Clear Sky Science · ja
継ぎ目のない海洋環形動物を軟体ロボティクスの生体力学モデルとして
生きた機械のように伸びるワーム
体長を二倍以上に伸ばし、狭い隙間をすり抜け、海底に潜ることができる生き物を想像してみてください。しかも関節はありません。本研究はこのような海洋ワームを調べ、医療用機器、海中探査、あるいは繊細な産業作業のために、より柔らかく安全なロボットを設計する上で役立つ単純な力学トリックを明らかにしようとしています。
巧妙な隠れスリーブを持つ単純な体
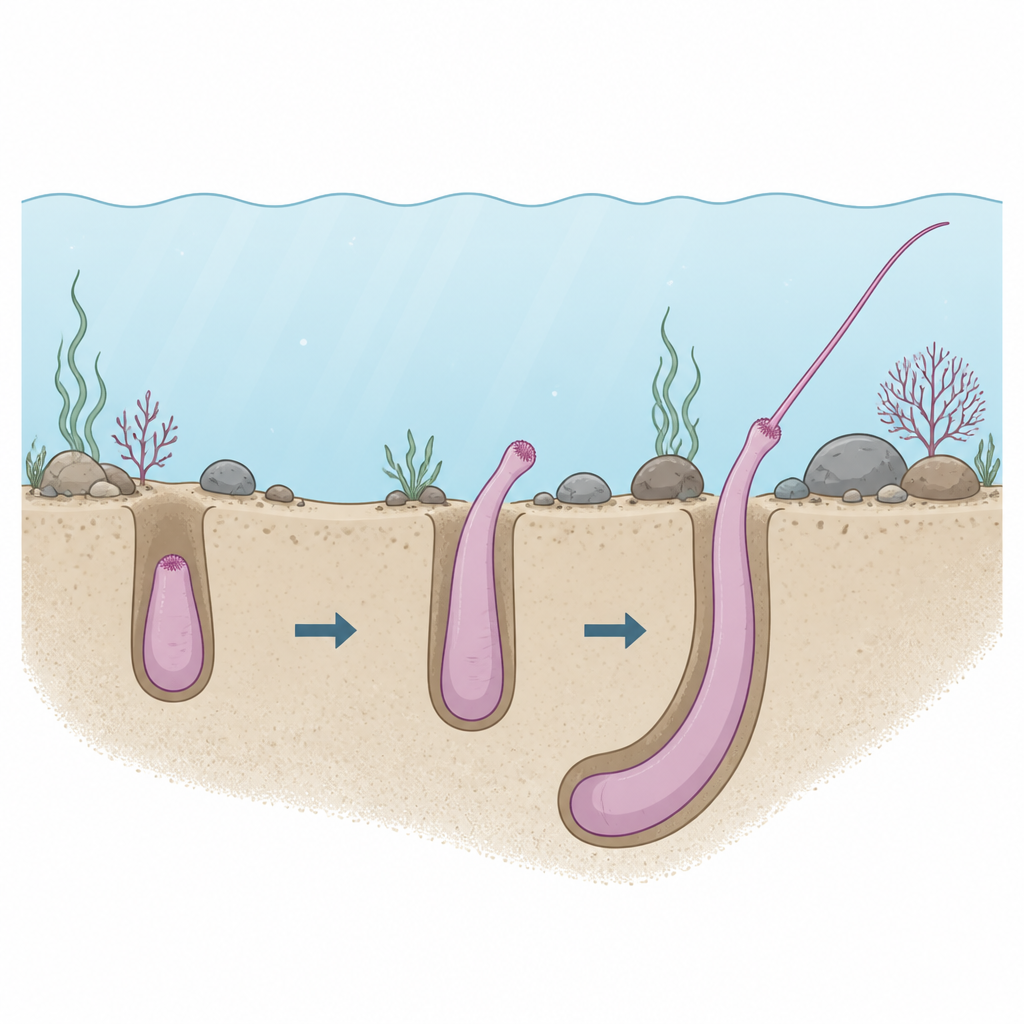
研究者らはPhascolosoma stephensoniという小さな海洋ワームに注目しました。一見すると特徴のない円筒に見えますが、内部には水で満たされた単一の空洞があり、水性の骨格として機能しています。体は大きく二つの部分に分かれます:臓器を収める太い胴部と、イントロバートと呼ばれる細い前方領域です。イントロバートは折りたたまれたスリーブのように振る舞い、内側から外側へ反転して長い探針状の先端を形成できます。高解像度のX線スキャンで、研究チームは完全に引っ込んだ状態から完全に伸びた状態までの筋肉と内腔の配置をマッピングしました。胴部は運動中ほとんど長さを変えない一方で、イントロバートが展開して細くなることで全体の体長は二倍以上に増すことがわかりました。
軟らかい管が自分を前進させる仕組み
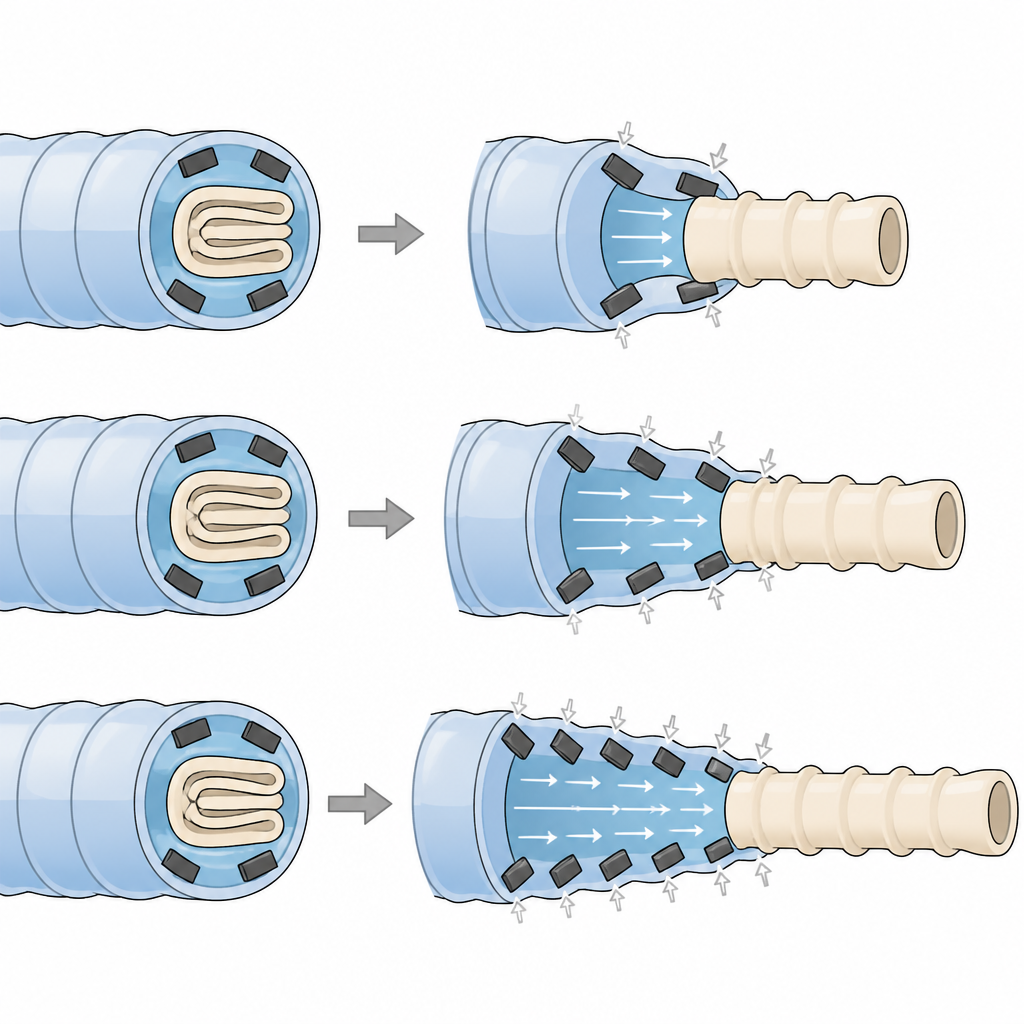
