Clear Sky Science · de
Positionsregelung von elektro-hydrostatischen Aktuatoren mittels adaptiver endlicher Zeit Backstepping- und Zustandsbeobachtung
Schwere Maschinen glatt in Bewegung halten
Moderne Maschinen – von Flugzeugen und Schiffen bis hin zu Baumaschinen – setzen häufig leistungsstarke hydraulische Aktuatoren ein, um schwere Bauteile mit Millimeterpräzision zu bewegen. Die reale Welt ist jedoch unordentlich: Lasten ändern sich plötzlich, Sensoren sind begrenzt, und Reibung sowie Fluideffekte können die Bewegung beeinträchtigen. Dieses Paper stellt eine neue Methode zur Regelung einer speziellen Art von hydraulischem Antrieb vor, genannt elektro-hydrostatischer Aktuator mit symmetrischem Zylinder, die sicherstellt, dass die gewünschte Position auch unter solchen schwierigen Bedingungen schnell und genau erreicht wird.
Warum die Regelung hydraulischer Bewegungen schwierig ist
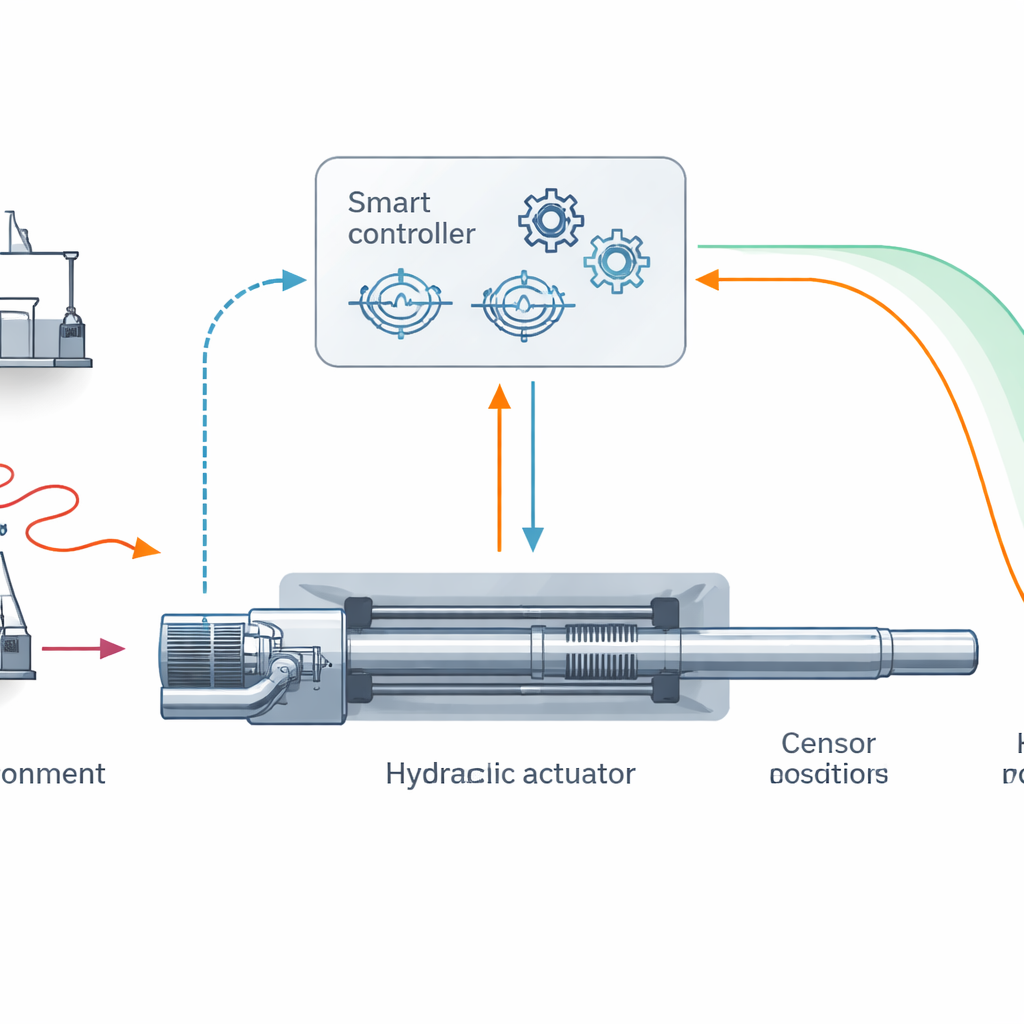
Elektro-hydrostatische Aktuatoren kombinieren ein elektrisches Servoventil, Hydraulikflüssigkeit und einen Kolben zu kompakten, kraftvollen Antriebssystemen. Sie sind attraktiv für Anwendungen, die schnelle Reaktion und hohe Zuverlässigkeit verlangen. Ihr Verhalten ist jedoch stark nichtlinear: Öl komprimiert sich, es kommt zu Leckagen und Erwärmung; äußere Lasten variieren; und nur einige Größen – typischerweise die Position – sind leicht messbar. Viele bestehende Regelverfahren benötigen mehrere Sensoren und komplexe Modelle, was Kosten erhöht und dennoch keine Garantie dafür bietet, dass der Aktuator bei Störungen die Zielposition innerhalb einer bestimmbaren Zeit erreicht.
