Clear Sky Science · nl
Positievolgingsregeling van elektro-hydrostatische actuator via adaptieve eind-tijd backstepping en statusobservatie
Zware machines soepel in beweging houden
Moderne machines — van vliegtuigen en schepen tot bouwmaterieel — vertrouwen vaak op krachtige hydraulische actuatoren om zware onderdelen met millimeternauwkeurigheid te verplaatsen. De praktijk is echter rommelig: lasten veranderen plotseling, sensoren zijn beperkt en wrijving en vloeistofeffecten kunnen de beweging uit koers brengen. Dit artikel presenteert een nieuwe manier om een specifiek type hydraulische aandrijving, een elektro-hydrostatische actuator met een symmetrische cilinder, te regelen, zodat deze snel en nauwkeurig de gewenste positie bereikt, zelfs onder dergelijke uitdagende omstandigheden.
Waarom het regelen van hydraulische beweging lastig is
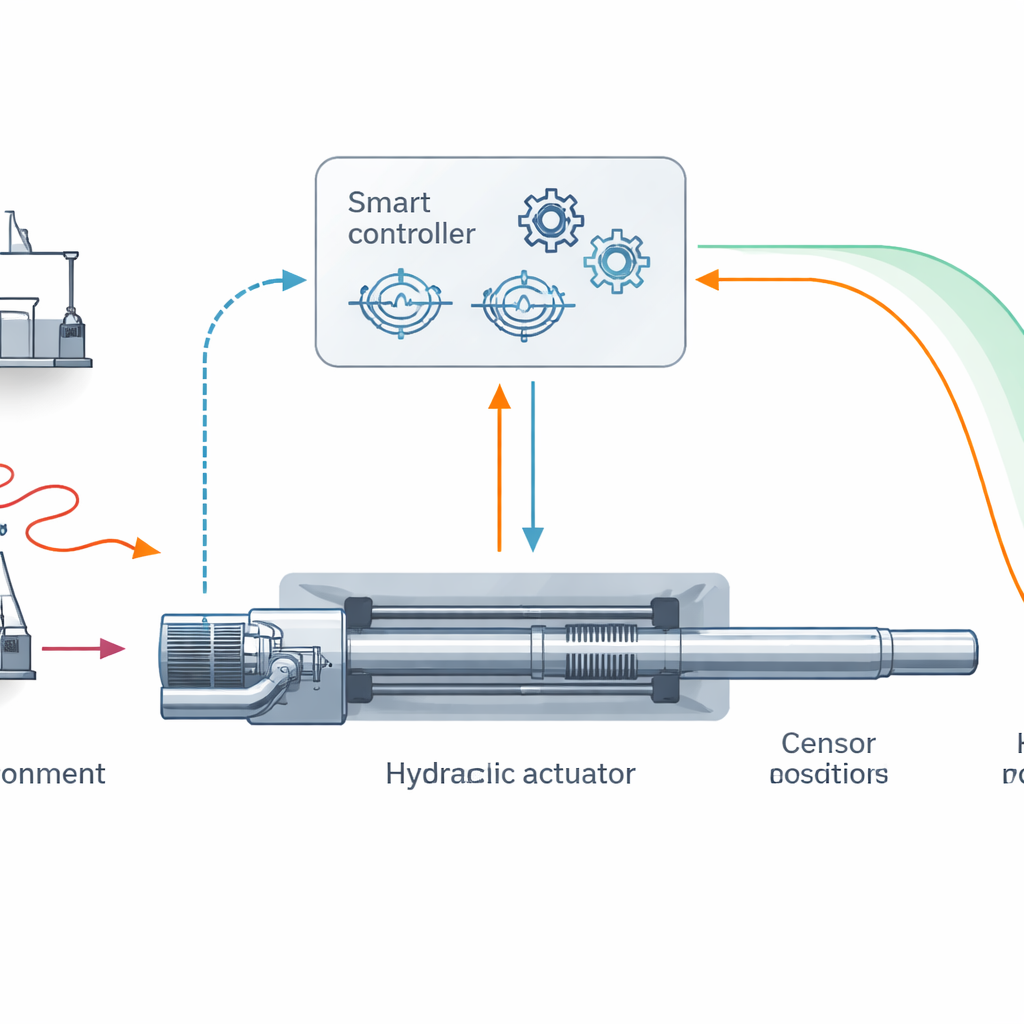
Elektro-hydrostatische actuatoren combineren een elektrische servoklep, hydraulische vloeistof en een zuiger om sterke, compacte bewegingssystemen te creëren. Ze zijn aantrekkelijk voor sectoren die snelle respons en hoge betrouwbaarheid vereisen. Hun gedrag is echter sterk niet-lineair: de olie comprimeert, er treedt lek op en warmteontwikkeling; externe belastingen variëren; en slechts enkele grootheden — doorgaans de positie — zijn eenvoudig te meten. Veel bestaande regelmethoden gebruiken meerdere sensoren en complexe modellen, wat de kosten verhoogt en toch niet kan garanderen dat de actuator de doelpositie binnen een bepaald tijdsbestek bereikt wanneer verstoringen optreden.
