Clear Sky Science · sv
Osegmenterade marina ringmaskar som biomekaniska modeller för mjukrobotik
Maskar som sträcker sig som levande maskiner
Tänk dig en varelse som kan mer än dubblera sin längd, pressa sig igenom trånga utrymmen och gräva i havsbotten — allt utan några leder. Denna studie undersöker sådana marina maskar för att avslöja enkla mekaniska knep som kan hjälpa ingenjörer att bygga mjukare, säkrare robotar för uppgifter som medicinska verktyg, undervattensutforskning eller skonsam industriell hantering.
En enkel kropp med en smart dold ärm
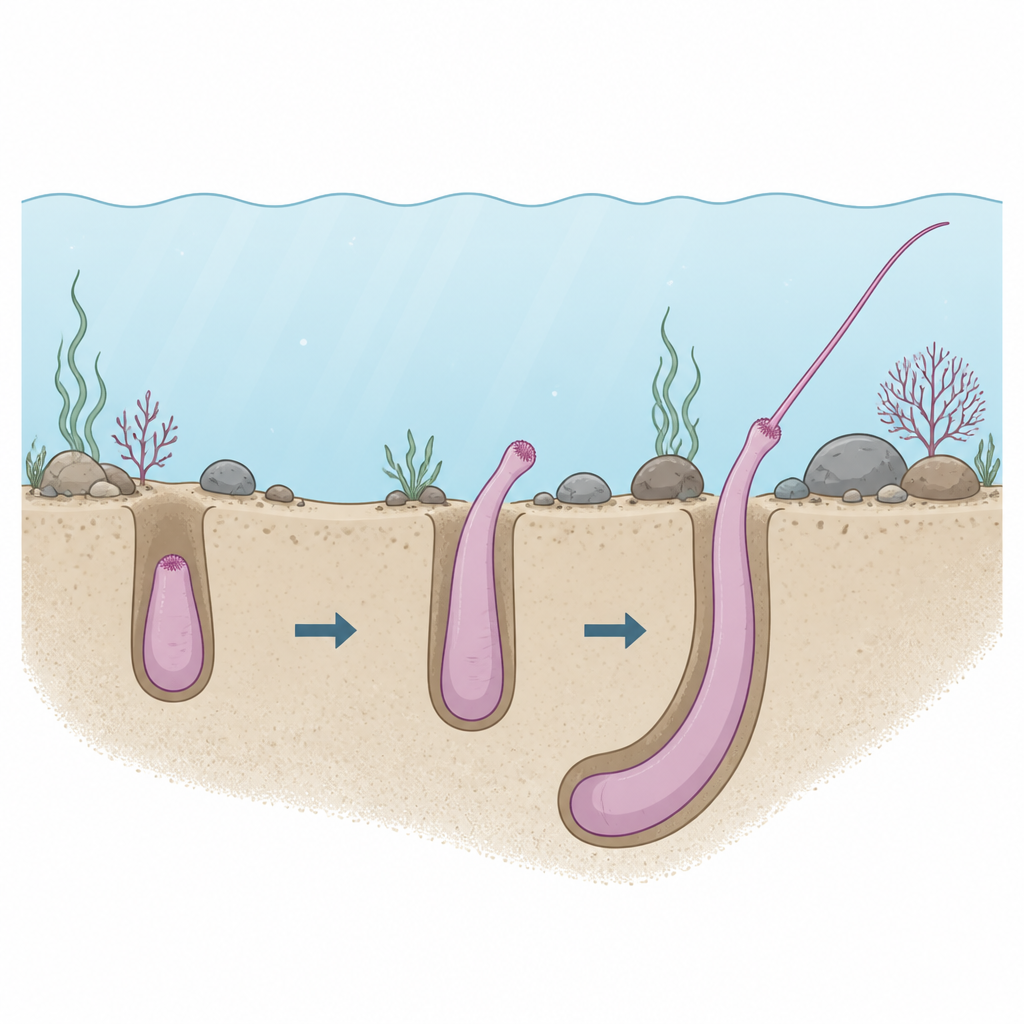
Forskarna fokuserade på en liten marin mask kallad Phascolosoma stephensoni. Vid en första anblick ser den ut som ett oansenligt rör, men inuti finns en enda vätskefylld hålighet som fungerar som ett vattenskelett. Kroppen har två huvuddelar: en tjockare bål som rymmer organen och en tunnare främre del som kallas introverten. Introverten beter sig som en instoppad ärm som kan vändas ut för att bilda en lång, undersökande spets. Med högupplösta röntgenskanningar kartlade teamet maskens muskler och inre hålighet i olika poser, från helt indragen till helt utdragen. De fann att bålen nästan inte ändrar längd under rörelse, medan kroppens totala längd kan mer än fördubblas eftersom introverten rullas ut och smalnar av när den kommer ut.
