Clear Sky Science · pt
Anelídeos marinhos não segmentados como modelos biomecânicos para robótica macia
Minhocas que se esticam como máquinas vivas
Imagine uma criatura capaz de mais que dobrar seu comprimento, espremer-se por fendas estreitas e cavar o fundo do mar, tudo isso sem qualquer articulação. Este estudo examina tais minhocas marinhas para descobrir truques mecânicos simples que podem ajudar engenheiros a construir robôs mais macios e seguros para tarefas como ferramentas médicas, exploração subaquática ou manuseio industrial delicado.
Um corpo simples com uma manga engenhosa escondida
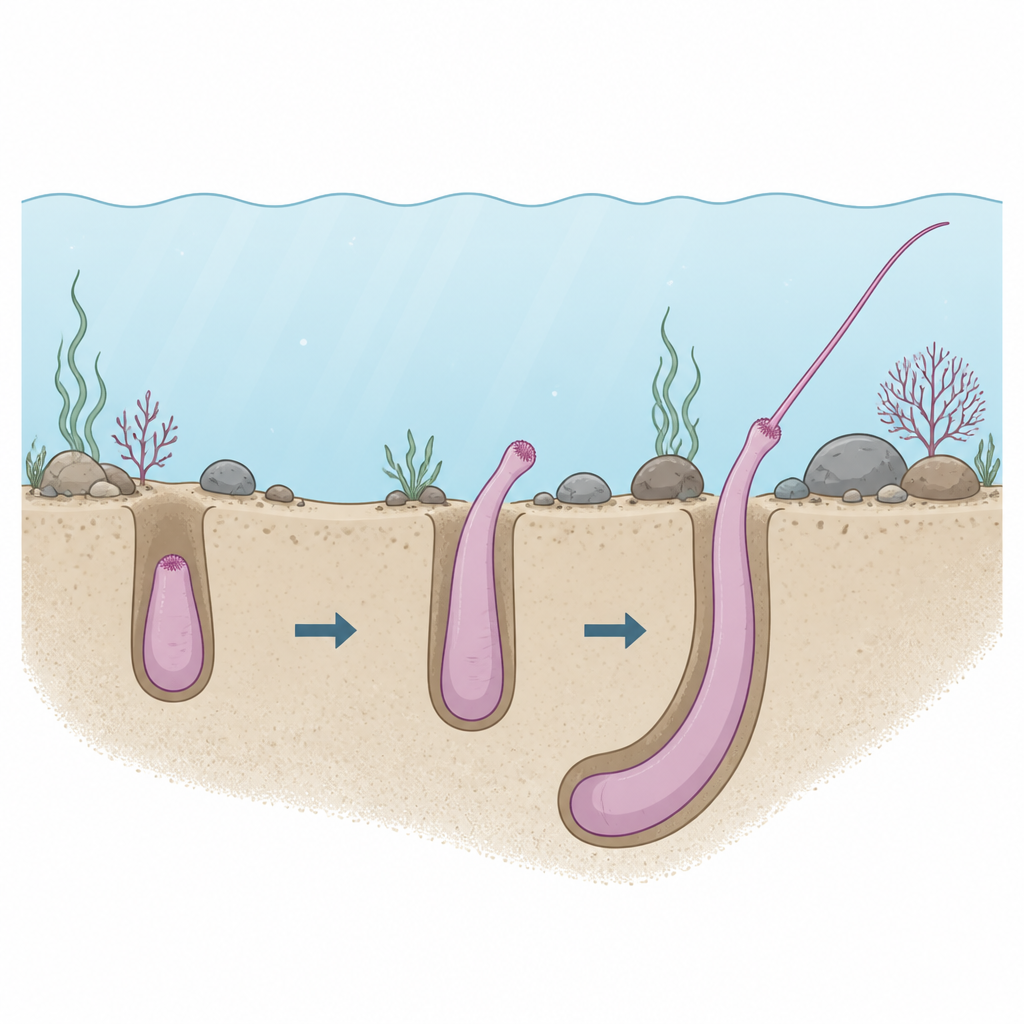
Os pesquisadores focaram em um pequeno verme marinho chamado Phascolosoma stephensoni. À primeira vista parece um tubo sem traços, mas por dentro há uma única cavidade cheia de fluido que funciona como um esqueleto à base de água. O corpo tem duas partes principais: um tronco mais espesso que abriga os órgãos e uma região frontal mais fina chamada introverto. O introverto se comporta como uma manga dobrada para dentro que pode ser invertida para formar uma ponta longa e investigadora. Usando tomografias de raios X de alta resolução, a equipe mapeou os músculos e a cavidade interna do verme em diferentes posturas, do totalmente retraído ao totalmente estendido. Eles descobriram que o tronco quase não muda de comprimento durante o movimento, enquanto o comprimento total do corpo pode mais que dobrar porque o introverto desenrola e afina ao sair.
