Clear Sky Science · zh
通过自适应有限时间反步与状态观测对电液静力致动器的位置跟踪控制
让重型机械平稳运转
从飞机和舰船到工程机械,现代设备通常依赖强劲的液压致动器以毫米级精度移动重载部件。但现实工况并不理想:负载会突然变化,传感器受限,摩擦和流体效应会使运动偏离目标。本文提出了一种新的控制方法,针对一种称为对称缸电液静力致动器的液压驱动,使其在这些挑战性条件下仍能快速且准确地到达期望位置。
为何液压运动控制很难
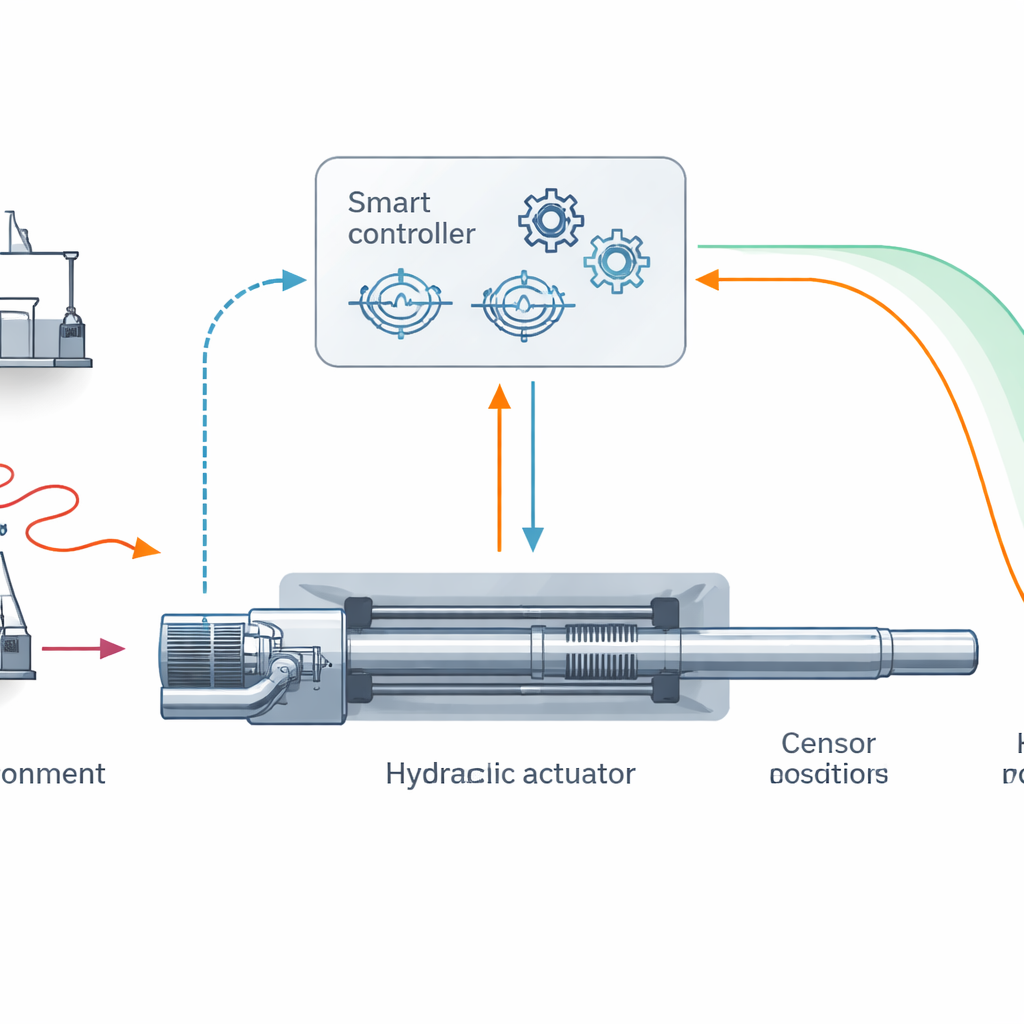
电液静力致动器将电伺服阀、液压油和活塞结合,形成紧凑且动力强劲的运动系统,适合对响应速度和可靠性要求高的行业。然而,它们的行为高度非线性:油液可压缩、泄漏并升温;外界载荷变化;且通常只有部分量(如位置)易于测量。许多现有控制方法依赖多个传感器和复杂模型,这既增加成本,又难以在扰动发生时保证致动器在确定时间内达到目标位置。
更智能的控制策略,传感器更少
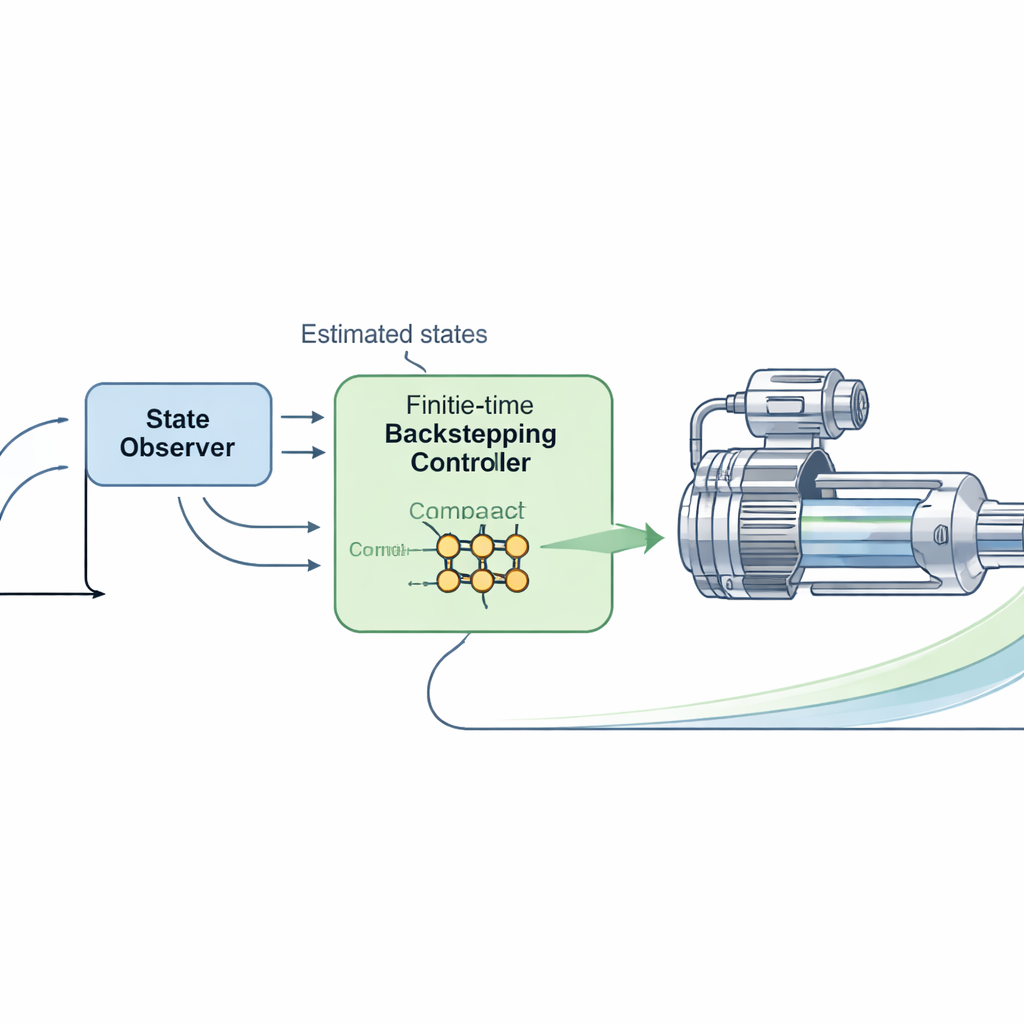
作者提出的控制策略旨在用更少的硬件实现更多功能。与其测量多个内部变量,他们假设仅能获得活塞位置。一个状态观测器——实际系统的数学“孪生体”——从这一测量重构隐藏的内部状态。在此基础上,他们设计了一个“有限时间”反步控制器。不同于只保证误差逐步收缩的传统方案,有限时间控制被构造成在可计算的时间内保证跟踪误差进入接近零的小区间,即便系统受到扰动。
用神经网络但不致密计算负担
由于液压动力学的许多细节不确定或随时间变化,控制器必须在线自适应。团队使用径向基函数神经网络来逼近这些未知项,但避免了通常的计算负担:他们关注的是一个单一量——网络权重向量的最大范数。该“最大范数”自适应律减少了需要实时调整的参数数量,同时保持网络捕捉复杂行为的能力。因此,控制器更易在实际硬件上实现,同时仍能有效处理非线性和扰动。