Hur ett mjukt rör skjuter sig framåt
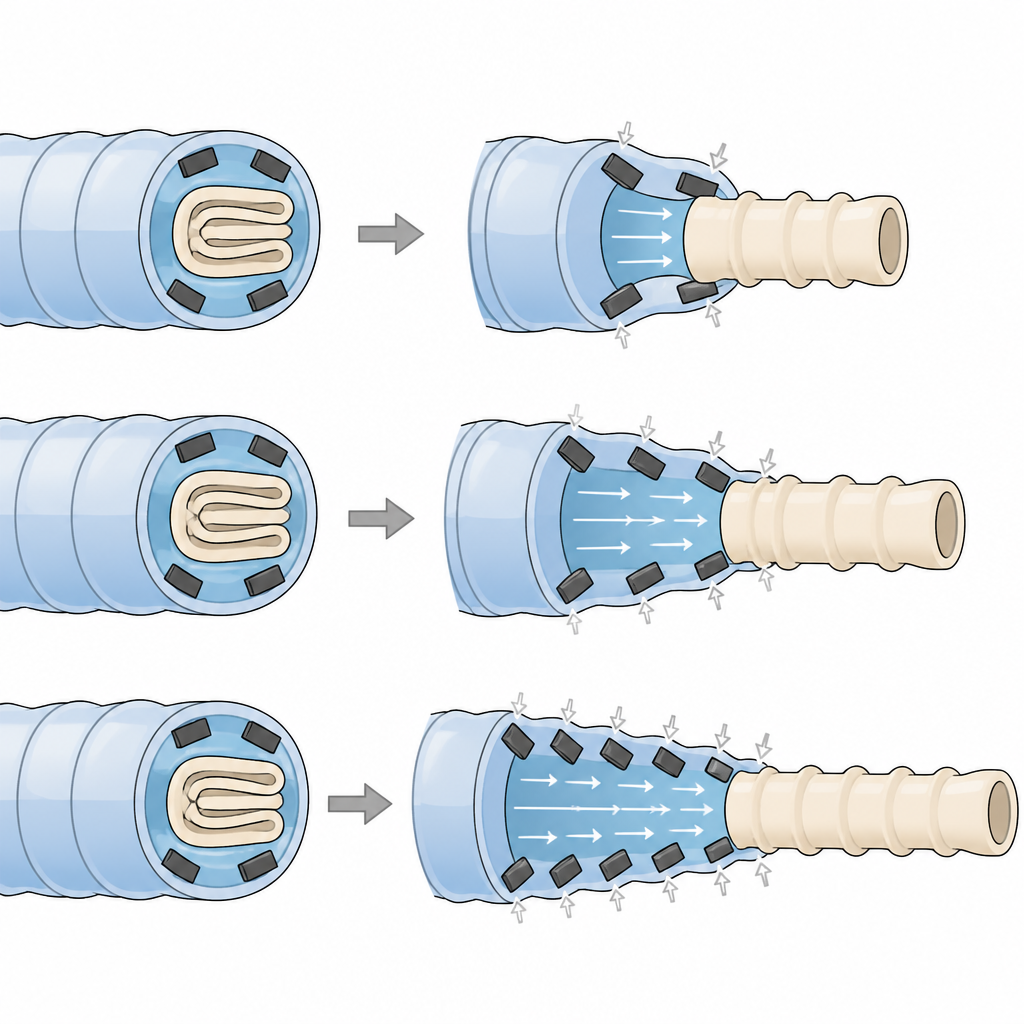
Nyckeln till detta trick är hur masken använder sin inre vätska och muskellager. Cirkulära muskler runt bålen pressar den något smalare, vilket ökar det inre trycket i vätskan. Eftersom den totala volymen förblir nästan konstant pressas den förhöjda vätskan framåt in i introverten och tvingar den att evetera och förlängas, ungefär som tandkräm som pressas ut ur ett rör. Särskilda retraktormuskler som löper från baktill i bålen till spetsen av introverten drar sedan snabbt in den igen — ett användbart försvar mot rovdjur. Mekaniska tester på vävnaderna visade att bålen kan töjas mer än introverten och tåla högre påfrestningar, vilket gör den väl anpassad som en tryckpump, medan den styvare, konformade introverten är bättre för kontrollerad utdragning genom att rullas ut snarare än genom kraftig töjning.
