Clear Sky Science · ar
الدوّاسات البحرية غير المقسّمة كنماذج بيوميكانيكية للروبوتات اللينة
ديدان تتمدّد كالآلات الحية
تخيل كائنًا يمكنه أن يزيد طوله بأكثر من الضعف، يندفع عبر فتحات ضيّقة، ويحفر في قاع البحر، كل ذلك بلا مفاصل. تبحث هذه الدراسة في مثل هذه الديدان البحرية لتكشف خدعًا ميكانيكية بسيطة قد تساعد المُهندسين على بناء روبوتات أكثر ليونةً وأمانًا لمهام مثل الأدوات الطبية، الاستكشاف تحت الماء، أو المناولة الصناعية الحساسة.
جسم بسيط مع غلاف مخفي ذكي
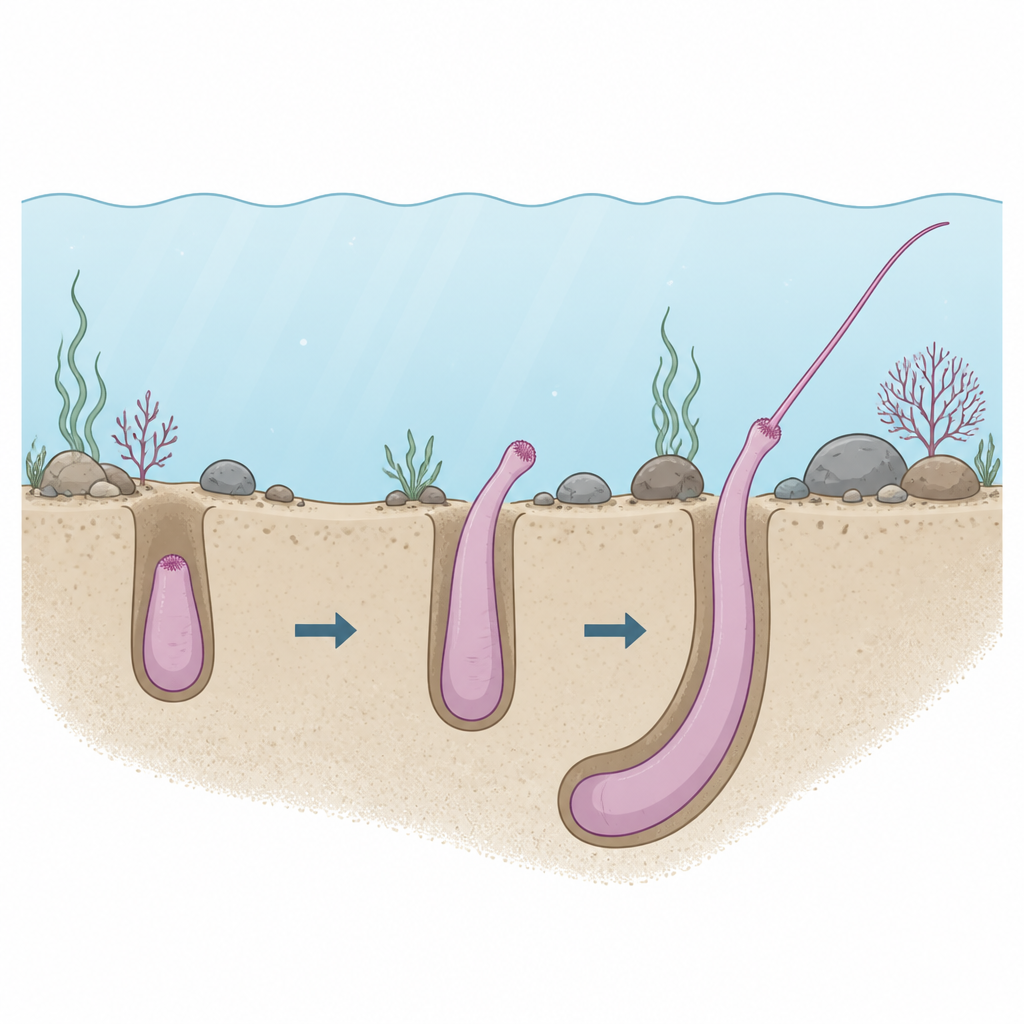
ركّز الباحثون على دودة بحرية صغيرة تُسمى Phascolosoma stephensoni. تبدو للوهلة الأولى كأنبوب عديم الملامح، لكن في الداخل توجد تجويف واحد مملوء بالسائل يعمل كهيكل مائي. للجسم قسمان رئيسيان: جذع أكثر سمكًا يضمُّ الأعضاء، ومنطقة أمامية أنحف تُسمى الانترفرت. يتصرّف الانترفرت كغلاف مطوي يمكن قلبه إلى الخارج ليكوّن طرفًا طويلاً للاستكشاف. باستخدام فحوصات بالأشعة السينية عالية الدقة، رسم الفريق خرائط لعضلات الدودة والتجويف الداخلي في أوضاع مختلفة، من مُنسحب تمامًا إلى ممتد بالكامل. وجدوا أن طول الجذع يتغير قليلاً أثناء الحركة، بينما يمكن أن يتضاعف الطول الكلي لأن الانترفرت ينفكّ ويلتف ويضيق عند خروجه.
