Clear Sky Science · fr
Annélides marins non segmentés comme modèles biomécaniques pour la robotique molle
Des vers qui s’étirent comme des machines vivantes
Imaginez une créature capable de plus que doubler sa longueur, de se faufiler dans des espaces étroits et de creuser le fond marin, le tout sans aucune articulation. Cette étude examine de tels vers marins pour révéler des astuces mécaniques simples qui pourraient aider les ingénieurs à construire des robots plus souples et plus sûrs pour des tâches comme les instruments médicaux, l’exploration sous-marine ou la manipulation industrielle délicate.
Un corps simple avec une manchette cachée et astucieuse
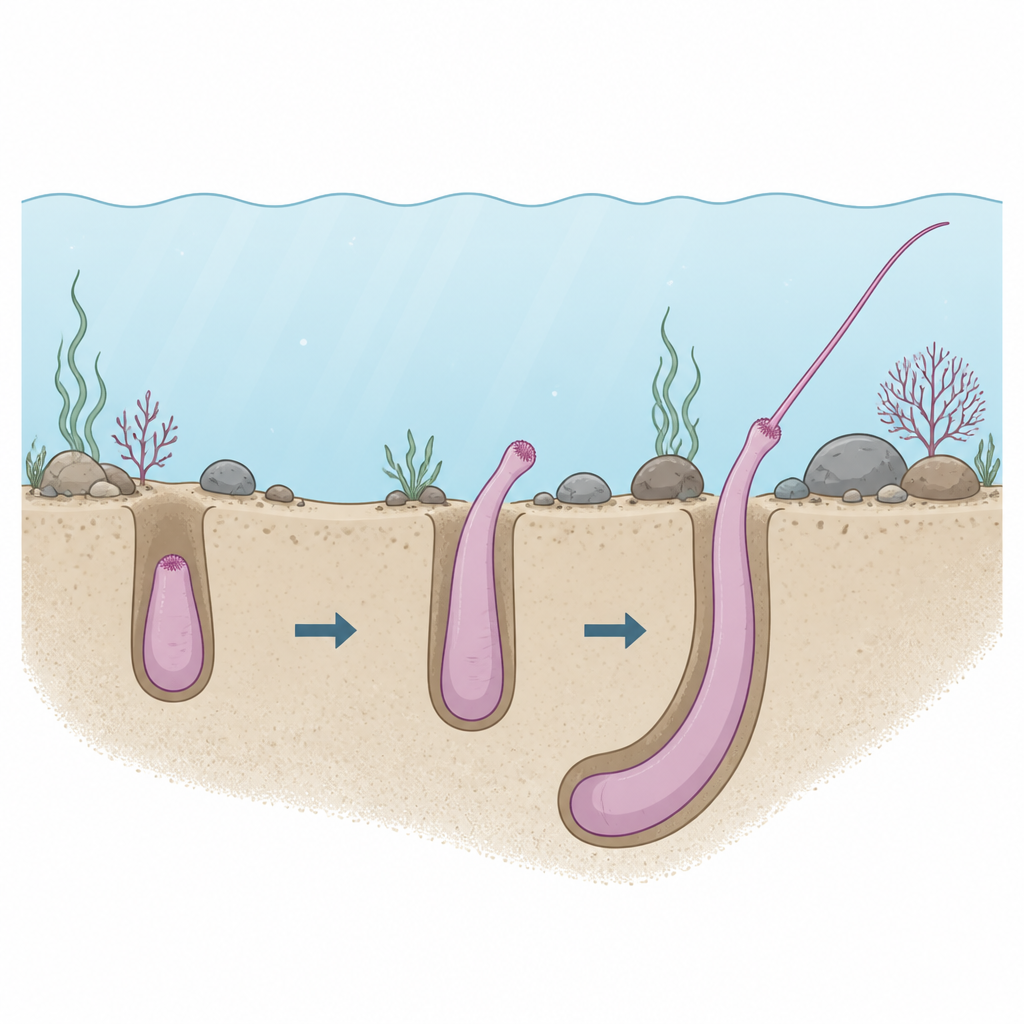
Les chercheurs se sont concentrés sur un petit ver marin appelé Phascolosoma stephensoni. À première vue, il ressemble à un tube sans particularité, mais à l’intérieur se trouve une seule cavité remplie de fluide qui joue le rôle d’un squelette hydraulique. Le corps comporte deux parties principales : un tronc plus épais contenant les organes, et une région frontale plus fine appelée introvert. L’introvert se comporte comme une manchette rentrées qui peut se retourner pour former une longue pointe sondeuse. Grâce à des scans X à haute résolution, l’équipe a cartographié les muscles et la cavité interne du ver dans différentes postures, de totalement rétractée à totalement étendue. Ils ont constaté que le tronc change très peu de longueur pendant le mouvement, tandis que la longueur totale du corps peut plus que doubler parce que l’introvert se déroule et s’affine en sortant.
