Clear Sky Science · de
Unsegmentierte marine Anneliden als biomechanische Vorbilder für Soft-Robotik
Würmer, die sich wie lebende Maschinen strecken
Stellen Sie sich ein Lebewesen vor, das seine Länge mehr als verdoppeln, sich durch enge Spalten zwängen und in den Meeresboden eingraben kann — und das alles ohne Gelenke. Diese Studie untersucht solche Meereswürmer, um einfache mechanische Tricks zu entschlüsseln, die Ingenieuren helfen könnten, weichere und sicherere Roboter für Anwendungen wie medizinische Instrumente, Unterwassererkundung oder schonende Industrieprozesse zu entwickeln.
Ein einfacher Körper mit cleverer versteckter Hülle
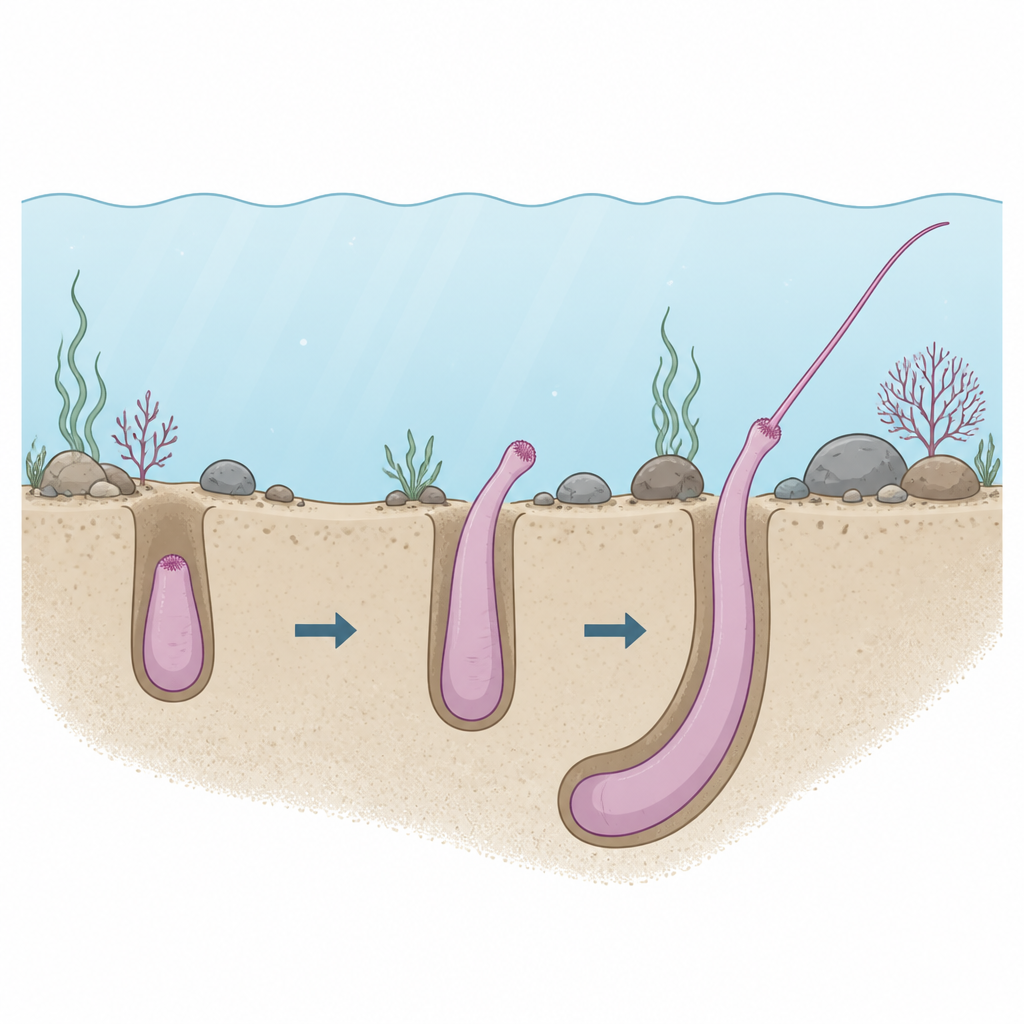
Die Forschenden konzentrierten sich auf einen kleinen Meereswurm namens Phascolosoma stephensoni. Auf den ersten Blick sieht er wie ein unscheinbarer Schlauch aus, doch im Inneren besitzt er eine einzige flüssigkeitsgefüllte Höhle, die als wasserbasiertes Skelett dient. Der Körper besteht aus zwei Hauptteilen: einem dickeren Rumpf, der die Organe beherbergt, und einem dünneren vorderen Bereich, dem Introvert. Das Introvert verhält sich wie eine eingezogene Hülle, die sich umstülpen kann, um eine lange, tastende Spitze zu bilden. Mithilfe hochauflösender Röntgenscans kartierte das Team die Muskeln und die innere Höhle des Wurms in verschiedenen Posen, vom vollständig eingezogenen bis zum komplett ausgestreckten Zustand. Sie fanden heraus, dass sich der Rumpf während der Bewegung kaum in der Länge verändert, während die Gesamtlänge sich mehr als verdoppeln kann, weil sich das Introvert beim Herausfahren abrollt und verjüngt.