Een slimmere regelstrategie met minder sensoren
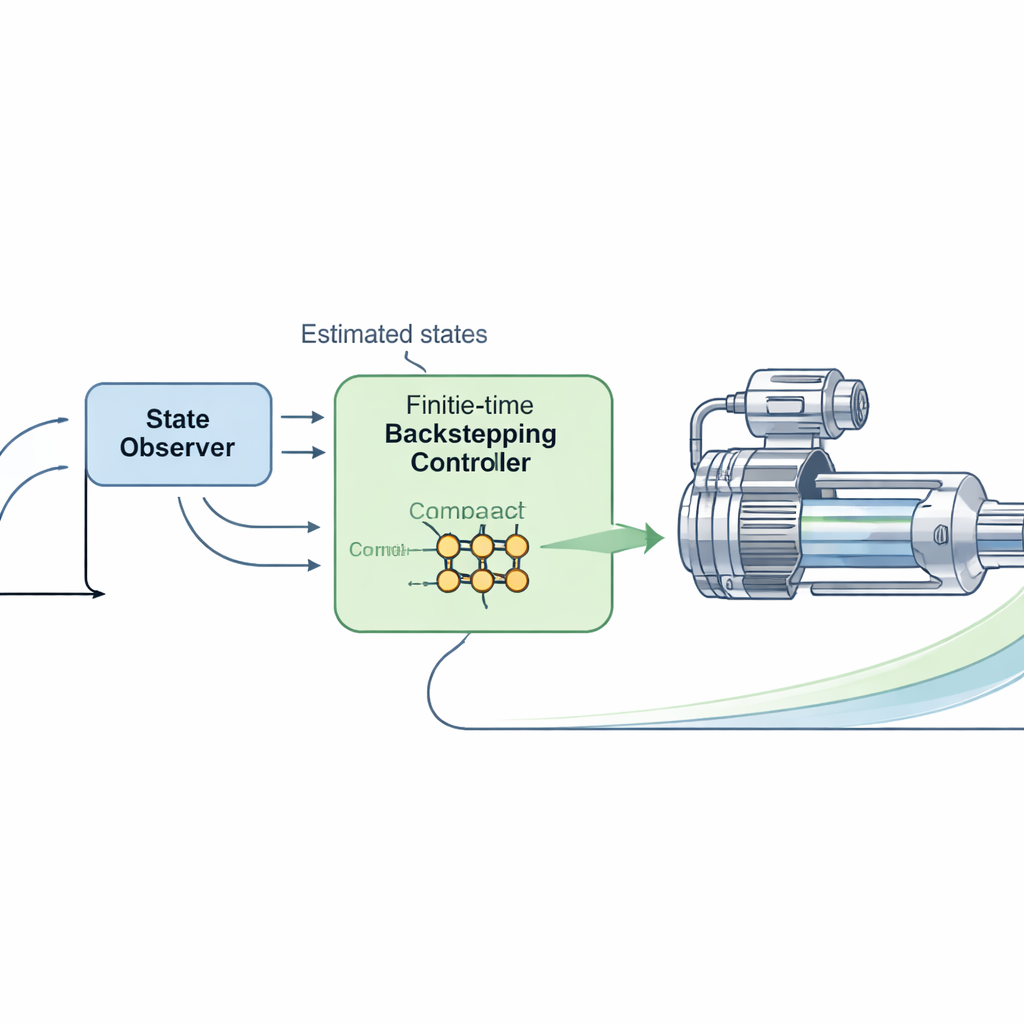
De auteurs stellen een regelstrategie voor die meer wil bereiken met minder hardware. In plaats van meerdere interne variabelen te meten, veronderstellen ze dat alleen de zuigerpositie beschikbaar is. Een statusobserver, een soort wiskundige tweeling van het echte systeem, reconstrueert de verborgen interne toestanden uit deze enkele meting. Daarbovenop ontwerpen ze een eind-tijd backstepping-regelaar. In tegenstelling tot conventionele schema’s die alleen beloven dat de fout geleidelijk zal afnemen, is eind-tijdregeling zodanig opgebouwd dat de volgfout gegarandeerd binnen een berekenbare tijd in een kleine band rond nul valt, zelfs wanneer het systeem door verstoringen wordt geschud.