この秘訣は、ワームが内部の液体と筋層をどのように使うかにあります。胴部を取り巻く円周筋が胴部をわずかに細く絞ると、内部流体の圧力が上がります。総体積がほぼ一定であるため、加圧された流体は前方のイントロバートへ押し出され、それが反転して伸びる—まるでチューブから歯磨き粉が押し出されるのに似ています。胴部後方からイントロバート先端へ走る特殊な収縮筋がそれを素早く引き戻し、捕食者からの防御に有用です。組織に対する機械試験では、胴部がイントロバートよりも大きく伸び、より高い応力に耐えられることが示され、胴部は圧力ポンプとして適している一方で、先端の円錐状でより剛性のあるイントロバートは大きな伸張でなく反転によって制御された伸長を行うのに適していることが示されました。
ワームの動きを観察し動きを数式化する
これらの動物がどのように這い、掘るかを理解するため、科学者たちは生きたワームが充填ゲルの狭い通路を通って移動する様子を撮影しました。これらの通路は詰まった砂や泥を模しています。こうした閉鎖空間では体の動きはほぼ二次元的になり、形状変化や速度を精密に測定できます。ワームは節がはっきりした多くの他のワームとは異なり、体に沿って狭窄と拡張の波を送ることで前進する蠕動運動を用いて進みました。研究チームは、ワームを局所的に時間と空間で長さが変わる連続のロッドとして扱う数学モデルを構築しました。これをゲルの侵入抵抗の測定と組み合わせることで、映像で見られた段階的な前進運動を再現し、おおむね0.5〜5ミリメートル毎秒の同等の速度を示しました。
海底潜り生物から軟体ロボットへ
