Clear Sky Science · he
בקרה על מעקב מיקום של אקטואטורים אלקטרו-הידראו-סטטיים באמצעות backstepping הסתגלי בזמן סופי ותצפית מצב
שמירה על תנועה חלקה של מכונות כבדות
מכונות מודרניות — ממטוסים ואוניות ועד ציוד בנייה — מסתמכות לעתים קרובות על אקטואטורים הידראוליים עוצמתיים להזיז חלקים כבדים בדיוק ברמת המילימטר. אך תנאי העולם האמיתי מבולגנים: העומסים משתנים בפתאומיות, החיישנים מוגבלים, וחיכוך וגורמי נוזל עלולים להסיט את התנועה מהמטרה. מאמר זה מציג שיטה חדשה לשלוט בסוג מסוים של הנעה הידראולית, הנקרא אקטואטור אלקטרו-הידראו-סטטי עם בוכנה סימטרית, כך שהוא יגיע למיקום המבוקש במהירות ובדיוק גם בתנאים מאתגרים אלה.
מדוע קשה לשלוט בתנועה הידראולית
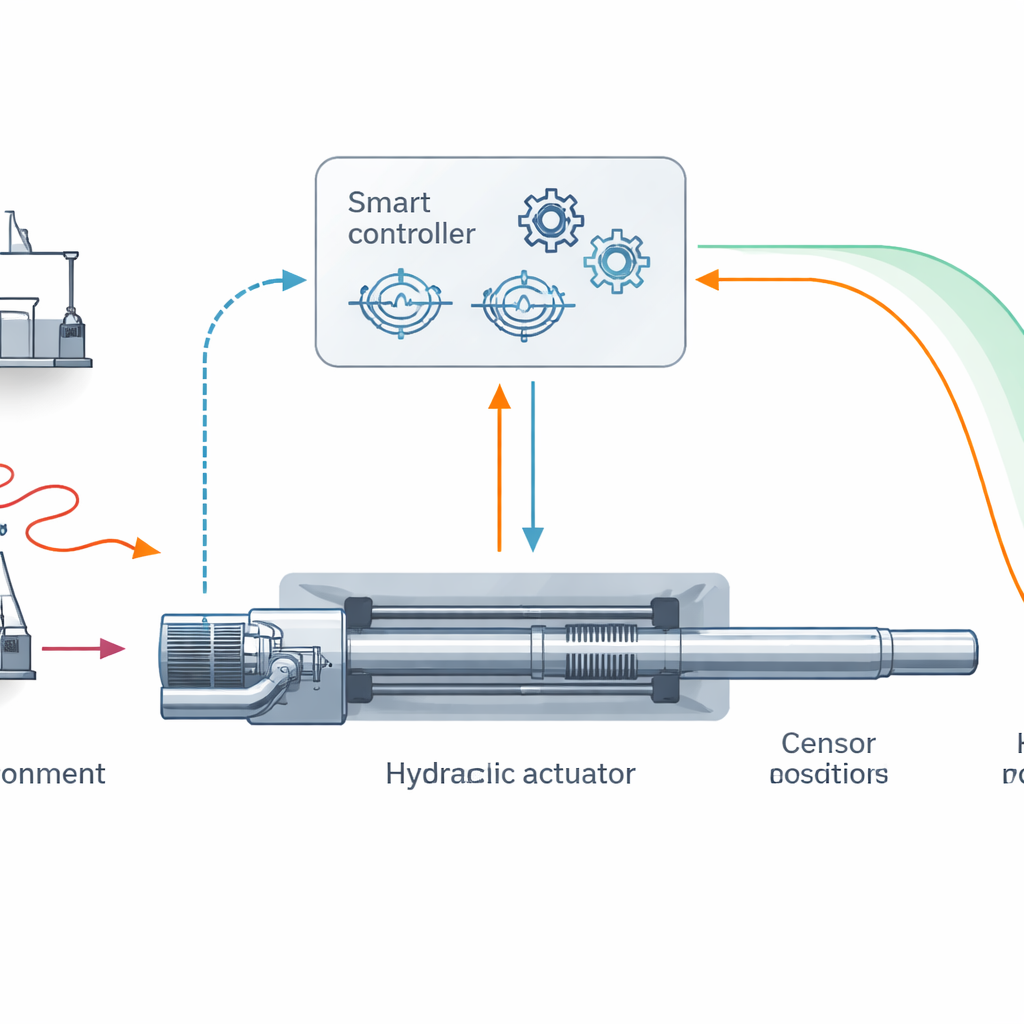
אקטואטורים אלקטרו-הידראו-סטטיים משלבים שסתום סרוו חשמלי, נוזל הידראולי ובוכנה כדי ליצור מערכות תנועה חזקות ודחוסות. הם אטרקטיביים לתעשיות שדורשות תגובה מהירה ואמינות גבוהה. עם זאת, התנהגותם היא מאוד לא ליניארית: השמן נדחס, יש דליפות וחימום; העומסים החיצוניים משתנים; ורק כמות מוגבלת של משתנים — בדרך כלל המיקום — ניתנים למדידה בקלות. שיטות בקרה רבות קיימות משתמשות במספר חיישנים ובמודלים מורכבים, מה שמייקר את המערכת ועדיין אינו מבטיח שהאקטואטור יגיע למיקום היעד בתוך זמן מוגדר כאשר מופיעות הפרעות.