Att studera maskarnas rörelser och omvandla dem till matematik
För att förstå hur dessa djur kryper och gräver filmade forskarna levande maskar som rörde sig genom smala, gelifyllda kanaler som efterliknar packad sand eller lera. I dessa begränsade utrymmen är kroppens rörelse nästan tvådimensionell, vilket möjliggör precisa mätningar av formförändringar och hastigheter. Maskarna rörde sig med peristaltik och skickade vågor av förträngning och vidgning längs sina kroppar för att krypa framåt, trots att de saknar de tydliga segment som många andra maskar har. Teamet byggde en matematisk modell som behandlar masken som en kontinuerlig stång vars längd förändras lokalt i tid och rum. Genom att kombinera detta med mått på hur gelen motstår inträngning återgav modellen det stegvisa framåtskridande som sågs i videorna, med liknande hastigheter på ungefär en halv till fem millimeter per sekund.
Från bottenlevande grävare till mjuk robot
Beväpnade med denna biologiska insikt byggde forskarna en mjuk robotprototyp som imiterar maskens hydrauliska knep. Roboten har en mycket mjuk yttre bål fylld med vatten och en tunn, styvare inre ärm som efterliknar introverten. Runt bålen inbäddade de fyra silikonområden innehållande små permanenta magneter. När ett yttre magnetfält appliceras böjer dessa områden sig inåt som artificiella cirkulära muskler, pressar bålen och skjuter vatten in i den inre ärmen. Detta får ärmen att evetera och skjuta ut, vilket förlänger roboten till ungefär två och en halv gånger dess ursprungliga längd. När fältet minskas drar mjuka elastiska remsor tillbaka ärmen, likt maskens retraktormuskler. Eftersom roboten är helt mjuk och drivs trådlöst med magnetism behövs inga interna elektroniska komponenter eller styva delar.
Varför det här är viktigt för framtidens mjuka maskiner
Detta arbete visar att en till synes enkel, osegmenterad mask kan ge en rik designvägledning för mjukrobotik. Genom noggranna mätningar av anatomi, vävnadsmekanik och rörelse i realistiska miljöer förklarar studien hur stora formförändringar och krypning kan uppstå från en kontinuerlig kropp som omfördelar intern vätska i stället för att förlita sig på leder. Den magnetiskt drivna prototypen bevisar att dessa principer kan översättas till en praktisk enhet som möjliggör stora, kontrollerade förlängningar med endast form, material och ett yttre fält. Sådana tillvägagångssätt kan inspirera nya mjuka verktyg som navigerar i trånga utrymmen, pumpar vätskor i slutna system eller anpassar sin form i respons till omgivningen — allt samtidigt som de förblir skonsamma och inneboende säkra.
Citering: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
Nyckelord: mjukrobotik, marina maskar, hydrostatisk skelett, magnetisk aktivering, bioinspirerad design