Clear Sky Science · es
Control de seguimiento de posición de actuadores electro-hidrostáticos mediante backstepping adaptativo en tiempo finito y observación de estados
Mantener las máquinas pesadas en movimiento suave
Las máquinas modernas —desde aeronaves y buques hasta equipos de construcción— a menudo dependen de potentes actuadores hidráulicos para mover piezas pesadas con precisión de nivel milimétrico. Pero las condiciones reales son desordenadas: las cargas cambian de forma repentina, los sensores son limitados y la fricción y los efectos del fluido pueden desviar el movimiento del objetivo. Este artículo presenta una nueva forma de controlar un tipo particular de accionamiento hidráulico, llamado actuador electro-hidrostático con cilindro simétrico, de modo que alcance la posición deseada rápida y precisamente incluso bajo condiciones tan exigentes.
Por qué es difícil controlar el movimiento hidráulico
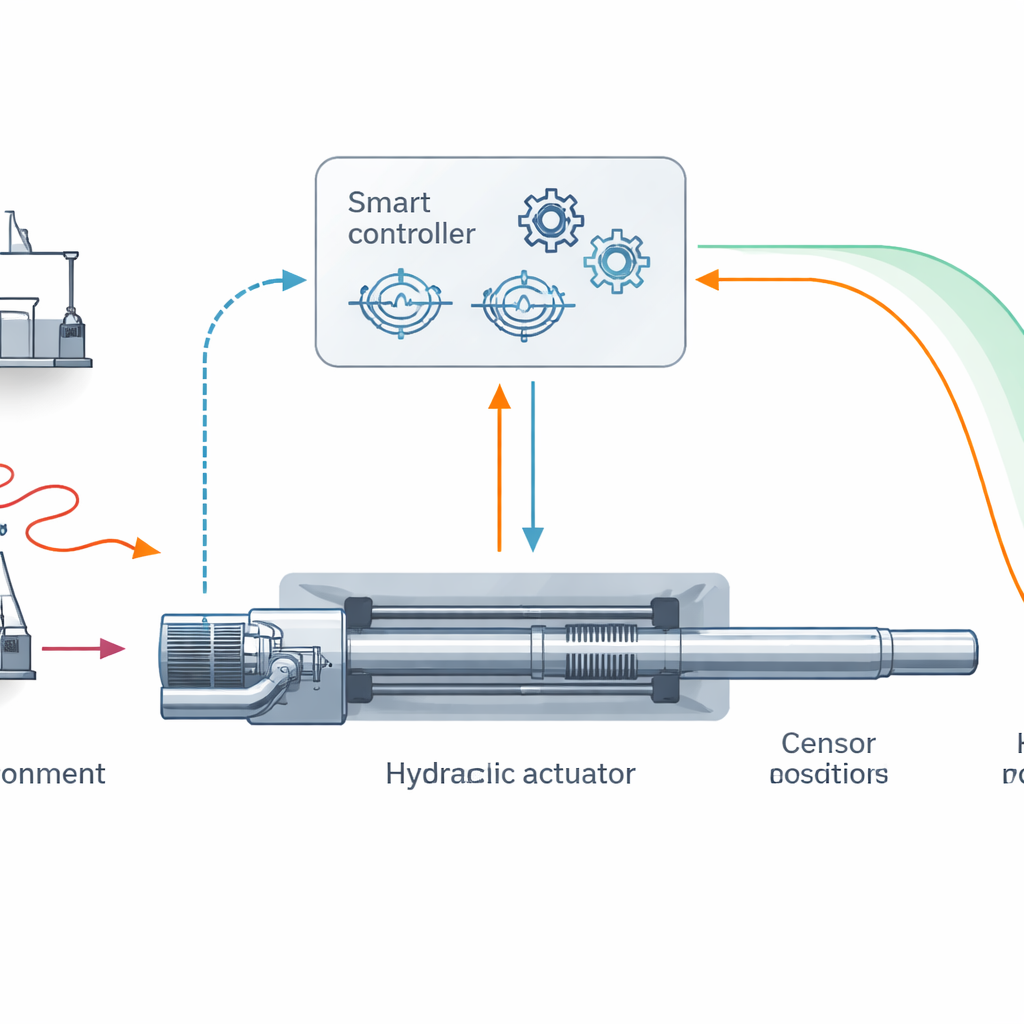
Los actuadores electro-hidrostáticos combinan una válvula servoelectrónica, fluido hidráulico y un pistón para crear sistemas de movimiento compactos y potentes. Son atractivos para industrias que demandan respuesta rápida y alta fiabilidad. Sin embargo, su comportamiento es altamente no lineal: el aceite se comprime, hay fugas y calentamiento; las cargas externas varían; y solo algunas magnitudes —típicamente la posición— son fáciles de medir. Muchos métodos de control existentes usan múltiples sensores y modelos complejos, lo que eleva el coste y aun así no puede garantizar que el actuador llegue a la posición objetivo en un tiempo determinado cuando aparecen perturbaciones.