Eine schlauere Regelungsstrategie mit weniger Sensoren
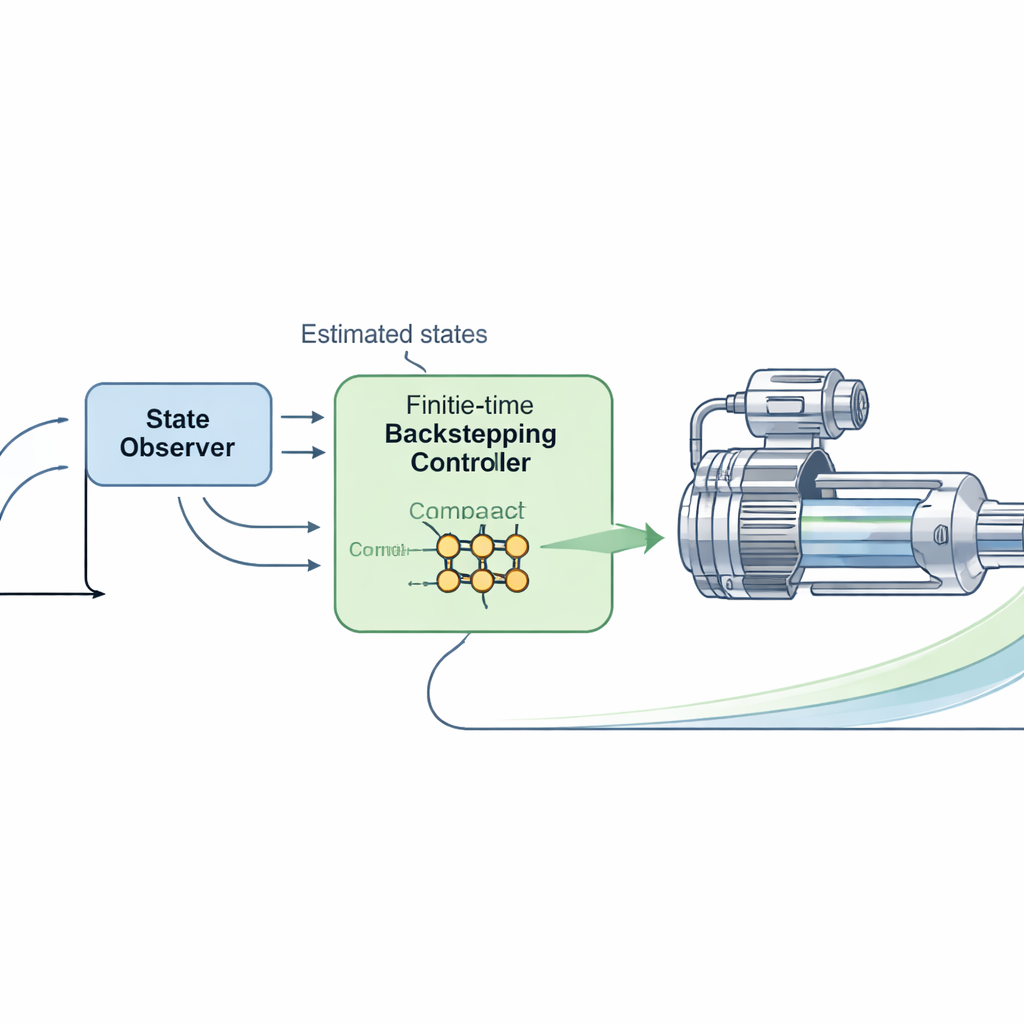
Die Autoren schlagen eine Regelstrategie vor, die mit weniger Hardware mehr erreichen will. Statt mehrere interne Variablen zu messen, gehen sie davon aus, dass nur die Kolbenposition verfügbar ist. Ein Zustandsbeobachter, eine Art mathematischer Zwilling des realen Systems, rekonstruiert die verborgenen internen Zustände aus dieser einzigen Messgröße. Darauf aufbauend entwerfen sie einen Backstepping-Regler mit endlicher Konvergenzzeit. Im Gegensatz zu herkömmlichen Verfahren, die nur versprechen, dass der Fehler sich allmählich verringert, ist die endliche-Zeit-Regelung so ausgelegt, dass der Regelungsfehler garantiert innerhalb einer berechenbaren Zeit in ein kleines Band um Null fällt, selbst wenn das System von Störungen beeinflusst wird.