אסטרטגיית בקרה חכמה יותר עם פחות חיישנים
המחברים מציעים אסטרטגיית בקרה שמטרתה לעשות יותר עם פחות חומרה. במקום למדוד מספר משתנים פנימיים, הם מניחים שרק מיקום הבוכנה זמין. תצפיתן מצב, מעין תאום מתמטי של המערכת האמיתית, משחזר את המצבים הפנימיים הנסתרים מהמדידה היחידה הזו. בנוסף לכך הם מעצבים בורר backstepping בזמן סופי. שלא כמו סכמות קונבנציונליות שמבטיחות רק שהשגיאה תצטמצם בהדרגה, בקרה בזמן סופי בנויה כך שהשגיאת המעקב מובטחת לרדת לרצועה קטנה סביב האפס בתוך זמן שניתן לחשבו, גם כאשר המערכת מוטרדת.
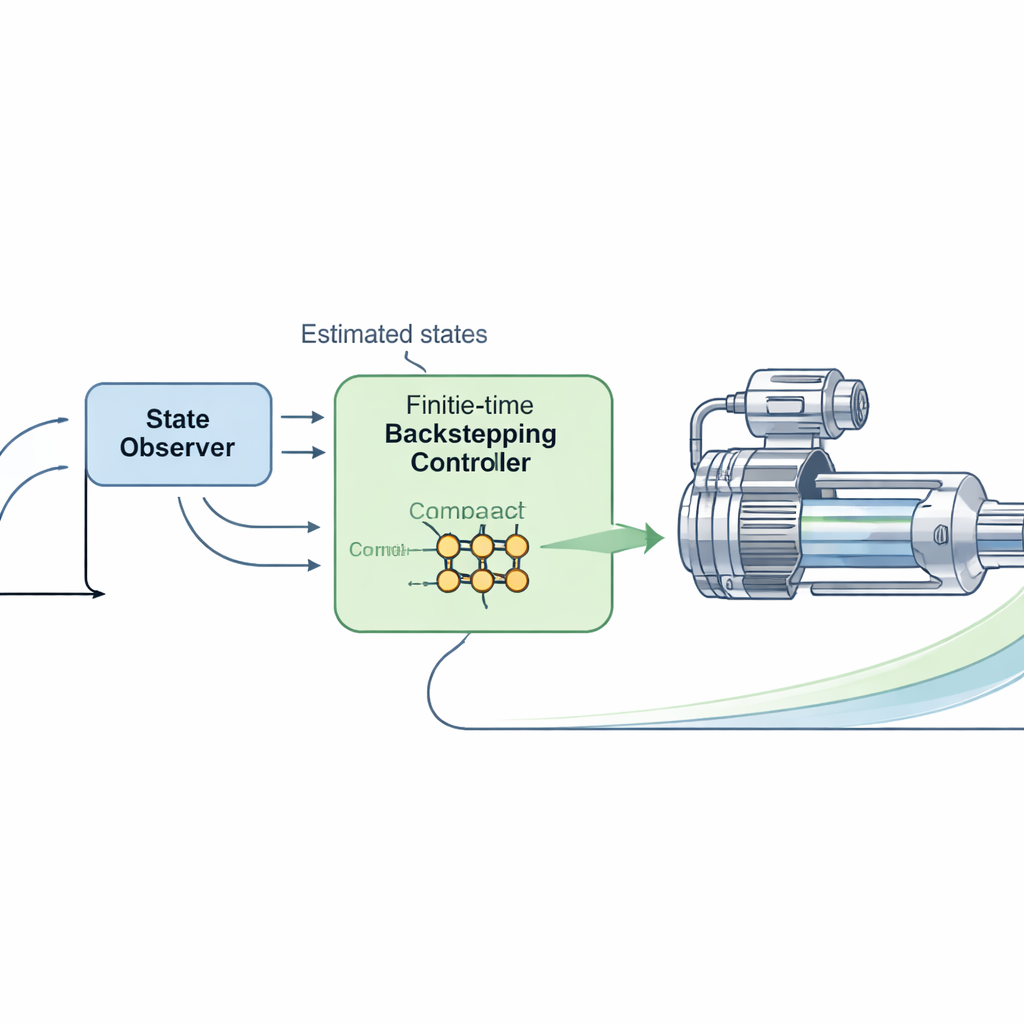
שימוש ברשתות עצביות בלי עומס חישובי כבד
מכיוון שרבים מהפרטים בדינמיקת ההידראוליקה אינם ודאיים או משתנים עם הזמן, הבקר חייב להסתגל בזמן אמת. הצוות משתמש ברשת עצבית פונקציית בסיס רדיאלית כדי בקרבץ את ההשפעות הלא ידועות הללו, אך נמנע מהעומס החישובי הרגיל על ידי התמקדות בכמות אחת: הנורמה המקסימלית של וקטורי המשקלים של הרשת. חוק הסתגלות זה של "נורמה מקסימלית" מקטין את מספר הפרמטרים שיש לכוונם בזמן אמת תוך שמירה על יכולת הרשת לתאר התנהגות מורכבת. כתוצאה מכך, הבקר הופך לברי יישום על חומרה מעשית אך עדיין מטפל יעיל בלי-ליניאריות והפרעות.
