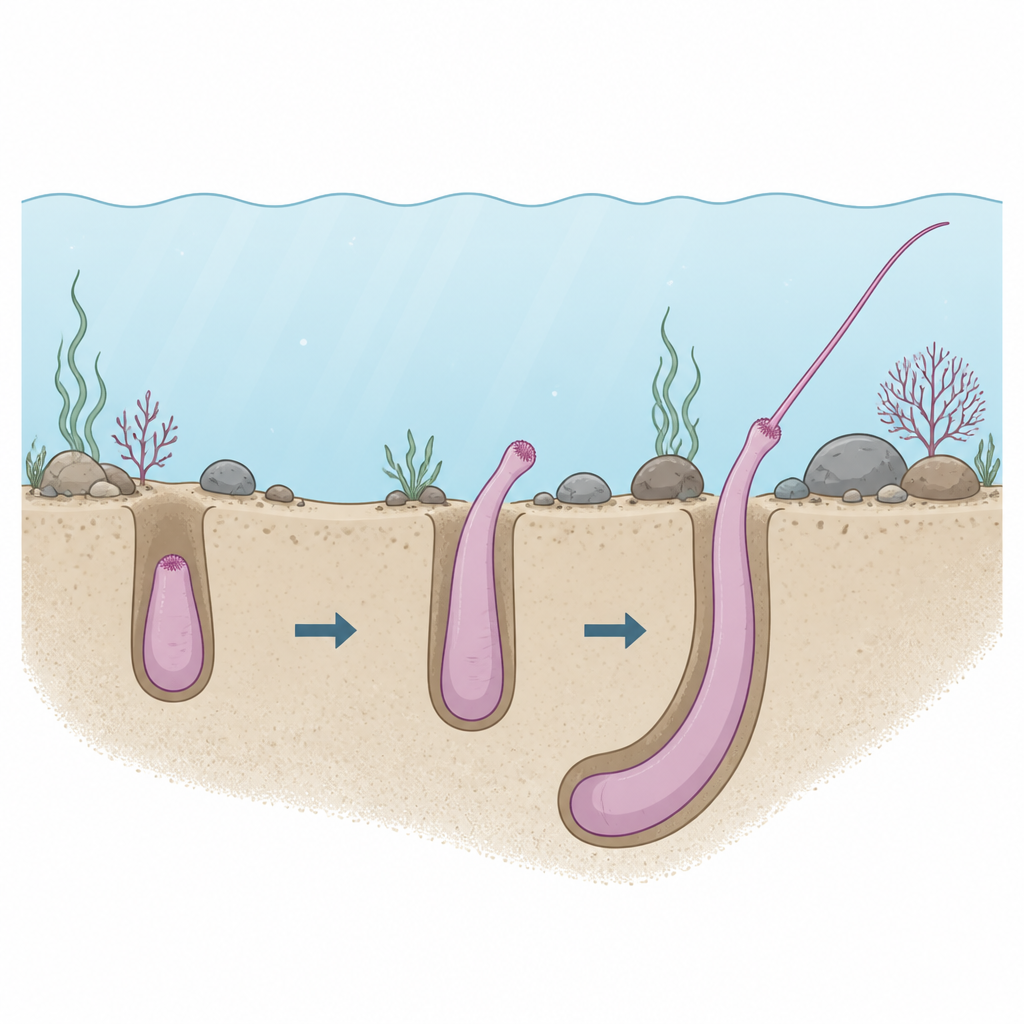
Los investigadores se centraron en una pequeña lombriz marina llamada Phascolosoma stephensoni. A primera vista parece un tubo sin rasgos, pero en su interior tiene una única cavidad llena de fluido que actúa como un esqueleto a base de agua. El cuerpo tiene dos partes principales: un tronco más grueso que aloja los órganos y una región frontal más delgada llamada introvert. El introvert se comporta como una funda metida hacia dentro que puede volverse del revés para formar una punta larga y exploradora. Con escáneres de rayos X de alta resolución, el equipo mapeó los músculos y la cavidad interna en distintas posturas, desde totalmente retraída hasta completamente extendida. Hallaron que el tronco apenas cambia de longitud durante el movimiento, mientras que la longitud total del cuerpo puede más que duplicarse porque el introvert se desenrolla y se estrecha al salir.
