Clear Sky Science · ru
Неблокированные морские кольчатые как биомеханические модели для мягкой робототехники
Черви, которые растягиваются как живые машины
Представьте существо, которое может более чем вдвое увеличивать длину, протискиваться через узкие щели и вкапываться в морское дно — и все это без единого сустава. В этом исследовании изучают такие морские черви, чтобы раскрыть простые механические приемы, которые могут помочь инженерам создавать более мягких и безопасных роботов для задач вроде медицинских инструментов, подводных разведок или аккуратной промышленной обработки.
Простое тело с хитрым скрытым «рукавом»
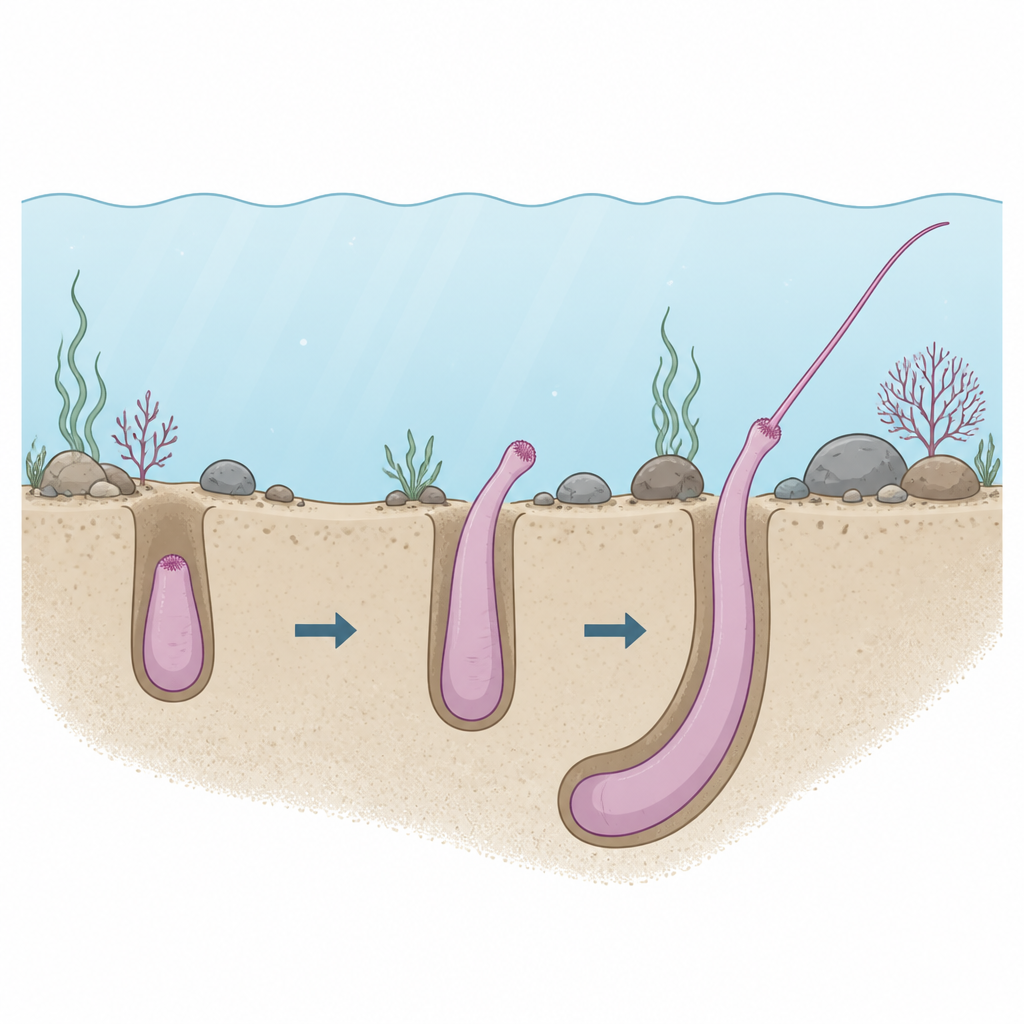
Исследователи сосредоточились на небольшом морском черве Phascolosoma stephensoni. На первый взгляд он похож на бесформенную трубку, но внутри у него одна полость, заполненная жидкостью, которая служит водяным скелетом. Тело состоит из двух основных частей: более толстого ствола, в котором расположены органы, и более тонкой передней области, называемой интровертом. Интроверт ведет себя как заправленный внутрь рукав, который можно выворачивать, формируя длинный зондирующий наконечник. С помощью высокоразрешающих рентгеновских сканов команда картировала мышцы и внутреннюю полость червя в разных позах — от полностью втянутой до полностью выдвинутой. Они обнаружили, что длина ствола почти не меняется при движении, тогда как общая длина тела может более чем удваиваться за счет того, что интроверт выворачивается и сужается при выдвижении.
