Clear Sky Science · ar
التحكّم في تتبّع الموضع لمشغلات كهرهيدرواستاتيكية عبر الإقحام الارتدادي متناهي الزمن والتقدير الحُـالـي للحالة
حافظوا على حركة الآلات الثقيلة بسلاسة
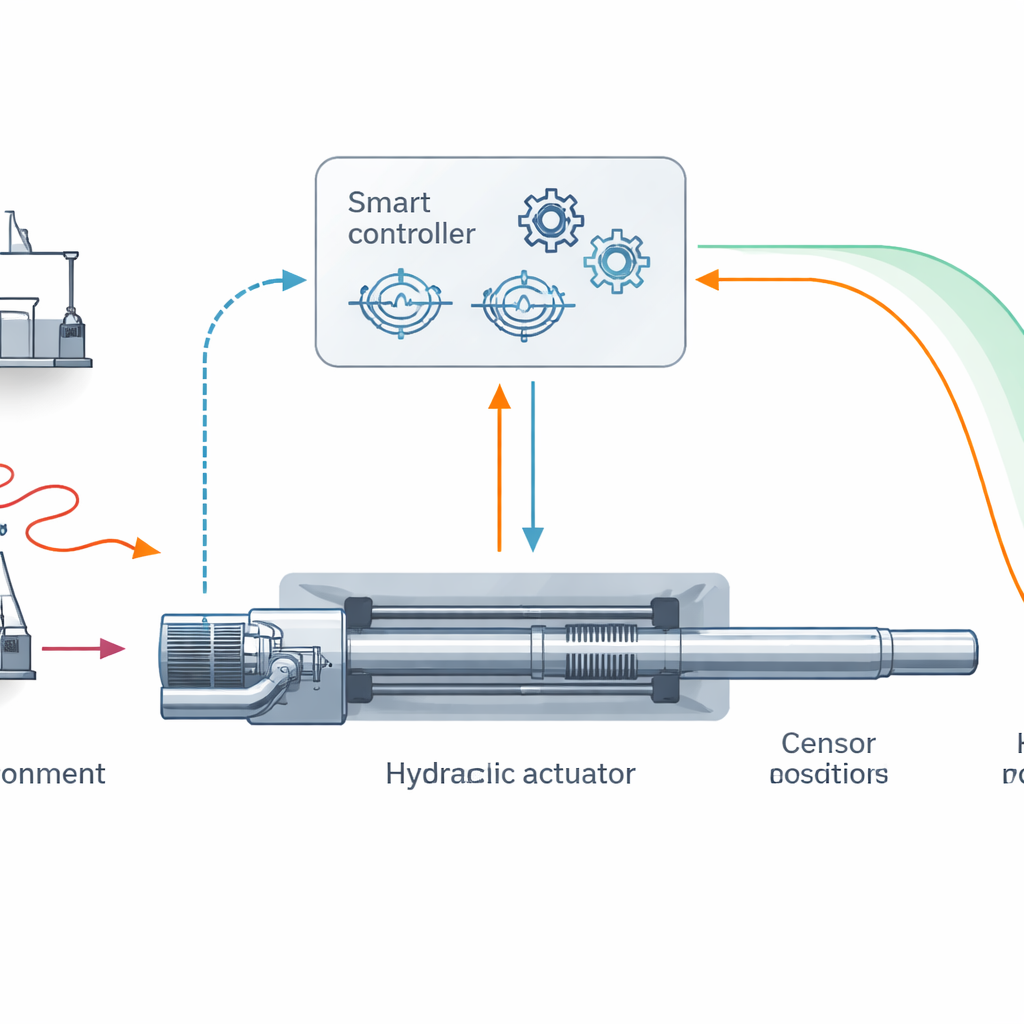
تعتمد الآلات الحديثة — من الطائرات والسفن إلى معدات البناء — في كثير من الأحيان على مشغلات هيدروليكية قوية لتحريك أجزاء ثقيلة بدقة على مستوى المليمتر. لكن ظروف العالم الحقيقي معقّدة: الأحمال تتغير فجأة، وأعداد الحساسات محدودة، والاحتكاك وتأثيرات السوائل قد تُخرب المسار. يقدم هذا البحث طريقة جديدة للتحكم بنوع معيّن من المحركات الهيدروليكية المسمى مشغلًا كهرهيدرواستاتيكيًا ذو أسطوانة متناظرة، بحيث يصل إلى الموضع المطلوب بسرعة ودقة حتى في ظل مثل هذه الظروف الصعبة.