この生物学的洞察を元に、研究者たちはワームの水圧トリックを模したソフトロボット試作機を製作しました。ロボットは水で満たされた非常に柔らかい外胴部と、イントロバートを模した薄くやや剛性のある内側スリーブを備えています。胴部の周りには、小さな永久磁石を含むシリコーン領域を四箇所埋め込みました。外部から磁場を印加すると、これらの領域は人工的な円周筋のように内側へ曲がり、胴部を絞って水を内側スリーブへ押し込みます。これによりスリーブは反転して突出し、ロボットは元の長さの約2.5倍まで伸びます。磁場を弱めると、柔らかい弾性ストリップがスリーブを元に引き戻し、ワームの収縮筋に似た動作をします。ロボットは完全に柔らかく、磁気で無線駆動されるため、内部電子機器や剛性部品を必要としません。
将来のソフトマシンにとっての意義
本研究は、一見単純な非分節のワームがソフトロボティクスに豊富な設計指針を提供しうることを示しています。解剖学、組織の力学、現実的な環境下での運動を慎重に計測することで、関節に依存することなく内部流体を再分配する連続体から大きな形状変化と這う運動が生み出される仕組みを説明しました。磁気駆動の試作機は、形状、材料、外部磁場だけで大きく制御された伸長を実現できることを実証しています。このようなアプローチは、狭い空間を移動する新しい柔らかい道具、密閉系内で流体を移送するポンプ、あるいは周囲に応じて形状を適応させる装置など、優しく本質的に安全なソリューションの開発に着想を与える可能性があります。
引用: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
キーワード: ソフトロボティクス, 海洋ワーム, 流体骨格, 磁気作動, 生体模倣設計