הוכחה מתמטית, ואז סימולציה וחומרה
מתמטית, המחברים מנתחים את הצירוף של התצפיתן והבקר באמצעות תאוריית ליאפונוב, כלי סטנדרטי לחקר יציבות. הם מראים ששגיאות ההערכה של התצפיתן, שגיאת מעקב המיקום ושגיאת ההסתגלות של הרשת העצבים כולם מתכנסים לשכנות קטנות סביב האפס בזמן סופי, גם בנוכחות הפרעות בגבול נתון. אחר כך הם בודקים את העיצוב בסימולציות מחשב, שם האקטואטור עוקב אחרי פקודת מיקום סינוסואידלית תחת הפרעות חזקות משתנות בזמן. בהשוואה לשתי שיטות מתקדמות אחרות — בקרה backstepping עם רשת עצבית ובקר PID בסיוע רשת עצבית — הגישה החדשה משיגה את סטיית התקן, השגיאה הממוצעת והשגיאה המקסימלית הקטנים ביותר.
מבחני עולם אמיתי עם תנועות תובעניות
החוקרים לקחו צעד נוסף והטמיעו את הבקר שלהם על משטח ניסוי אלקטרו-הידראו-סטטי במעבדה שמשתמש רק בחיישן מיקום. הם הריצו שני תרחישים מאתגרים: תנועה עלייה רציפה במהירות קבועה ותנועה סינוסואידלית המשתנה במהירות. בשני המקרים, התצפיתן שוחזר בהצלחה את המצבים הפנימיים מהאות מיקום היחיד, מה שאפשר לבקר להגיב במהירות. השיטה המוצעת מספקת בעקביות מעקב הדוק יותר מאשר הבקרים להשוואה, עם שגיאות ממוצעת ושיא נמוכות יותר. דיוק משופר זה מגיע במחיר: אות הבקרה יותר אנרגטי ומציג פעולה בתדר גבוה בולטת, המשקפת את התיקונים החזקים המשמשים לדחיית הפרעות.
מה זה אומר למכונות העתיד
במונחים פשוטים, עבודה זו מראה שאפשר לשלוט באופן מדויק ומהיר יותר על מנועי הידראוליקה כבדים, תוך שימוש בפחות חיישנים וללא מודל מתמטי מושלם. על ידי שילוב מבנה בקרה המתכנס במהירות, חוק הסתגלות רזה לרשת עצבית ותצפיתן מצב, המחברים מראים הן תיאורטית והן בניסויים שאקטואטור אלקטרו-הידראו-סטטי יכול לעקוב אחרי פקודות תנועה תובעניות עם שגיאות קטנות יותר מאשר שיטות מתחרות. התקדמויות כאלה יכולות להתבטא ברובוטים תעשייתיים מדויקים יותר, מערכות אקטואציה בטוחות יותר למטוסים וציוד בנייה יעיל יותר. מחקר עתידי יכוון לכוונון מדויק יותר של מקדמי הבקר ולהקטנת אותם רטיטות (chattering), כדי לקרב את היתרונות האלה לפריסה במוצרים ממשיים.
ציטוט: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
מילות מפתח: אקטואטור אלקטרו-הידראו-סטטי, בקרת תנועה הידראולית, בקרה הסתגלית, יציבות בזמן סופי, תצפיתן רשת עצבית