Как мягкая трубка проталкивает себя вперед
Ключ к этому трюку — использование внутренней жидкости и слоев мышц. Круговые мышцы, обернутые вокруг ствола, слегка сжимают его, что повышает внутреннее давление жидкости. Поскольку общий объем остается почти постоянным, эта под давлением жидкость перемещается вперед в интроверт, выталкивая его наружу и вывертывая, подобно пасте, выдавливаемой из тюбика. Особые тянущие мышцы, идущие от задней части ствола к кончику интроверта, затем быстро втягивают его обратно — полезный прием защиты от хищников. Механические испытания тканей показали, что ствол может растягиваться больше, чем интроверт, и выдерживать большие напряжения, что делает его хорошим насосом давления, в то время как более жесткий, конусообразный интроверт лучше подходит для управляемого выдвижения посредством разворачивания, а не сильного растяжения.
Наблюдение за движением червей и перевод движения в математику
Чтобы понять, как эти животные ползают и роют, ученые снимали живых червей в узких каналах, заполненных гелем, имитирующем уплотненный песок или ил. В этих ограниченных пространствах движение тела почти двумерно, что позволяет точно измерять изменения формы и скорости. Черви двигались с помощью перистальтики, посылая волны сужения и расширения вдоль тела, чтобы передвигаться, несмотря на отсутствие отчетливых сегментов, как у многих других червей. Команда создала математическую модель, рассматривающую червя как непрерывный стержень, длина которого локально изменяется во времени и пространстве. В сочетании с измерениями сопротивления геля проникновению модель воспроизвела ступенчатое движение вперед, наблюдаемое на видео, с похожими скоростями примерно от 0,5 до 5 миллиметров в секунду.
От роющего морского жителя к мягкому роботу
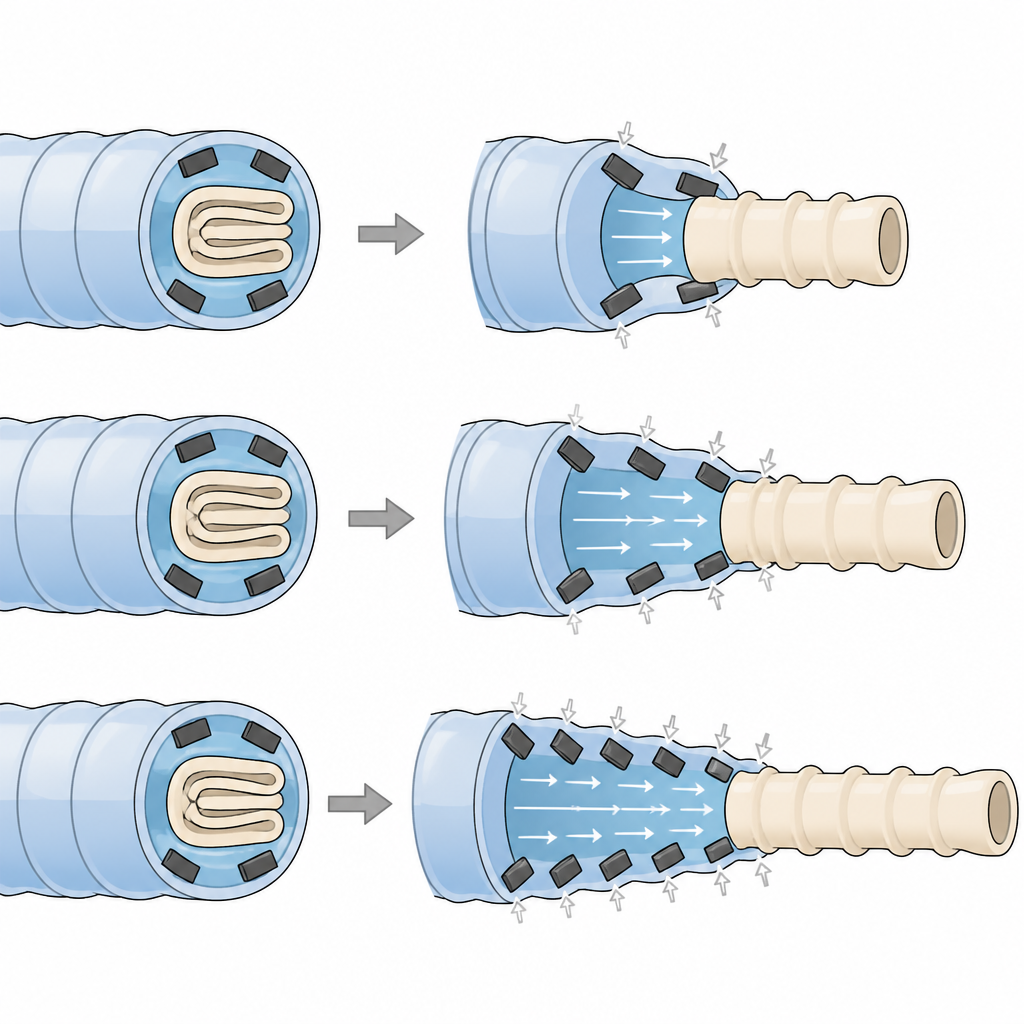
