Clear Sky Science · tr
Uyarlanabilir sonlu-zamanda geri-adiım ve durum gözlemi ile elektro-hidrostatik aktüatörlerin konum izleme kontrolü
Ağır Makineleri Düzgün Hareket Ettirmenin Yolları
Günümüz makineleri—uçaklardan gemilere, inşaat ekipmanlarına kadar—genellikle milimetre düzeyinde hassasiyetle ağır parçaları hareket ettirmek için güçlü hidrolik aktüatörlere dayanır. Ancak gerçek dünya koşulları karmaşıktır: yükler aniden değişir, sensörler sınırlıdır ve sürtünme ile akışkan etkileri hareketi hedefin dışına çıkarabilir. Bu makale, simetrik silindire sahip elektro-hidrostatik bir aktüatör türünü, zorluklara rağmen istenen konuma hızlı ve doğru şekilde ulaştıracak yeni bir kontrol yaklaşımı sunar.
Hidrolik Hareketi Kontrol Etmenin Zorluğu
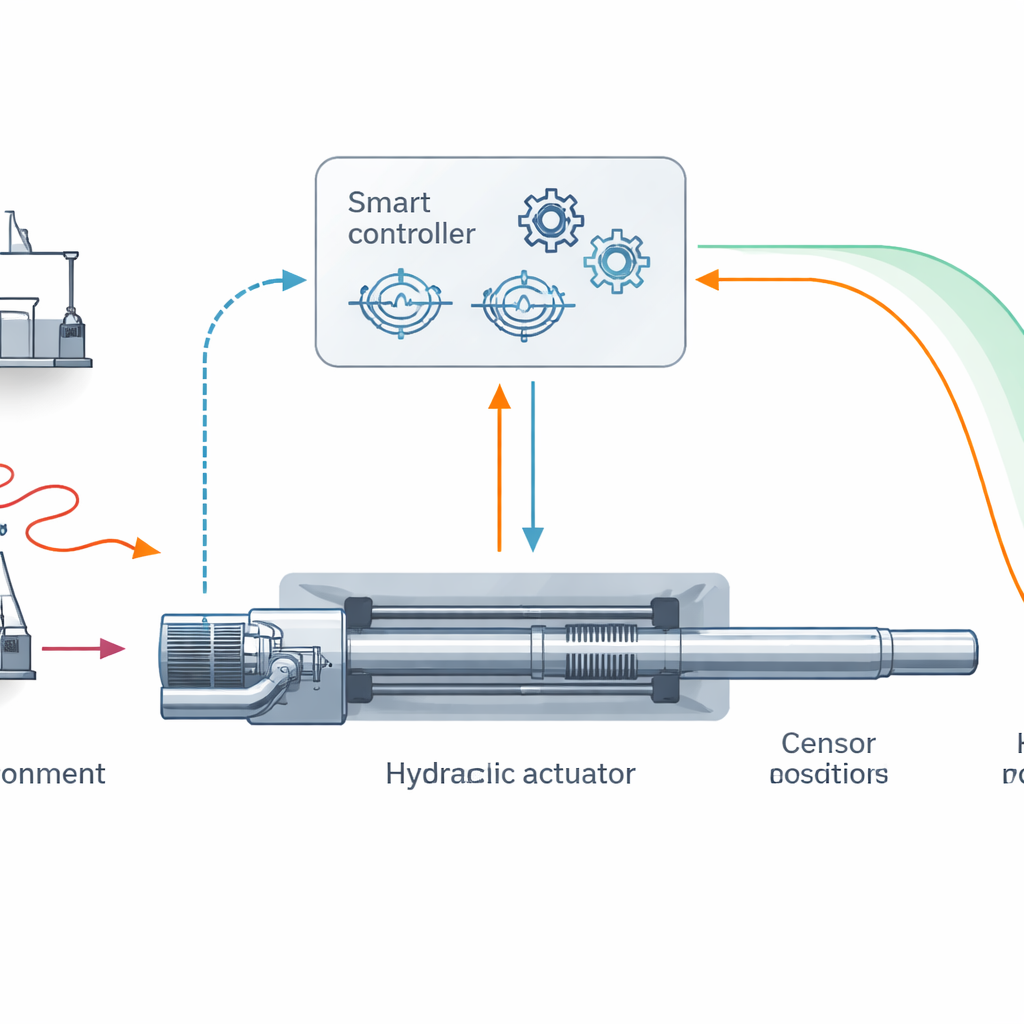
Elektro-hidrostatik aktüatörler bir elektrik servo valfi, hidrolik sıvı ve bir pistonu birleştirerek güçlü, kompakt hareket sistemleri oluşturur. Hızlı tepki ve yüksek güvenilirlik gerektiren endüstriler için cazip bir seçenektirler. Ancak davranışları son derece doğrusal olmayan özellikler gösterir: yağ sıkışır, sızar ve ısınır; dış yükler değişir; ve genellikle sadece konum kolayca ölçülebilir. Mevcut birçok kontrol yöntemi birden fazla sensör ve karmaşık modeller kullanır; bu da maliyeti artırır ve bozulmalar olduğunda aktüatörün belirli bir süre içinde hedef konuma ulaşacağını garanti edemez.