Wie ein weicher Schlauch sich vorwärts schiebt
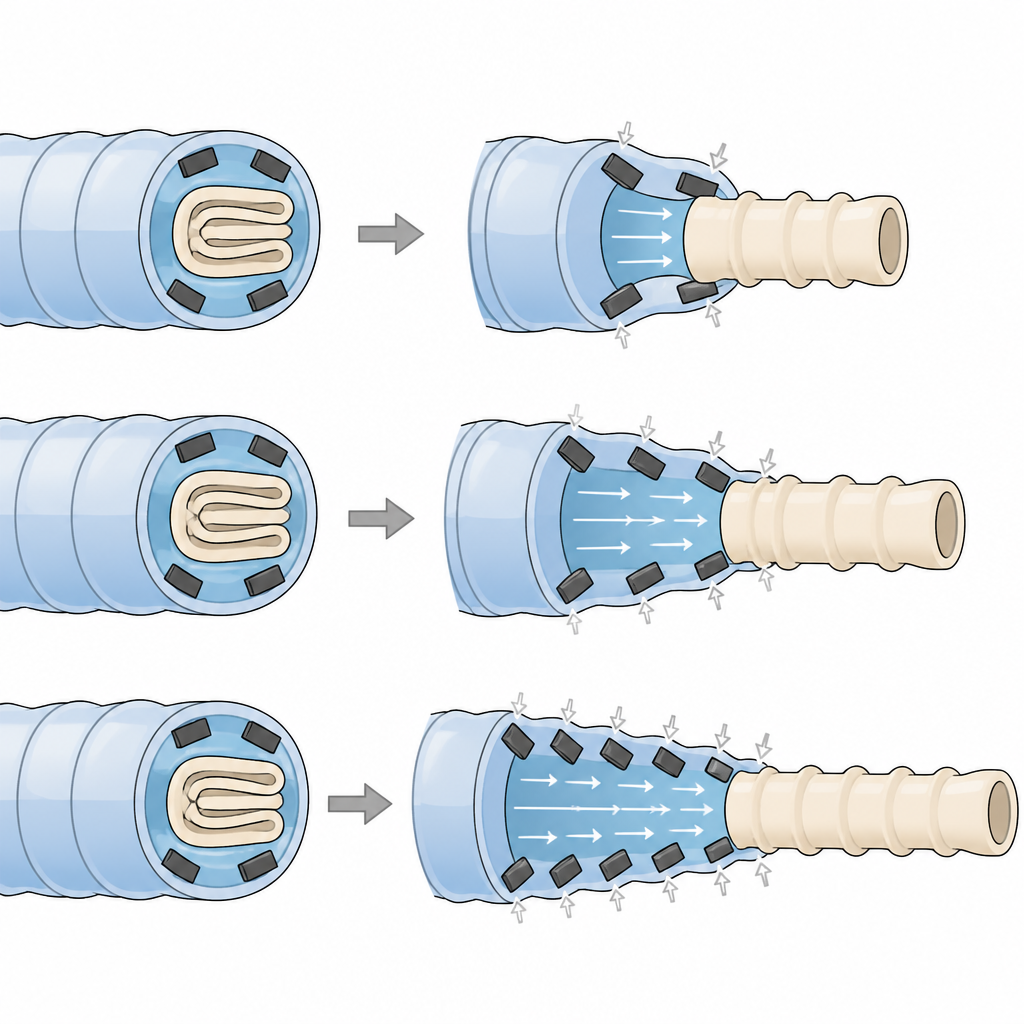
Der Schlüssel zu diesem Trick liegt in der Nutzung der inneren Flüssigkeit und der Muskelschichten des Wurms. Ringmuskeln, die den Rumpf umschließen, drücken ihn leicht zusammen und erhöhen so den Innendruck der Flüssigkeit. Da das Gesamtvolumen annähernd konstant bleibt, wird diese unter Druck stehende Flüssigkeit in Richtung Introvert gedrückt und zwingt es, sich auszustülpen und zu verlängern — ähnlich wie Zahnpasta aus einer Tube. Spezielle Retraktormuskeln, die vom hinteren Rumpf bis zur Spitze des Introverts verlaufen, ziehen es anschließend schnell wieder ein, eine nützliche Verteidigungsreaktion gegen Fressfeinde. Mechanische Tests am Gewebe zeigten, dass der Rumpf stärker dehnbar ist und höhere Spannungen aushält als das Introvert, wodurch er sich gut als Druckpumpe eignet, während das steifere, konisch geformte Introvert besser kontrolliert durch Abrollen verlängert werden kann, statt durch starke Dehnung.