Вооруженные биологическими наблюдениями, исследователи создали прототип мягкого робота, имитирующий гидравлический трюк червя. Робот имеет очень мягкий внешний ствол, заполненный водой, и тонкий, более жесткий внутренний «рукав», копирующий интроверт. Вокруг ствола встроены четыре области силикона с крошечными постоянными магнитами. При приложении внешнего магнитного поля эти области изгибаются внутрь, напоминая искусственные круговые мышцы, сжимая ствол и выталкивая воду в внутренний рукав. Это приводит к выворачиванию и выдвижению рукава, удлиняя робот примерно в два с половиной раза от исходной длины. Когда поле ослабляют, мягкие эластичные полосы подтягивают рукав обратно, подобно тянущим мышцам червя. Поскольку робот полностью мягкий и управляется беспроводно магнитным полем, ему не нужны внутренние электронные или жесткие элементы.
Почему это важно для будущих мягких машин
Эта работа показывает, что на первый взгляд простой, неблокированный червь может служить богатым источником идей для мягкой робототехники. Тщательно измеряя анатомию, механику тканей и движение в реалистичных условиях, исследование объясняет, как большие изменения формы и ползание могут возникать из непрерывного тела, которое перераспределяет внутреннюю жидкость вместо использования суставов. Магнитно управляемый прототип доказывает, что эти принципы можно перенести в практическое устройство, способное к большим управляемым выдвижениям, используя только форму, материалы и внешнее поле. Такие подходы могут вдохновить новые мягкие инструменты, способные проходить через узкие пространства, перекачивать жидкости внутри герметичных систем или адаптировать форму в ответ на окружение, оставаясь при этом деликатными и по своей сути безопасными.
Цитирование: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
Ключевые слова: мягкая робототехника, морские черви, гидростатический скелет, магнитное приведение, бионический дизайн