لماذا التحكم في الحركة الهيدروليكية صعب
يجمع المشغل الكهرهيدرواستاتيكي بين صمام سيرفو كهربائي، وسائل هيدروليكي، ومكبس ليكوّن أنظمة حركة قوية ومضغوطة. وهذه المزايا تجعله جذابًا للصناعات التي تطلب استجابة سريعة وموثوقية عالية. ومع ذلك، فإن سلوكه شديد اللاخطية: الزيت ينضغط ويتسرب ويسخن؛ الأحمال الخارجية تتغير؛ وفقط بعض المتغيرات — عادة الموضع — يسهل قياسها. كثير من طرق التحكم الحالية تستخدم حساسات متعددة ونماذج معقّدة، مما يرفع التكلفة ودائمًا لا يضمن وصول المشغل إلى الموضع المستهدف ضمن زمن محدد عند حدوث اضطرابات.
استراتيجية تحكّم أذكى بعدد أقل من الحساسات
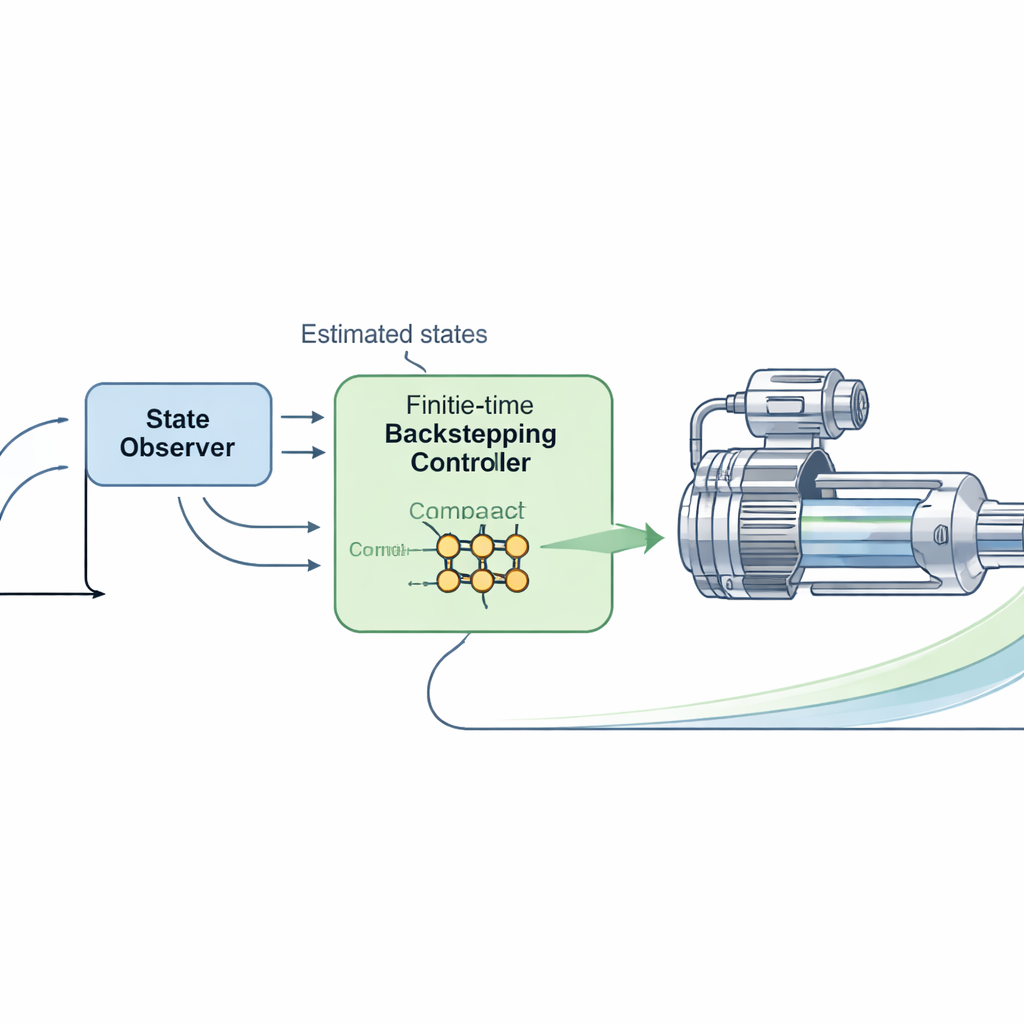
يقترح المؤلفون استراتيجية تحكم تهدف إلى القيام بالمزيد بمعدات أقل. بدلاً من قياس عدة متغيرات داخلية، يفترضون أن موضع المكبس فقط هو المتاح. يقوم مُراقِب للحالة، وهو نظير رياضي للنظام الحقيقي، بإعادة بناء الحالات الداخلية المخفية من هذا القياس الوحيد. وعلى هذا الأساس يصممون متحكّم إقحام ارتدادي «متناهي الزمن». على عكس المخططات التقليدية التي تعد فقط بأن الخطأ سيتناقص تدريجيًا، فالمتحكّم متناهي الزمن مبني بحيث يضمن أن خطأ التتبع سيدخل نطاقًا صغيرًا حول الصفر خلال زمن يمكن حسابه، حتى عندما يتعرّض النظام لاضطرابات.
