Clear Sky Science · ja
適応有限時間バックステッピングと状態観測による電気油圧作動機の位置追従制御
大型機械の滑らかな動作を維持する
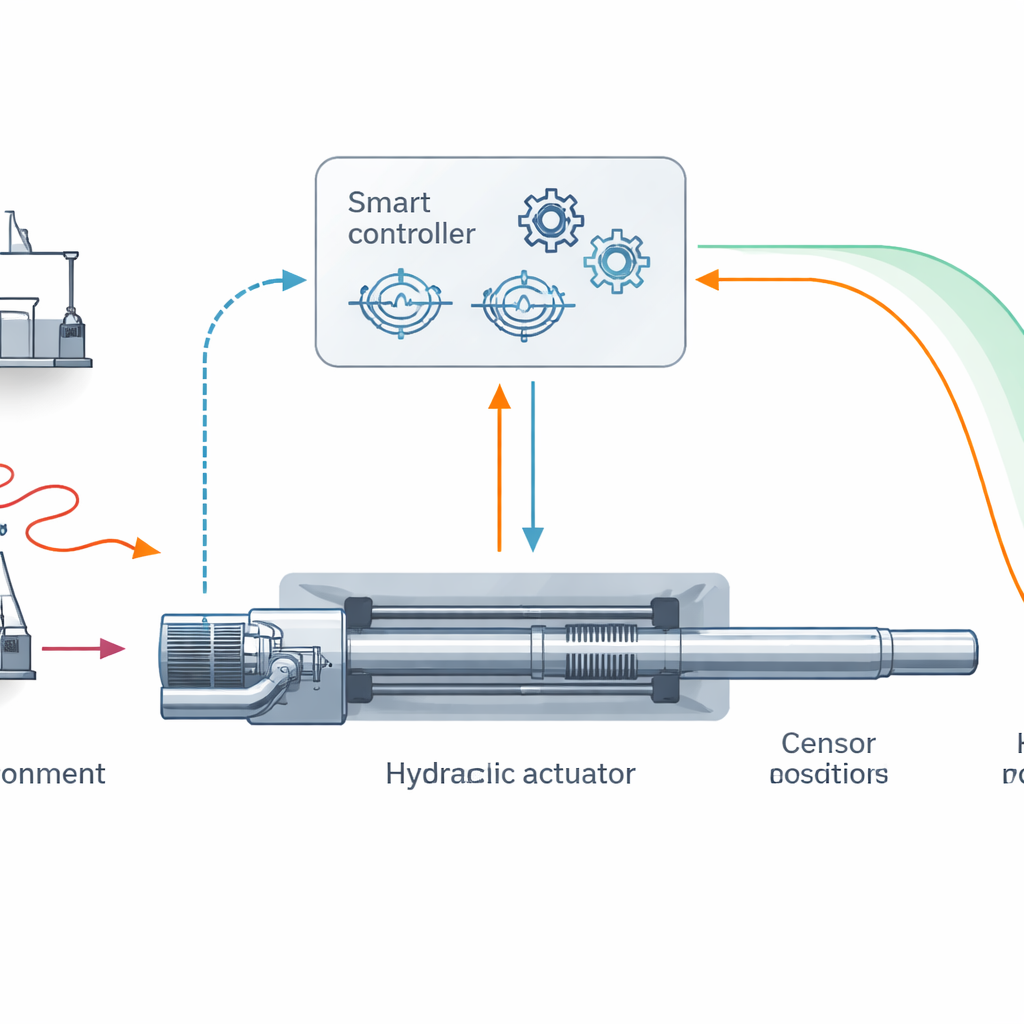
現代の機械は、航空機や船舶から建設機械に至るまで、ミリメートル単位の精度で重い部品を動かすために強力な油圧アクチュエータに依存することが多い。しかし現実の条件は厄介で、荷重が急変したり、センサーが限られていたり、摩擦や流体現象が運動を乱す要因となる。本論文は、対称シリンダを持つ電気油圧アクチュエータという特定の油圧駆動を、そうした挑戦的な状況下でも迅速かつ精確に目標位置へ到達させる新しい制御手法を提示する。
油圧運動制御が難しい理由
電気油圧アクチュエータは、電動サーボバルブ、油圧流体、ピストンを組み合わせて強力でコンパクトな駆動を実現する。高速応答と高信頼性を要求する産業で魅力的だ。しかしその挙動は高度に非線形である:油は圧縮し、漏れや発熱が生じる;外部負荷は変動する;測定可能なのは通常位置など一部の量に限られる。既存の多くの制御法は複数のセンサーや複雑なモデルを必要とし、コストを押し上げるうえに、摂動が生じた際に有限の時間内に目標位置へ到達することを保証できないことが多い。
少ないセンサで賢く制御する戦略
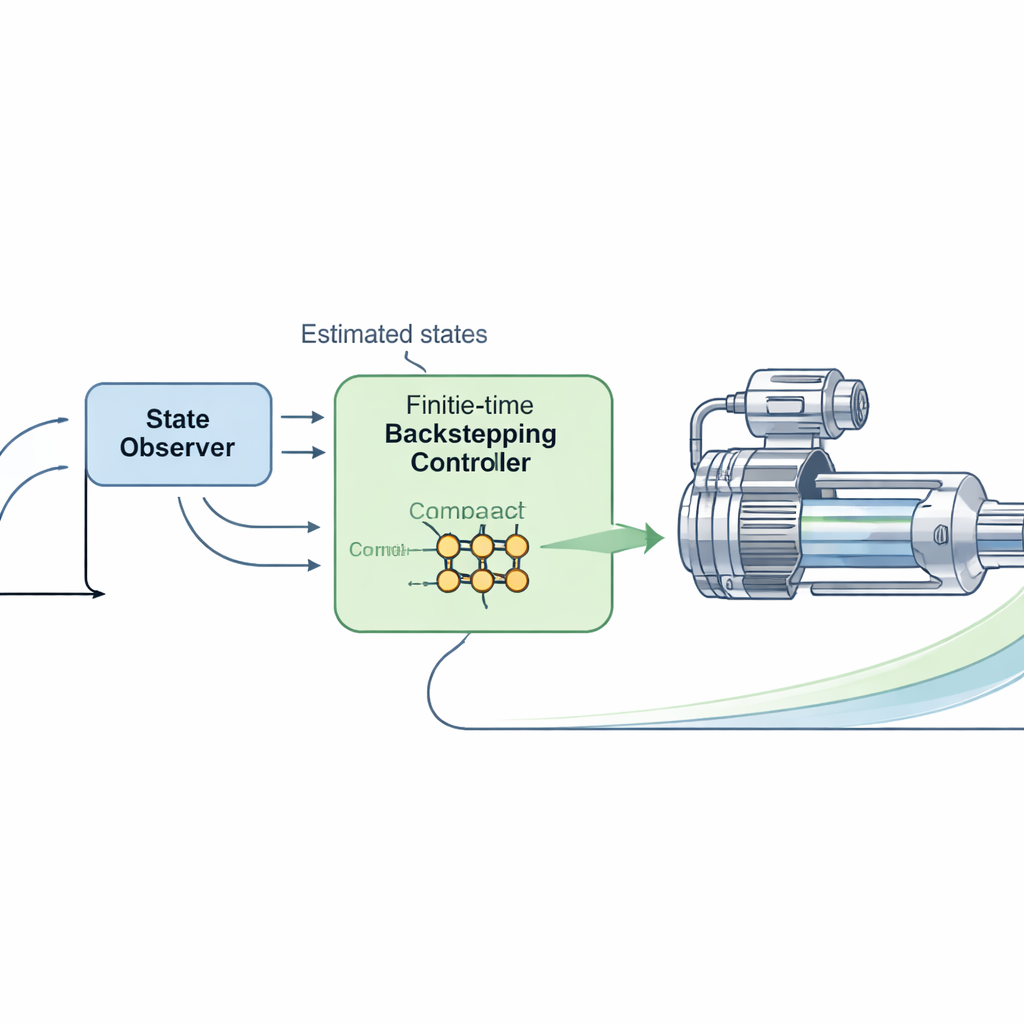
著者らが提案する制御戦略は、ハードウェアを減らしてより多くを実現することを狙っている。内部の複数変数を測定する代わりに、ピストン位置のみが利用可能であると仮定する。状態観測器は実システムの数学的な双子として、この単一の測定から隠れた内部状態を再構築する。さらにその上に「有限時間」バックステッピング制御器を設計している。誤差が徐々に減少することを約束する従来の方式と異なり、有限時間制御は追従誤差が摂動下でも計算可能な時間内にゼロ近傍の小さな帯域へ収まることを保証するよう構成されている。
重い計算を避けたニューラルネットワークの利用
油圧ダイナミクスの多くの詳細は不確かで時間とともに変化するため、制御器はオンラインで適応する必要がある。研究チームは未知の影響を近似するために放射基底関数(RBF)ニューラルネットワークを用いるが、通常の計算負荷を避けるためにネットワーク重みベクトルの最大ノルムという単一の量に着目する。こうした「最大ノルム」適応則は、リアルタイムで調整すべきパラメータ数を削減しつつ、ニューラルネットワークが複雑な挙動を捉える能力を保持する。結果として、非線形性や摂動に対処しながら、実機で実装しやすい制御器となっている。