Cómo un tubo blando se impulsa hacia adelante
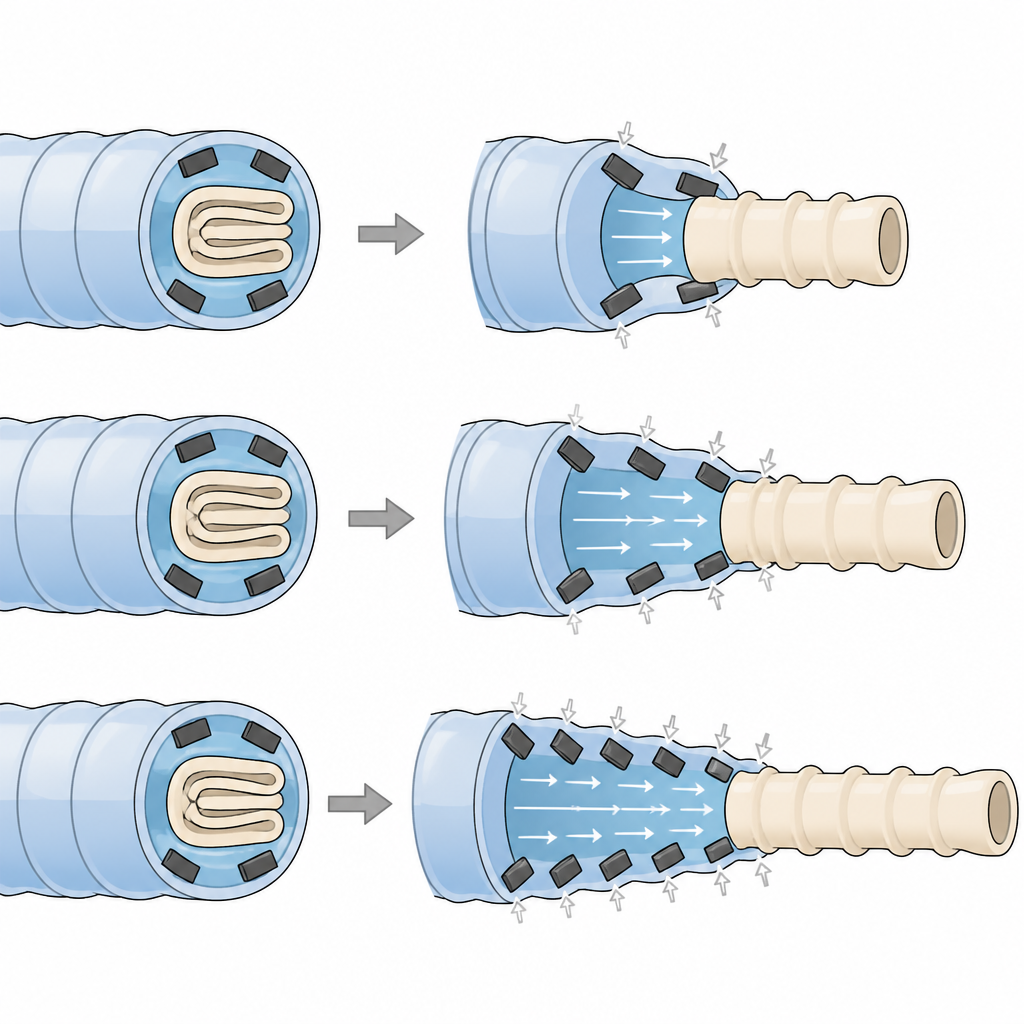
La clave de este truco es cómo la lombriz usa su fluido interno y las capas de músculo. Músculos circulares que rodean el tronco lo aprietan ligeramente, lo que eleva la presión interna del fluido. Dado que el volumen total se mantiene casi constante, ese fluido presurizado se desplaza hacia el introvert, forzándolo a evaginarsi y extenderse, algo parecido a la pasta de dientes saliendo de un tubo. Músculos retractores especiales que van desde la parte trasera del tronco hasta la punta del introvert lo retraen rápidamente, una defensa útil contra depredadores. Pruebas mecánicas en los tejidos mostraron que el tronco puede estirarse más que el introvert y soportar mayores tensiones, lo que lo hace adecuado como bomba de presión, mientras que el introvert, más rígido y con forma cónica, es mejor para una extensión controlada por desenrollamiento en lugar de por un gran estiramiento.
Observar el movimiento de las lombrices y convertirlo en matemáticas
Para entender cómo estos animales se arrastran y excavan, los científicos filmaron lombrices vivas moviéndose a través de canales estrechos rellenos de gel que imitan arena compactada o lodo. En estos espacios confinados el movimiento del cuerpo es casi bidimensional, lo que permitió mediciones precisas de los cambios de forma y de velocidad. Las lombrices se desplazaron mediante peristalsis, enviando ondas de estrechamiento y ensanchamiento a lo largo del cuerpo para avanzar a pulso, aunque carecen de los segmentos bien definidos de muchas otras lombrices. El equipo construyó un modelo matemático que trata a la lombriz como una varilla continua cuya longitud cambia localmente en el tiempo y en el espacio. Al combinar esto con mediciones de cómo el gel resiste la penetración, el modelo reprodujo el movimiento escalonado hacia adelante visto en los videos, con velocidades similares de aproximadamente medio a cinco milímetros por segundo.
De excavadora del lecho marino a robot blando
Con esta visión biológica, los investigadores construyeron un prototipo de robot blando que imita el truco hidráulico de la lombriz. El robot tiene un tronco exterior muy blando lleno de agua y una funda interior delgada y más rígida que copia el introvert. Alrededor del tronco incrustaron cuatro regiones de silicona que contienen pequeños imanes permanentes. Cuando se aplica un campo magnético externo, esas regiones se doblan hacia adentro como músculos circulares artificiales, comprimiendo el tronco y empujando agua hacia la funda interior. Esto hace que la funda se evagine y sobresalga, extendiendo el robot hasta unas dos veces y media su longitud original. Cuando se reduce el campo, tiras elásticas blandas retraen la funda, similar a los músculos retractores de la lombriz. Dado que el robot es completamente blando y se acciona inalámbricamente por magnetismo, no necesita electrónica interna ni piezas rígidas.
Por qué importa esto para las máquinas blandas del futuro
Este trabajo demuestra que una lombriz aparentemente simple y no segmentada puede ofrecer una guía de diseño rica para la robótica blanda. Midiendo con cuidado la anatomía, la mecánica de los tejidos y el movimiento en entornos realistas, el estudio explica cómo grandes cambios de forma y el desplazamiento pueden surgir de un cuerpo continuo que redistribuye fluido interno en lugar de depender de articulaciones. El prototipo accionado magnéticamente prueba que estos principios pueden traducirse en un dispositivo práctico capaz de una extensión grande y controlada usando solo forma, materiales y un campo externo. Tales enfoques podrían inspirar nuevas herramientas blandas que naveguen por espacios angostos, bombeen fluidos dentro de sistemas sellados o adapten su forma en respuesta al entorno, todo ello permaneciendo gentiles e intrínsecamente seguros.
Cita: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
Palabras clave: robótica blanda, lombrices marinas, esqueleto hidroestático, actuación magnética, diseño bioinspirado