Clear Sky Science · it
Anellidi marini non segmentati come modelli biomeccanici per la robotica morbida
Vermi che si allungano come macchine viventi
Immaginate una creatura che può più che raddoppiare la sua lunghezza, passare attraverso spazi stretti e scavare nel fondale marino, tutto senza alcuna giuntura. Questo studio esamina tali vermi marini per svelare semplici stratagemmi meccanici che potrebbero aiutare gli ingegneri a costruire robot più morbidi e sicuri per compiti come strumenti medicali, esplorazione subacquea o manipolazione delicata in ambito industriale.
Un corpo semplice con un intelligente manicotto nascosto
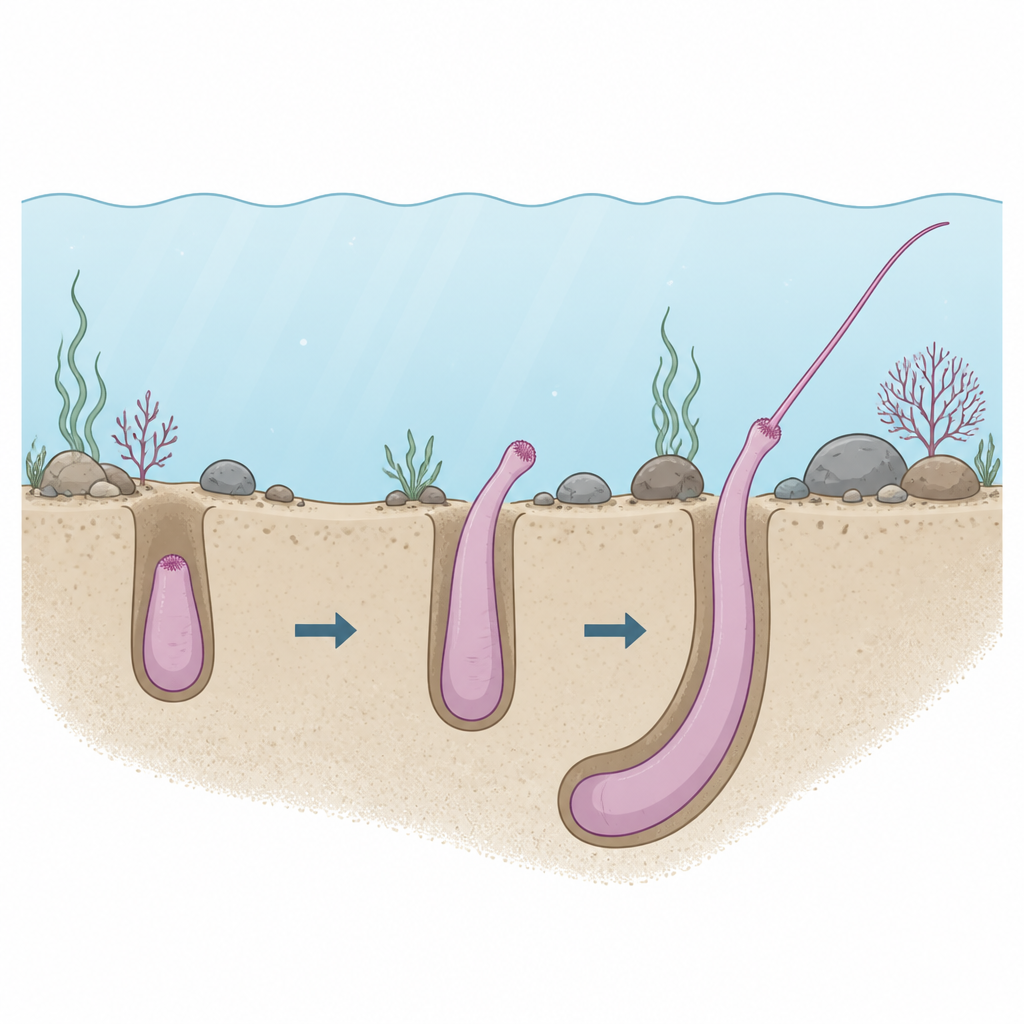
I ricercatori si sono concentrati su un piccolo verme marino chiamato Phascolosoma stephensoni. A prima vista sembra un tubo privo di dettagli, ma all’interno ha una singola cavità riempita di fluido che funziona come uno scheletro a base d’acqua. Il corpo ha due parti principali: un tronco più spesso che ospita gli organi e una regione anteriore più sottile chiamata introverto. L’introverto si comporta come un manicotto ripiegato che può essere estroflesso per formare una lunga punta esplorativa. Usando scansioni a raggi X ad alta risoluzione, il team ha mappato i muscoli e la cavità interna del verme in diverse pose, dal completamente ritratt o al completamente esteso. Hanno scoperto che il tronco cambia pochissimo lunghezza durante il movimento, mentre la lunghezza totale del corpo può più che raddoppiare perché l’introverto si srotola e si assottiglia quando fuoriesce.