Neurale netwerken gebruiken zonder zware berekening
Aangezien veel details van de hydraulische dynamica onzeker zijn of in de loop van de tijd veranderen, moet de regelaar zich adaptief aanpassen. Het team gebruikt een radiale-basisfunctie-neuraal netwerk om deze onbekende effecten te benaderen, maar ze vermijden de gebruikelijke rekenlast door zich te concentreren op één grootheid: de max-norm van de gewichtsvectoren van het netwerk. Deze adaptiewet op basis van de max-norm vermindert het aantal parameters dat in realtime moet worden aangepast, terwijl het vermogen van het neurale netwerk om complex gedrag vast te leggen behouden blijft. Als gevolg daarvan wordt de regelaar eenvoudiger te implementeren op praktische hardware en kan hij nog steeds effectief niet-lineariteiten en verstoringen afhandelen.
Bewijs op papier, daarna in simulatie en hardware
Wiskundig analyseren de auteurs de gecombineerde observer–regelaar met behulp van Lyapunov-theorie, een standaardinstrument voor het bestuderen van stabiliteit. Ze tonen aan dat de schattingsfouten van de observer, de positievolgfout en de adaptatiefout van het neurale netwerk allemaal binnen een eindige tijd convergeren naar kleine omgevingen rond nul, zelfs in aanwezigheid van begrensde verstoringen. Vervolgens testen ze hun ontwerp in computersimulaties, waarin de actuator een sinusoïdale positieopdracht volgt onder sterke, tijdsvariërende verstoringen. Vergeleken met twee andere geavanceerde methoden — een neurale-netwerk backstepping-regelaar en een door neurale netwerken ondersteunde PID-regelaar — behaalt de nieuwe aanpak de kleinste standaarddeviatie, gemiddelde fout en maximale fout.
Tests in de echte wereld met veeleisende bewegingen
De onderzoekers gaan een stap verder door hun regelaar te implementeren op een laboratorium elektro-hydrostatische testbank die alleen een positietransducer gebruikt. Ze voeren twee uitdagende scenario’s uit: een gelijkmatig toenemende rampbeweging en een snel veranderende sinusoïdale beweging. In beide gevallen reconstrueert de observer succesvol de interne toestanden uit het enkele positieteken, waardoor de regelaar snel kan reageren. De voorgestelde methode levert consequent strakkere volgprestaties dan de vergelijkingsregelaars, met lagere gemiddelde en piekfouten. Deze verbeterde nauwkeurigheid heeft wel een prijs: het regelsignaal is energieker en vertoont merkbare hoogfrequente actie, wat de sterke correcties weerspiegelt die worden gebruikt om verstoringen te onderdrukken.
Wat dit betekent voor toekomstige machines
Kort gezegd laat dit werk zien dat zwaardere hydraulische aandrijvingen nauwkeuriger en sneller geregeld kunnen worden, met minder sensoren en zonder een perfect wiskundig model. Door een snel-convergerende regelstructuur, een slanke adaptieregel voor het neurale netwerk en een statusobserver te combineren, tonen de auteurs op papier en in experimenten aan dat een elektro-hydrostatische actuator veeleisende bewegingsopdrachten met kleinere fouten kan volgen dan concurrerende methoden. Zulke vorderingen kunnen zich vertalen naar nauwkeurigere industriële robots, veiligere vliegtuigactuatiesystemen en efficiënter bouwmaterieel. Toekomstig onderzoek zal zich richten op het verfijnen van de afstemming van regelversterkingen en het verminderen van chattering, om deze voordelen dichter bij inzet in echte producten te brengen.
Bronvermelding: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
Trefwoorden: elektro-hydrostatische actuator, hydraulische bewegingsregeling, adaptieve regeling, eindtijdstabiliteit, neurale-netwerkobserver