理論的証明、次にシミュレーションと実機検証
数学的には著者らはリヤプノフ理論を用いて観測器と制御器の結合系を解析している。観測器の推定誤差、位置追従誤差、ニューラルネットワーク適応誤差はいずれも有界な摂動下で有限時間にゼロの小さな近傍へ収束することを示す。つづいてコンピュータシミュレーションで設計を検証し、アクチュエータが強く時間変化する摂動下で正弦波位置指令に従う状況を評価した。ニューラルネットワーク・バックステッピング制御器やニューラルネットワーク補助PID制御器と比較して、本手法は標準偏差、平均誤差、最大誤差のいずれにおいても最小を達成した。
要求の厳しい動作での実機試験
研究者らはさらに一歩進んで、位置センサのみを用いる実験用電気油圧ベンチで制御器を実装した。持続的に増加するランプ運動と高速で変化する正弦運動という2つの厳しいシナリオを実行した。いずれの場合も観測器は単一の位置信号から内部状態を再構築し、制御器は迅速に反応できた。提案手法は比較制御器より一貫して追従精度が高く、平均およびピーク誤差が小さかった。改善された精度には代償もあり、制御信号はよりエネルギッシュで高周波成分が目立ち、強い補正による摂動抑制の痕跡を示した。
将来の機械にとっての意義
要するに、本研究は重負荷用油圧駆動をより少ないセンサで、完全な数理モデルなしに、より精確かつ迅速に制御できることを示している。高速収束する制御構造、簡素なニューラルネットワーク適応則、そして状態観測器を組み合わせることで、著者らは理論的解析と実験の両面で、電気油圧アクチュエータが競合同類よりも小さな誤差で厳しい運動指令に従えることを示した。こうした進展は、より精密な産業用ロボット、安全性の高い航空機作動系、効率的な建設機械への応用につながり得る。今後の研究課題は制御ゲインの調整精度の向上とチャタリングの抑制に取り組み、これらの利点を実用製品への移行に近づけることである。
引用: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
キーワード: 電気油圧アクチュエータ, 油圧モーション制御, 適応制御, 有限時間安定性, ニューラルネットワーク観測器