كيف يدفع أنبوب لين نفسه للأمام
تكمن الحيلة في كيفية استخدام الدودة لسائلها الداخلي وطبقات عضلاتها. تضغط العضلات الدائرية الملفوفة حول الجذع على تناقص قطره قليلًا، ما يرفع الضغط الداخلي في السائل. وبما أن الحجم الكلي يبقى شبه ثابت، فإن هذا السائل المضغوط يُدفع إلى الأمام نحو الانترفرت، مما يجبره على الانقلاب إلى الخارج والامتداد، مثل خروج معجون الأسنان من الأنبوب. ثم تسحب عضلات مُسحِبة خاصة تمتد من ظهر الجذع إلى طرف الانترفرت الجزء بسرعة إلى الداخل، وهو دفاع مفيد ضد المفترسات. أظهرت اختبارات ميكانيكية على الأنسجة أن الجذع يمكن أن يمتد أكثر من الانترفرت ويتحمّل إجهادات أعلى، مما يجعله مناسبًا كمضخة ضغط، بينما الانترفرت المخروطي الأشد صلابة أفضل للامتداد المُتحكَّم به عبر التفكيك بدلًا من التمدد الشديد.
مراقبة حركة الديدان وتحويل الحركة إلى رياضيات
لفهم كيفية زحف هذه الحيوانات وحفرها، صوّر العلماء ديدانًا حية تتحرك عبر قنوات ضيّقة مملوءة بهلام يُحاكي رمالًا أو طينًا مضغوطًا. في هذه الفراغات المحصورة تكون حركة الجسم ثنائية الأبعاد تقريبًا، مما يسمح بقياسات دقيقة لتغيرات الشكل والسرعات. تحرّكت الديدان باستخدام التقلّص الموجي (الحركة الطردية)، مرسلة موجات تضييق واتساع على طول أجسامها للتحرك إلى الأمام، على الرغم من افتقارها للتقسيمات الواضحة التي تمتلكها ديدان أخرى. بنى الفريق نموذجًا رياضيًا يعامل الدودة كقضيب مستمر يتغير طوله محليًا مع الزمن والمكان. بدمجه مع قياسات مقاومة الهلام للاختراق، نجح النموذج في إعادة إنتاج الحركة الخطوية المتقدمة كما في الفيديوهات، بسرعات مشابهة تتراوح تقريبًا بين نصف إلى خمسة مليمترات في الثانية.
من حفار قاع البحر إلى روبوت لين
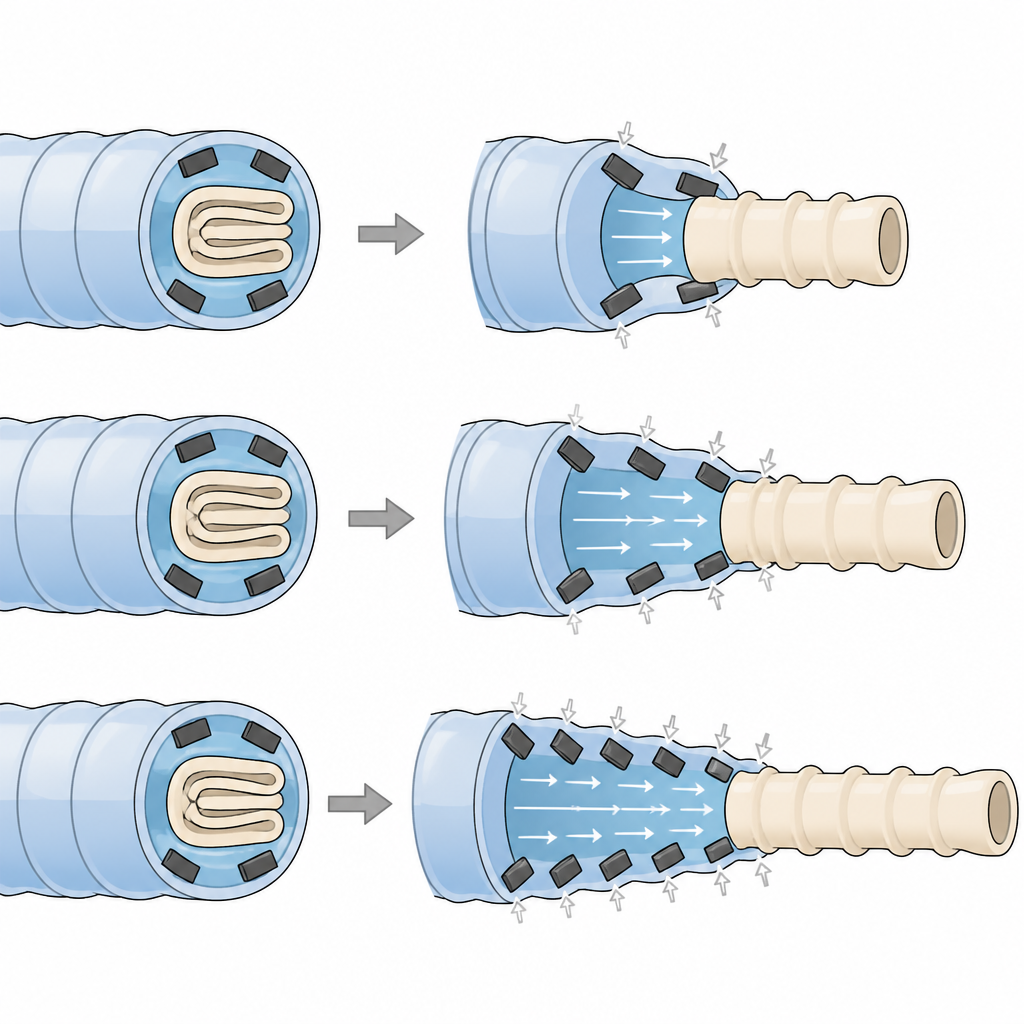