Como um tubo macio se impulsiona para frente
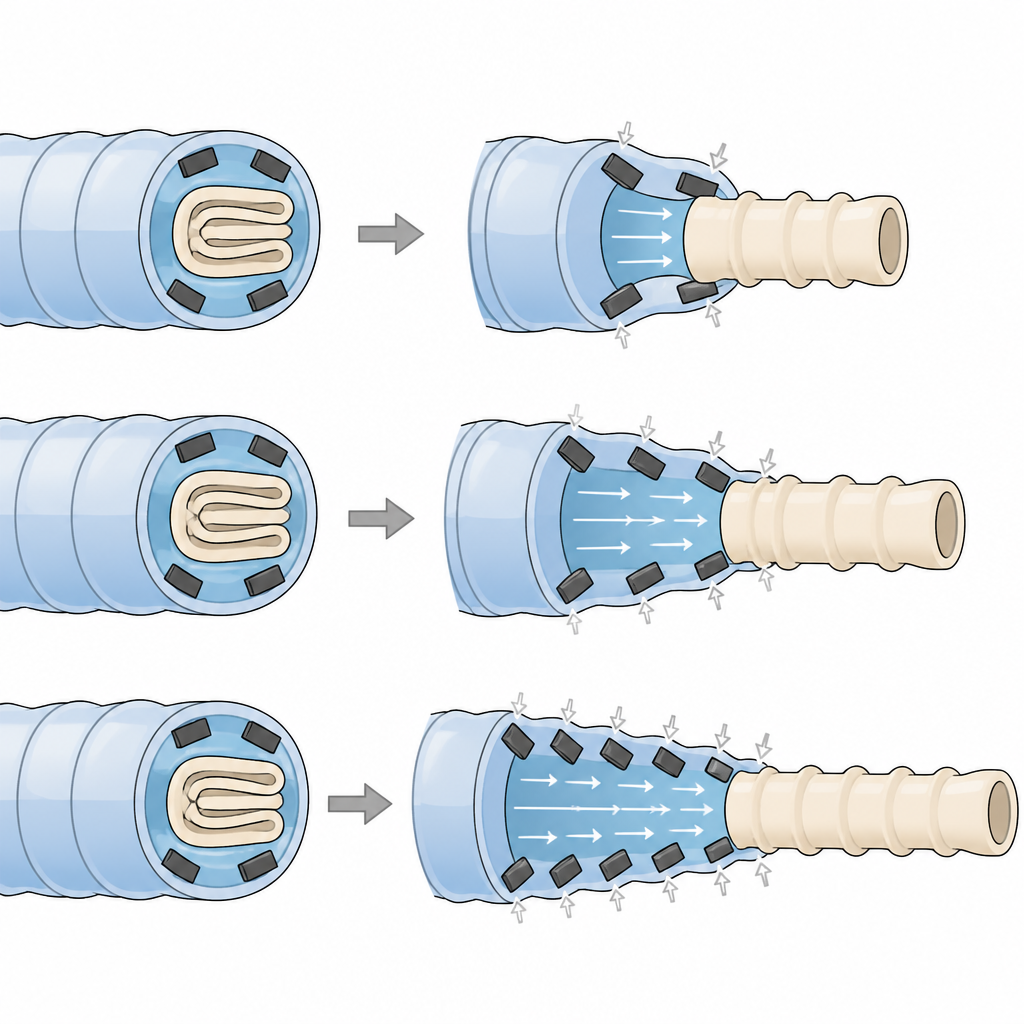
O segredo dessa manobra é o uso do fluido interno e das camadas musculares pelo verme. Músculos circulares ao redor do tronco comprimem-no ligeiramente, o que eleva a pressão interna do fluido. Como o volume total permanece quase constante, esse fluido pressurizado é empurrado para frente, para o introverto, forçando-o a eversar e se estender, muito parecido com pasta de dente saindo de um tubo. Músculos reatores especiais que vão da parte traseira do tronco até a ponta do introverto então o puxam de volta rapidamente, uma defesa útil contra predadores. Testes mecânicos nos tecidos mostraram que o tronco pode esticar mais do que o introverto e suportar tensões maiores, tornando-o bem adequado como uma bomba de pressão, enquanto o introverto, mais rígido e em forma de cone, é melhor para extensão controlada por desenrolamento em vez de por grande alongamento.
Observando minhocas se moverem e convertendo o movimento em matemática
Para entender como esses animais rastejam e cavam, os cientistas filmaram vermes vivos movendo-se por canais estreitos preenchidos com gel que imitam areia ou lama compactadas. Nesses espaços confinados o movimento do corpo é quase bidimensional, permitindo medidas precisas das mudanças de forma e velocidades. As minhocas se moveram usando peristalse, enviando ondas de constrição e alargamento ao longo do corpo para progredir, mesmo sem os segmentos distintos que muitos outros vermes possuem. A equipe construiu um modelo matemático que trata o verme como uma barra contínua cuja extensão muda localmente no tempo e no espaço. Ao combinar isso com medições de como o gel resiste à penetração, o modelo reproduziu o movimento por etapas visto nos vídeos, com velocidades similares de cerca de meio a cinco milímetros por segundo.
Do escavador do leito marinho ao robô macio