استخدام الشبكات العصبية بدون عبء حسابي كبير
نظرًا لأن العديد من تفاصيل ديناميكيات الهيدروليك غير مؤكدة أو تتغير مع الزمن، يجب أن يتكيف المتحكّم أثناء التشغيل. يستخدم الفريق شبكة عصبية ذات دالة أساس شعاعية لتقريب هذه التأثيرات المجهولة، لكنهم يتجنّبون عبء الحساب المعتاد بالتركيز على كمية واحدة: المعامل الأعظمي لأوزان الشبكة. يقلّل قانون التكيف القائم على «المعيار الأعظمي» هذا من عدد المعلمات التي يجب تعديلها في الزمن الحقيقي مع المحافظة على قدرة الشبكة العصبية على التقاط السلوك المعقّد. ونتيجة لذلك يصبح تنفيذ المتحكّم أسهل على الأجهزة العملية بينما يظل قادرًا على التعامل مع اللاخطيات والاضطرابات بفعالية.
برهان نظري، ثم محاكاة وتجارب عملية
رياضيًا، يحلل المؤلفون النظام المجمّع للمراقب والمتحكّم باستخدام نظرية ليابونوف، وهي أداة معيارية لدراسة الثبات. يوضحون أن أخطاء التقدير للمراقب، وخطأ تتبّع الموضع، وخطأ تكييف الشبكة العصبية كلها تتقارب إلى جوارٍ صغير حول الصفر في زمن متناهي، حتى في وجود اضطرابات محدودة. ثم يختبرون التصميم في محاكاة حاسوبية، حيث يتبع المشغل أمر موضع جيبي تحت اضطرابات قوية ومتغيرة زمنياً. بالمقارنة مع طريقتين متقدمتين أخريين — متحكّم إقحام ارتدادي مدعوم بشبكة عصبية ومتحكّم PID بمساعدة شبكة عصبية — يحقق النهج الجديد أصغر انحراف معياري، ومتوسط خطأ، وخطأ أقصى.
اختبارات واقعية بحركات متطلبة
يتقدم الباحثون خطوة أخرى بتطبيق متحكّمهم على منصة اختبار كهرهيدرواستاتيكية مخبرية تستخدم مستشعر موضع واحد فقط. ينفذون سيناريوهين تحديين: حركة تسارع تدريجي متزايد وحركة جيبية سريعة التغير. في كلتا الحالتين يعيد المراقب بنجاح بناء الحالات الداخلية من إشارة الموضع الوحيدة، مما يمكّن المتحكّم من الاستجابة بسرعة. تقدم الطريقة المقترحة باستمرار تتبّعًا أدق من المتحكّمات المقارنة، مع انخفاض في متوسط الخطأ والذروة. هذه الدقة المحسنة تأتي بثمن: إشارة التحكم أكثر نشاطًا وتظهر مكونات عالية التردد ملحوظة، مما يعكس التصحيحات القوية المستخدمة لرفض الاضطرابات.
ما الذي يعنيه هذا لآلات المستقبل
بكلمات بسيطة، يظهر هذا العمل أن محركات الهيدروليك الثقيلة يمكن التحكم فيها بدقة وسرعة أكبر، باستخدام حساسات أقل ودون نموذج رياضي مثالي. من خلال الجمع بين بنية تحكم سريعة التقارب، وقاعدة تكيف خفيفة للشبكة العصبية، ومراقب للحالة، يُظهر المؤلفون نظريًا وتجريبيًا أن المشغل الكهرهيدرواستاتيكي يمكنه تتبّع أوامر حركة متطلبة بأخطاء أصغر من الطرق المنافسة. قد تترجم هذه التقدّمات إلى روبوتات صناعية أدق، وأنظمة تشغيل طائرات أكثر أمانًا، وآلات بناء أكثر كفاءة. سيسعى البحث المستقبلي إلى تحسين ضبط مكاسب المتحكّم وتقليل الاهتزازات الصغيرة (chattering)، لدفع هذه الفوائد أقرب إلى التطبيق في المنتجات الواقعية.
الاستشهاد: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
الكلمات المفتاحية: مشغل كهرهيدرواستاتيكي, التحكّم بالحركة الهيدروليكية, التحكّم التكيفي, الثبات متناهي الزمن, مقارِب شبكة عصبية للمُراقب