理论证明,再到仿真与硬件验证
在数学上,作者使用李雅普诺夫理论分析了观测器—控制器的耦合系统,这是研究稳定性的标准工具。他们证明了在有界扰动存在的情况下,观测器估计误差、位置跟踪误差以及神经网络的自适应误差均能在有限时间内收敛到靠近零的小邻域。随后他们在计算机仿真中测试了该设计,致动器在强时变扰动下跟随正弦位置指令。与另外两种先进方法——神经网络反步控制器和神经网络辅助PID控制器相比,新方法在标准差、平均误差和最大误差上均表现最好。
带有高要求动作的实物测试
研究者进一步在实验室的电液静力测试台上实现了他们的控制器,该台仅使用位置传感器。他们运行了两个具有挑战性的场景:稳步上升的斜坡运动和快速变化的正弦运动。在两种情况下,观测器均能从单一位置信号成功重构内部状态,使控制器能够及时响应。所提方法持续比对照控制器提供更紧的跟踪,平均误差和峰值误差更低。但更高的精度有代价:控制信号更具能量并表现出明显的高频动作,反映出用于抑制扰动的强烈修正。
对未来机械的意义
简而言之,这项工作表明,重载液压驱动可以在传感器更少且无完美数学模型的情况下被更快、更精确地控制。通过将快速收敛的控制结构、精简的神经网络自适应律和状态观测器结合,作者在理论与实验上证明了电液静力致动器能以比竞争方法更小的误差追踪高要求的运动指令。这些进展可能转化为更精确的工业机器人、更安全的飞行器执行系统和更高效的工程机械。未来研究将致力于优化控制器增益的整定并减小抖振,以便将这些优势更好地推向实际产品部署。
引用: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
关键词: 电液静力致动器, 液压运动控制, 自适应控制, 有限时间稳定性, 神经网络观测器