Una estrategia de control más inteligente con menos sensores
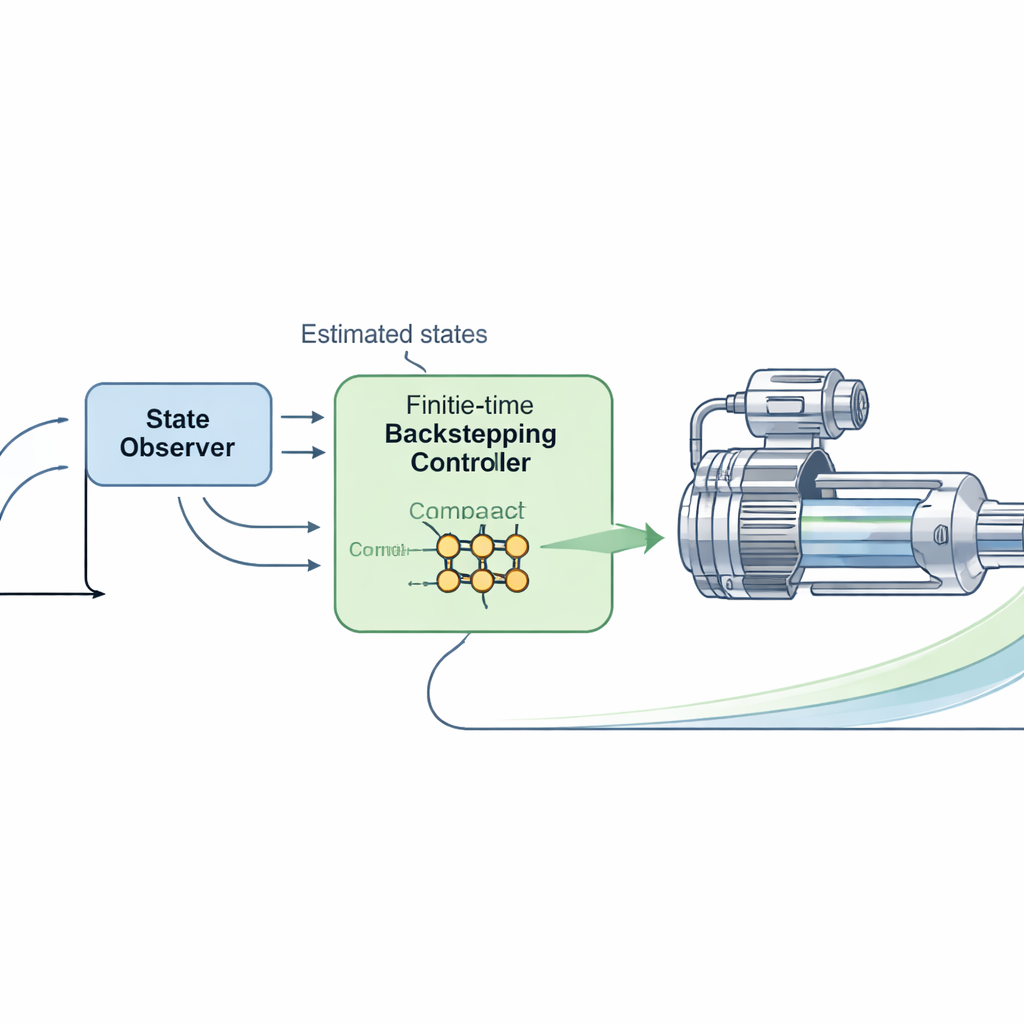
Los autores proponen una estrategia de control que busca hacer más con menos hardware. En lugar de medir varias variables internas, asumen que solo está disponible la posición del pistón. Un observador de estados, una especie de gemelo matemático del sistema real, reconstruye los estados internos ocultos a partir de esta única medida. Sobre esto, diseñan un controlador por backstepping de "tiempo finito". A diferencia de los esquemas convencionales que solo prometen que el error se reducirá de forma gradual, el control en tiempo finito está construido para que el error de seguimiento caiga dentro de una banda pequeña alrededor de cero en un tiempo calculable, incluso cuando el sistema sufre perturbaciones.