Munidos dessa compreensão biológica, os pesquisadores construíram um protótipo de robô macio que imita o truque hidráulico da minhoca. O robô tem um tronco externo muito macio cheio de água e uma manga interna fina e mais rígida que copia o introverto. Ao redor do tronco foram inseridas quatro regiões de silicone contendo pequenos ímãs permanentes. Quando um campo magnético externo é aplicado, essas regiões dobram-se para dentro como músculos circulares artificiais, comprimindo o tronco e empurrando água para a manga interna. Isso faz com que a manga everse e protruda, estendendo o robô para cerca de duas a duas vezes e meia seu comprimento original. Quando o campo é reduzido, tiras elásticas macias puxam a manga de volta, muito parecido com os músculos reatores do verme. Como o robô é inteiramente macio e acionado sem fio por magnetismo, ele não precisa de eletrônica interna ou partes rígidas.
Por que isso importa para as máquinas macias do futuro
Este trabalho mostra que um verme aparentemente simples e não segmentado pode fornecer um rico guia de projeto para robótica macia. Ao medir cuidadosamente a anatomia, a mecânica dos tecidos e o movimento em ambientes realistas, o estudo explica como grandes mudanças de forma e locomoção podem surgir de um corpo contínuo que redistribui fluido interno em vez de depender de juntas. O protótipo acionado magneticamente demonstra que esses princípios podem ser traduzidos em um dispositivo prático capaz de grande extensão controlada usando apenas forma, materiais e um campo externo. Abordagens assim podem inspirar novas ferramentas macias que navegam em espaços apertados, bombeiam fluidos dentro de sistemas selados ou adaptam sua forma em resposta ao ambiente, mantendo-se gentis e inerentemente seguras.
Citação: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
Palavras-chave: robótica macia, minhocas marinhas, esqueleto hidrostático, acionamento magnético, design bioinspirado