Comment un tube mou se pousse vers l’avant
La clé de cette astuce réside dans l’utilisation du fluide interne et des couches musculaires du ver. Des muscles circulaires enroulés autour du tronc le compriment légèrement, ce qui augmente la pression interne du fluide. Comme le volume total reste presque constant, ce fluide pressurisé est poussé vers l’introvert, le forçant à s’éverser et à s’allonger, un peu comme du dentifrice sortant d’un tube. Des muscles rétracteurs spéciaux reliant l’arrière du tronc à la pointe de l’introvert le resserrent ensuite rapidement, une défense utile contre les prédateurs. Des essais mécaniques sur les tissus ont montré que le tronc peut s’étirer davantage que l’introvert et supporter des contraintes plus élevées, ce qui le rend bien adapté comme pompe de pression, tandis que l’introvert, plus rigide et conique, convient mieux à une extension contrôlée par déroulement plutôt que par un fort étirement.
Observer le mouvement des vers et traduire le geste en mathématiques
Pour comprendre comment ces animaux rampent et creusent, les scientifiques ont filmé des vers vivants se déplaçant dans des canaux étroits remplis de gel qui imitent du sable ou de la boue compactés. Dans ces espaces confinés, le mouvement du corps est presque bidimensionnel, ce qui permet des mesures précises des changements de forme et des vitesses. Les vers se déplacent par péristaltisme, envoyant des ondes de rétrécissement et d’élargissement le long de leur corps pour avancer, même s’ils n’ont pas les segments distincts de nombreux autres vers. L’équipe a construit un modèle mathématique traitant le ver comme une tige continue dont la longueur varie localement dans le temps et l’espace. En combinant cela avec des mesures de la résistance du gel à la pénétration, le modèle a reproduit le mouvement par étapes observé dans les vidéos, avec des vitesses similaires d’environ 0,5 à 5 millimètres par seconde.
Du fouisseur du fond marin au robot mou
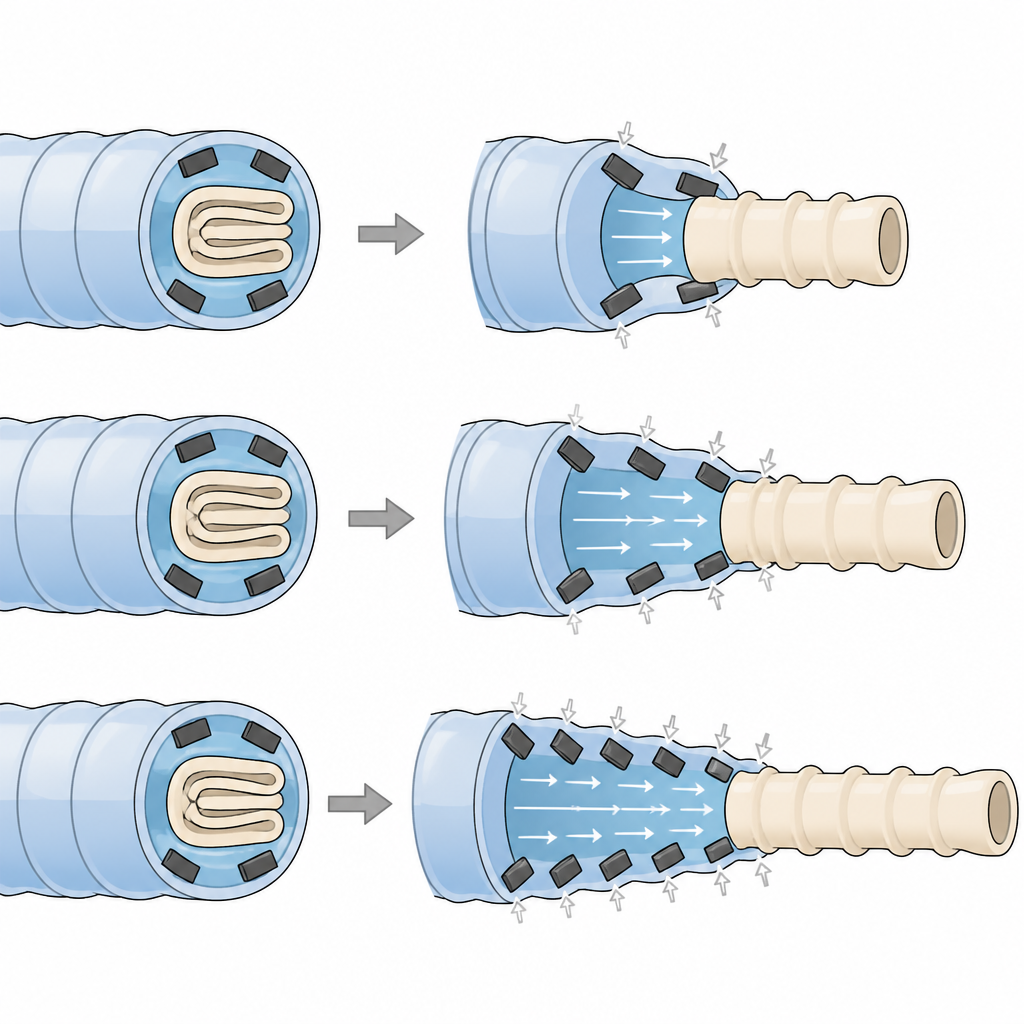