Come un tubo morbido si spinge in avanti
La chiave di questo trucco è il modo in cui il verme usa il suo fluido interno e gli strati muscolari. Muscoli circolari avvolti attorno al tronco lo comprimono leggermente, aumentando la pressione interna del fluido. Poiché il volume totale rimane quasi costante, quel fluido pressurizzato viene spinto in avanti nell’introverto, costringendolo a eversione ed estensione, proprio come il dentifricio che esce da un tubetto. Muscoli retrattori speciali, che corrono dalla parte posteriore del tronco fino alla punta dell’introverto, poi lo tirano rapidamente indietro, una difesa utile contro i predatori. Test meccanici sui tessuti hanno mostrato che il tronco può allungarsi più dell’introverto e sopportare stress maggiori, rendendolo adatto a funzionare come pompa di pressione, mentre l’introverto più rigido e a forma conica è migliore per un’estensione controllata tramite srotolamento piuttosto che per un forte allungamento.
Osservare i vermi muoversi e trasformare il moto in matematica
Per capire come questi animali strisciano e scavano, gli scienziati hanno filmato vermi vivi che si muovevano attraverso canali stretti riempiti di gel che imitano sabbia o fango compatti. In questi spazi confinati il movimento del corpo è quasi bidimensionale, permettendo misure precise dei cambiamenti di forma e delle velocità. I vermi si muovevano usando la peristalsi, inviando onde di restringimento e allargamento lungo il corpo per avanzare a piccoli passi, nonostante mancassero dei segmenti distinti che molti altri vermi possiedono. Il team ha costruito un modello matematico che tratta il verme come una barra continua la cui lunghezza varia localmente nel tempo e nello spazio. Combinando questo con misure della resistenza del gel alla penetrazione, il modello ha riprodotto il moto a passi avanti visto nei video, con velocità simili di circa mezzo fino a cinque millimetri al secondo.
Dal scavatore del fondale al robot morbido
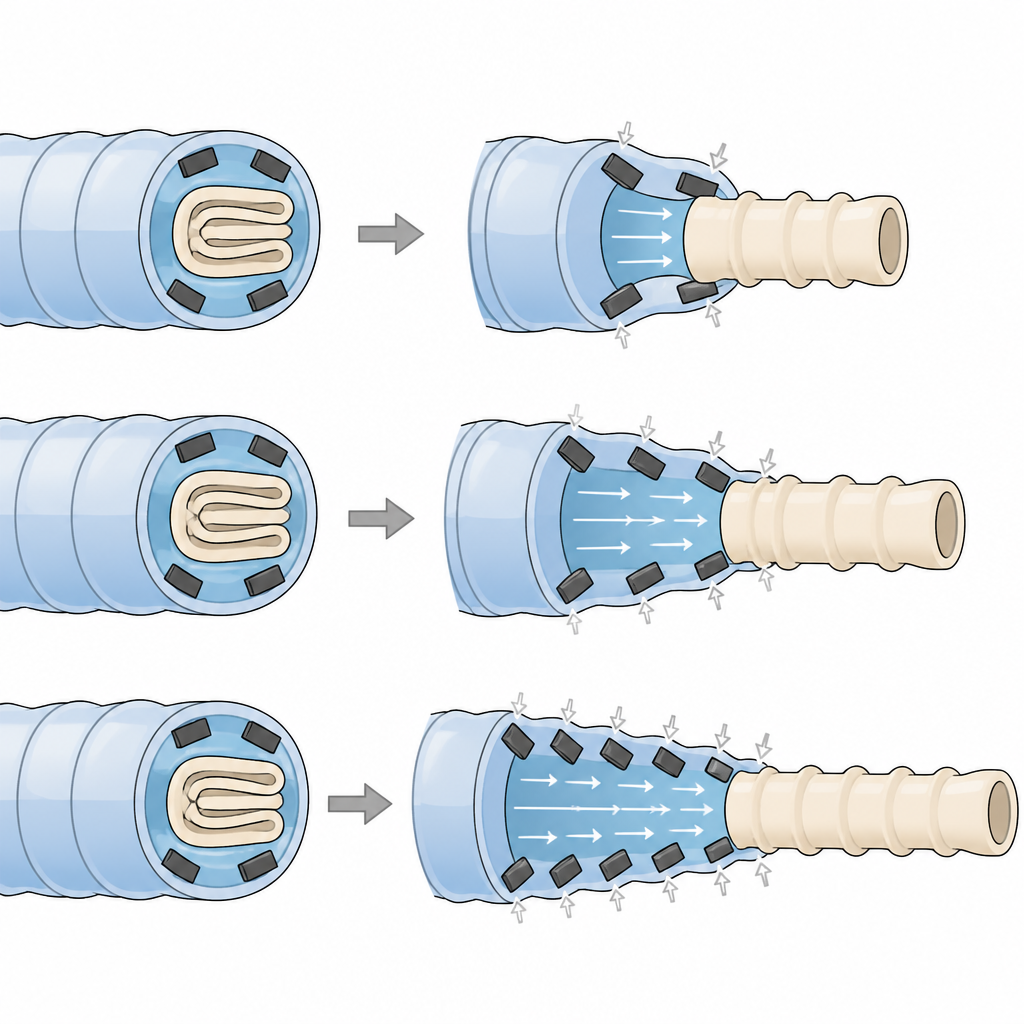