Würmer beobachten und Bewegung in Mathematik übersetzen
Um nachzuvollziehen, wie diese Tiere kriechen und graben, filmten die Wissenschaftler lebende Würmer, die durch enge, mit Gel gefüllte Kanäle krochen, welche verdichteten Sand oder Schlamm nachahmen. In diesen begrenzten Räumen ist die Körperbewegung nahezu zweidimensional, was präzise Messungen von Formänderungen und Geschwindigkeiten ermöglicht. Die Würmer bewegten sich peristaltisch, indem sie Wellen von Verengung und Weitung entlang ihres Körpers schickten, um vorwärts zu kriechen, obwohl ihnen die ausgeprägten Segmente fehlen, die viele andere Würmer haben. Das Team entwickelte ein mathematisches Modell, das den Wurm als kontinuierliche Stange behandelt, deren Länge sich lokal in Raum und Zeit ändert. In Kombination mit Messungen, wie das Gel dem Eindringen widersteht, reproduzierte das Modell die schrittweise Vorwärtsbewegung aus den Videos mit ähnlichen Geschwindigkeiten von etwa einem halben bis fünf Millimetern pro Sekunde.
Vom Meeresbodenbewohner zum Soft‑Roboter
Ausgestattet mit diesen biologischen Erkenntnissen bauten die Forschenden einen weichen Roboterprototyp, der den hydraulischen Trick des Wurms nachahmt. Der Roboter besitzt einen sehr weichen äußeren Rumpf, der mit Wasser gefüllt ist, und eine dünnere, steifere innere Hülle, die das Introvert kopiert. Um den Rumpf herum integrierten sie vier Silikonbereiche mit winzigen Permanentmagneten. Wird ein externes Magnetfeld angelegt, biegen sich diese Bereiche nach innen wie künstliche Ringmuskeln, quetschen den Rumpf zusammen und drücken das Wasser in die innere Hülle. Das bewirkt, dass sich die Hülle ausstülpt und hervortritt und den Roboter auf etwa zweieinhalbfacher Ausgangslänge erweitert. Wird das Feld reduziert, ziehen weiche elastische Streifen die Hülle wieder zurück, ähnlich den Retraktormuskeln des Wurms. Da der Roboter vollständig weich ist und drahtlos durch Magnetismus angetrieben wird, benötigt er keine interne Elektronik oder starre Bauteile.
Warum das für zukünftige weiche Maschinen wichtig ist
Diese Arbeit zeigt, dass ein scheinbar einfacher, unsegmentierter Wurm eine reiche Entwurfsgrundlage für die Soft‑Robotik liefern kann. Durch sorgfältige Vermessung von Anatomie, Gewebemechanik und Bewegung in realistischen Umgebungen erklärt die Studie, wie große Formänderungen und Kriechen aus einem kontinuierlichen Körper entstehen können, der interne Flüssigkeit umverteilt, statt auf Gelenke zu setzen. Der magnetisch angetriebene Prototyp beweist, dass sich diese Prinzipien in ein praktisches Gerät übersetzen lassen, das mithilfe von Form, Materialien und einem äußeren Feld große, kontrollierte Ausfahrbewegungen ausführt. Solche Konzepte könnten neue weiche Werkzeuge inspirieren, die sich durch enge Passagen manövrieren, Flüssigkeiten in versiegelten Systemen pumpen oder ihre Form an die Umgebung anpassen — und das alles auf schonende und von Natur aus sichere Weise.
Zitation: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
Schlüsselwörter: Soft-Robotik, Meereswürmer, hydrostatisches Skelett, magnetische Aktuation, bioinspiriertes Design