Neural Networks nutzen ohne hohen Rechenaufwand
Da viele Details der hydraulischen Dynamik unsicher sind oder sich im Zeitverlauf ändern, muss sich der Regler online anpassen. Das Team verwendet ein Radial-Basis-Funktions-Netzwerk, um diese unbekannten Effekte zu approximieren, vermeidet aber die übliche Rechenlast, indem es sich auf eine einzelne Größe konzentriert: die Maximalnorm der Gewichtsvektoren des Netzwerks. Dieses Adaptionsgesetz auf Basis der Maximalnorm reduziert die Anzahl der Parameter, die in Echtzeit angepasst werden müssen, und erhält gleichzeitig die Fähigkeit des neuronalen Netzes, komplexes Verhalten zu erfassen. Dadurch wird die Implementierung des Reglers auf praktischer Hardware einfacher, während Nichtlinearitäten und Störungen weiterhin wirksam kompensiert werden.
Beweis auf dem Papier, dann Simulation und Hardware
Mathematisch analysieren die Autoren den kombinierten Beobachter–Regler mithilfe der Lyapunov-Theorie, einem Standardwerkzeug zur Untersuchung von Stabilität. Sie zeigen, dass die Schätzfehler des Beobachters, der Positionierungsfehler und der Anpassungsfehler des neuronalen Netzes alle in endlicher Zeit in kleine Umgebungen um Null konvergieren, selbst bei beschränkten Störungen. Anschließend testen sie ihr Design in Computersimulationen, in denen der Aktuator einem sinusförmigen Positionskommando unter starken, zeitvariierenden Störungen folgt. Im Vergleich zu zwei anderen fortgeschrittenen Methoden – einem Backstepping-Regler mit neuronalen Netzen und einem neuronalen Netzwerk-unterstützten PID-Regler – erzielt der neue Ansatz die kleinste Standardabweichung, den geringsten mittleren Fehler und den kleinsten Maximalfehler.
Praktische Tests mit anspruchsvollen Bewegungen
Die Forschenden gehen einen Schritt weiter und implementieren ihren Regler auf einem elektro-hydrostatischen Prüfstand im Labor, der nur einen Positionssensor verwendet. Sie führen zwei herausfordernde Szenarien durch: eine stetig ansteigende Rampenbewegung und eine schnell wechselnde sinusförmige Bewegung. In beiden Fällen rekonstruiert der Beobachter die internen Zustände erfolgreich aus dem einzelnen Positionssignal, sodass der Regler schnell reagieren kann. Die vorgeschlagene Methode liefert wiederholt genauere Nachführung als die Vergleichsregler, mit geringeren mittleren und Spitzenfehlern. Diese verbesserte Genauigkeit hat jedoch einen Preis: das Stellgliedsignal ist energieintensiver und zeigt spürbare hochfrequente Anteile, was die starken Korrekturen widerspiegelt, die zur Unterdrückung von Störungen eingesetzt werden.
Was das für künftige Maschinen bedeutet
Einfach gesagt zeigt diese Arbeit, dass leistungsfähige hydraulische Antriebe präziser und schneller geregelt werden können, mit weniger Sensoren und ohne perfektes Modell. Durch die Kombination einer schnell konvergierenden Regelstruktur, einer schlanken Adaptionsregel für das neuronale Netz und eines Zustandsbeobachters demonstrieren die Autoren sowohl theoretisch als auch experimentell, dass ein elektro-hydrostatischer Aktuator anspruchsvolle Bewegungsbefehle mit kleineren Fehlern als konkurrierende Methoden ausführen kann. Solche Fortschritte könnten in genaueren Industrierobotern, sichereren Flugzeugaktuierungssystemen und effizienteren Baumaschinen resultieren. Zukünftige Forschung wird darauf abzielen, die Abstimmung der Reglerverstärkungen zu verfeinern und das Chattering zu reduzieren, um diese Vorteile näher an eine praktische Produktreife zu bringen.
Zitation: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
Schlüsselwörter: elektro-hydrostatischer Aktuator, hydraulische Bewegungsregelung, adaptive Regelung, endliche-Zeit-Stabilität, Neuronaler Netzwerkbeobachter