Armati di questa intuizione biologica, i ricercatori hanno costruito un prototipo di robot morbido che imita l’escamotage idraulico del verme. Il robot ha un tronco esterno molto morbido riempito d’acqua e un sottile manicotto interno più rigido che copia l’introverto. Intorno al tronco hanno inserito quattro regioni di silicone contenenti piccoli magneti permanenti. Quando viene applicato un campo magnetico esterno, queste regioni si piegano verso l’interno come muscoli circolari artificiali, comprimendo il tronco e spingendo l’acqua nel manicotto interno. Questo provoca l’eversione e la protrusione del manicotto, estendendo il robot fino a circa due volte e mezzo la sua lunghezza originale. Quando il campo viene ridotto, strisce elastiche morbide richiudono il manicotto, proprio come i muscoli retrattori del verme. Poiché il robot è interamente morbido e azionato senza fili tramite magnetismo, non richiede elettronica interna o parti rigide.
Perché questo è importante per le future macchine morbide
Questo lavoro dimostra che un verme apparentemente semplice e non segmentato può fornire una ricca guida di progetto per la robotica morbida. Misurando con cura anatomia, meccanica dei tessuti e movimento in ambienti realistici, lo studio spiega come grandi cambiamenti di forma e la locomozione possano emergere da un corpo continuo che ridistribuisce il fluido interno invece di affidarsi a giunture. Il prototipo azionato magneticamente dimostra che questi principi possono essere tradotti in un dispositivo pratico capace di ampie estensioni controllate usando solo forma, materiali e un campo esterno. Tali approcci potrebbero ispirare nuovi strumenti morbidi che navigano in spazi angusti, pompano fluidi all’interno di sistemi sigillati o adattano la loro forma in risposta all’ambiente, tutto restando delicati e intrinsecamente sicuri.
Citazione: Paternò, L., Langeneck, J., Keklikoglou, K. et al. Unsegmented marine annelids as biomechanical models for soft robotics. Sci Rep 16, 15033 (2026). https://doi.org/10.1038/s41598-026-44047-w
Parole chiave: robotica morbida, vermi marini, scheletro idrostatico, attivazione magnetica, design bioispirato