Forts de ces connaissances biologiques, les chercheurs ont construit un prototype de robot mou qui imite l’astuce hydraulique du ver. Le robot possède un tronc très souple rempli d’eau et une manchette intérieure plus fine et plus rigide qui reproduit l’introvert. Autour du tronc, ils ont intégré quatre zones de silicone contenant de petits aimants permanents. Lorsqu’un champ magnétique externe est appliqué, ces zones se courbent vers l’intérieur comme des muscles circulaires artificiels, comprimant le tronc et poussant l’eau dans la manchette intérieure. Cela provoque l’éversion et la protrusion de la manchette, étendant le robot à environ deux fois et demie sa longueur initiale. Lorsque le champ diminue, des bandes élastiques souples replient la manchette, à la manière des muscles rétracteurs du ver. Parce que le robot est entièrement mou et actionné sans fil par magnétisme, il n’a ni électronique interne ni pièces rigides.
Pourquoi cela compte pour les machines molles de demain
Ce travail montre qu’un ver apparemment simple et non segmenté peut fournir un guide de conception riche pour la robotique molle. En mesurant précisément l’anatomie, la mécanique des tissus et le mouvement dans des environnements réalistes, l’étude explique comment de grands changements de forme et la capacité à ramper peuvent émerger d’un corps continu qui redistribue un fluide interne plutôt que de s’appuyer sur des articulations. Le prototype actionné magnétiquement prouve que ces principes peuvent être traduits en un dispositif pratique capable d’une extension importante et contrôlée en n’utilisant que la forme, les matériaux et un champ externe. De telles approches pourraient inspirer de nouveaux outils mous capables de se faufiler dans des espaces étroits, de pomper des fluides à l’intérieur de systèmes scellés ou d’adapter leur forme en fonction de leur environnement, tout en restant doux et intrinsèquement sûrs.
Citation: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
Mots-clés: robotique molle, vers marins, squelette hydrostatique, actionnement magnétique, conception bio-inspirée