مزوّدين بهذه الرؤى البيولوجية، صنع الباحثون نموذجًا أوليًا لروبوت لين يُحاكي خدعة الدودة الهيدروليكية. يحتوي الروبوت على جذع خارجي لين جدًا مملوء بالماء وغلاف داخلي أنحف وأكثر صلابة يشبه الانترفرت. حول الجذع زرعوا أربع مناطق من السيليكون تحتوي على مغناطيسات دائمة صغيرة. عند تطبيق مجال مغناطيسي خارجي تنحني هذه المناطق إلى الداخل كعضلات دائرية صناعية، ضاغطةً على الجذع ودفعةً للماء نحو الغلاف الداخلي. يؤدي ذلك إلى انقلاب الغلاف وبرزّه، ممدّدًا الروبوت لما يقارب مرتين ونصف طوله الأصلي. عند تقليل المجال تسحب شرائط مرنة ناعمة الغلاف إلى الداخل، تمامًا كعضلات السحب في الدودة. وبما أن الروبوت لين بالكامل ويُشغَّل لاسلكيًا بواسطة المغناطيسية، فلا يحتاج إلى إلكترونيات داخلية أو أجزاء صلبة.
لماذا هذا مهم للآلات اللينة المستقبلية
تُظهر هذه الدراسة أن دودة غير مقسّمة تبدو بسيطة يمكن أن توفّر دليل تصميم غني للروبوتات اللينة. من خلال قياس التشريح، وميكانيكا الأنسجة، والحركة في بيئات واقعية بدقة، تشرح الدراسة كيف تنشأ تغييرات شكلية كبيرة والزحف من جسم مستمر يعيد توزيع السائل الداخلي بدلًا من الاعتماد على المفاصل. يبرهن النموذج الأولي المحرَّك مغناطيسيًا أن هذه المبادئ قابلة للترجمة إلى جهاز عملي قادر على امتدادات كبيرة ومتحكّم بها باستخدام الشكل والمواد ومجال خارجي فقط. قد تُلهم مثل هذه المقاربات أدوات لينة جديدة تتنقل في فراغات ضيقة، تضخ سوائل داخل أنظمة مختومة، أو تتكيّف شكلًا مع المحيط، كل ذلك مع حفاظها على نعومة وأمان فطري.
الاستشهاد: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
الكلمات المفتاحية: الروبوتات اللينة, ديدان بحرية, هيكل هيدروستاتي, التحريك المغناطيسي, تصميم مستوحى من الطبيعة