Uso de redes neuronales sin gran carga computacional
Debido a que muchos detalles de la dinámica hidráulica son inciertos o cambian con el tiempo, el controlador debe adaptarse en tiempo real. El equipo utiliza una red neuronal de funciones de base radial para aproximar esos efectos desconocidos, pero evitan la habitual carga computacional centrándose en una única magnitud: la norma máxima de los vectores de pesos de la red. Esta ley de adaptación basada en la "norma máxima" reduce el número de parámetros que deben ajustarse en tiempo real a la vez que conserva la capacidad de la red para capturar comportamientos complejos. Como resultado, el controlador resulta más fácil de implementar en hardware práctico manteniendo la capacidad de manejar no linealidades y perturbaciones de manera eficaz.
Prueba en papel, luego en simulación y hardware
Matemáticamente, los autores analizan el observador y el controlador combinados usando la teoría de Lyapunov, una herramienta estándar para estudiar la estabilidad. Demuestran que los errores de estimación del observador, el error de seguimiento de la posición y el error de adaptación de la red neuronal convergen todos a pequeñas vecindades alrededor de cero en tiempo finito, incluso en presencia de perturbaciones acotadas. A continuación prueban su diseño en simulaciones por ordenador, donde el actuador sigue una consigna de posición senoidal bajo perturbaciones fuertes y variantes en el tiempo. En comparación con otros dos métodos avanzados —un controlador por backstepping con red neuronal y un controlador PID asistido por red neuronal—, el nuevo enfoque logra la menor desviación estándar, error medio y error máximo.
Pruebas en el mundo real con movimientos exigentes
Los investigadores van un paso más allá implementando su controlador en un banco de pruebas electro-hidrostático de laboratorio que usa únicamente un sensor de posición. Ejecutan dos escenarios desafiantes: un movimiento en rampa de aumento constante y un movimiento senoidal de cambio rápido. En ambos casos, el observador reconstruye con éxito los estados internos a partir de la única señal de posición, lo que permite al controlador reaccionar con rapidez. El método propuesto ofrece de forma consistente un seguimiento más preciso que los controladores de comparación, con menores errores medios y picos. Esta mejora en la precisión tiene un coste: la señal de control es más energética y muestra acción en frecuencias altas apreciables, reflejando las fuertes correcciones usadas para rechazar perturbaciones.
Qué significa esto para las máquinas del futuro
En términos sencillos, este trabajo muestra que los sistemas hidráulicos de gran esfuerzo pueden controlarse con mayor precisión y rapidez, usando menos sensores y sin un modelo matemático perfecto. Al combinar una estructura de control de rápida convergencia, una regla de adaptación de red neuronal esbelta y un observador de estados, los autores demuestran tanto en teoría como en experimentos que un actuador electro-hidrostático puede seguir consignas de movimiento exigentes con errores menores que los métodos competidores. Tales avances podrían traducirse en robots industriales más precisos, sistemas de actuación aeronáutica más seguros y maquinaria de construcción más eficiente. Investigaciones futuras apuntarán a refinar el ajuste de las ganancias del controlador y a reducir el chatter, acercando estos beneficios a su despliegue en productos del mundo real.
Cita: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
Palabras clave: actuador electro-hidrostático, control de movimiento hidráulico, control adaptativo, estabilidad en tiempo finito, observador con red neuronal