Daha Az Sensörle Daha Akıllı Bir Kontrol Stratejisi
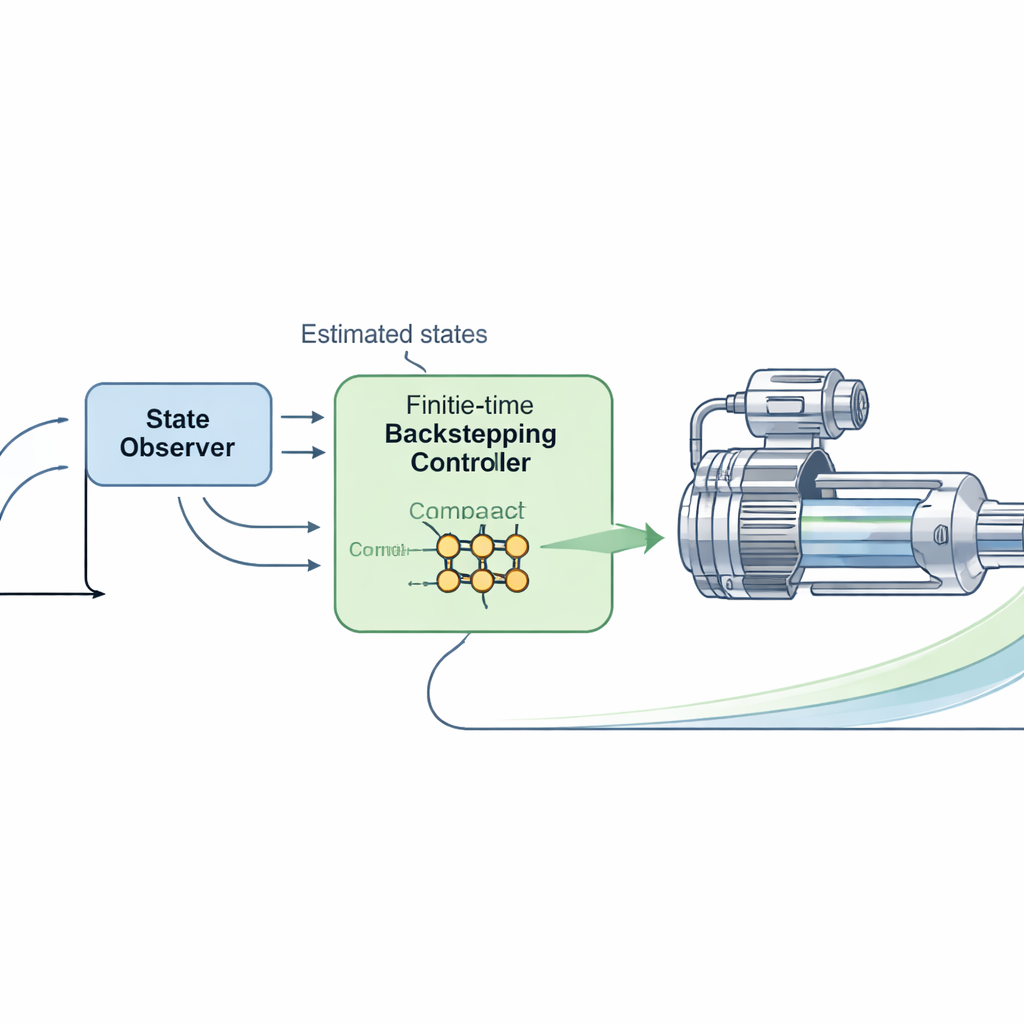
Yazarlar, daha az donanımla daha fazlasını başarmayı hedefleyen bir kontrol stratejisi öneriyor. Birden çok iç değişkeni ölçmek yerine yalnızca piston konumunun mevcut olduğunu varsayıyorlar. Bir durum gözlemcisi—gerçek sistemin matematiksel bir ikizi—bu tek ölçümden gizli iç durumları yeniden oluşturur. Bunun üzerine, bir "sonlu-zaman" geri-adiım denetleyicisi tasarlıyorlar. Hataların kademeli olarak küçüleceğini vaat eden geleneksel şemalardan farklı olarak, sonlu-zaman kontrolü, sistem bozulmalar altında sallansa bile takip hatasının hesaplanabilir bir süre içinde sıfır etrafında küçük bir bant içine düşmesini garanti edecek şekilde inşa edilmiştir.
Ağır Hesaplama Gerektirmeden Sinir Ağları Kullanmak
Hidrolik dinamiğin pek çok detayı belirsiz veya zamanla değiştiği için denetleyicinin ortamda çevikçe uyum sağlaması gerekir. Ekip, bu bilinmeyen etkileri yaklaşıklamak için radyal bazlı fonksiyon sinir ağı kullanıyor, ancak olağan hesaplama yükünden kaçınmak için tek bir niceliğe odaklanıyor: ağ ağırlık vektörlerinin maksimum normu. Bu "maksimum norm" uyarlama yasası, gerçek zamanlı ayarlanması gereken parametre sayısını azaltırken sinir ağının karmaşık davranışları yakalama yeteneğini koruyor. Sonuç olarak, denetleyici pratik donanım üzerinde uygulaması daha kolay hale geliyor ve yine de doğrusal olmayanlıklar ile bozulmaları etkin biçimde ele alıyor.
Teoride İspat, Sonra Simülasyon ve Donanımda Deney
Matematiksel olarak, yazarlar gözlemci–denetleyici bileşimini kararlılığı incelemek için standart bir araç olan Lyapunov teorisi ile analiz ediyor. Gözlemcinin tahmin hatalarının, konum takip hatasının ve sinir ağı uyarlama hatasının sınırlı bozulmalar altında bile sonlu zamanda sıfırın etrafında küçük komşuluklara yakınsadığını gösteriyorlar. Ardından tasarımlarını bilgisayar simülasyonlarında test ediyorlar; burada aktüatör, güçlü ve zamanla değişen bozulmalar altında sinüzoidal bir konum komutunu takip ediyor. İki diğer gelişmiş yöntemle—sinir ağlı geri-adiım denetleyicisi ve sinir ağ destekli PID denetleyicisi—kıyaslandığında, yeni yaklaşım en küçük standart sapma, ortalama hata ve maksimum hatayı elde ediyor.
Zorlu Hareketlerle Gerçek Dünya Testleri
Araştırmacılar bir adım daha ilerleyerek denetleyicilerini yalnızca bir konum sensörü kullanan laboratuvar elektro-hidrostatik test düzeneğinde uyguluyorlar. İki zorlu senaryo çalıştırıyorlar: sürekli artan bir rampa hareketi ve hızlı değişen sinüzoidal bir hareket. Her iki durumda da gözlemci, tek konum sinyalinden iç durumları başarıyla yeniden oluşturuyor ve denetleyicinin hızlı tepki vermesini sağlıyor. Önerilen yöntem karşılaştırma denetleyicilerine göre tutarlı biçimde daha sıkı takip sağlıyor; ortalama ve tepe hataları daha düşük. Bu iyileşmiş doğruluk bir bedelle geliyor: kontrol sinyali daha enerjik ve fark edilir yüksek frekanslı hareket gösteriyor; bu, bozulmaları reddetmek için kullanılan güçlü düzeltmeleri yansıtıyor.
Gelecek Makineler İçin Anlamı
Basitçe söylemek gerekirse, bu çalışma ağır hizmet hidrolik tahriklerin daha az sensör ve kusursuz bir matematiksel model olmadan daha hızlı ve daha hassas kontrol edilebileceğini gösteriyor. Hızlı yakınsayan bir kontrol yapısı, sade bir sinir ağı uyarlama kuralı ve bir durum gözlemcisinin birleşimiyle yazarlar, kağıt üzerinde ve deneylerde elektro-hidrostatik aktüatörün zorlu hareket komutlarını rakip yöntemlere göre daha küçük hatalarla takip edebildiğini gösteriyor. Bu tür ilerlemeler daha hassas endüstriyel robotlara, daha güvenli uçak hareket sistemlerine ve daha verimli inşaat makinelerine dönüşebilir. Gelecek çalışmalar denetleyici kazançlarının ayarını iyileştirmeyi ve titreşimi azaltmayı hedefleyerek bu faydaları gerçek dünya ürünlerine daha yakın hale getirmeyi amaçlayacaktır.
Atıf: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
Anahtar kelimeler: elektro-hidrostatik aktüatör, hidrolik hareket kontrolü, uyarlanabilir kontrol, sonlu-zaman kararlılığı, sinir ağı gözlemcisi