Clear Sky Science · it
Controllo del posizionamento di attuatori elettro-idrostatici tramite backstepping adattativo a tempo finito e osservazione di stato
Mantenere le macchine pesanti in movimento in modo fluido
Le macchine moderne — dagli aeromobili e le navi alle attrezzature per l’edilizia — spesso si affidano a potenti attuatori idraulici per muovere parti pesanti con precisione dell’ordine del millimetro. Ma le condizioni reali sono complesse: i carichi variano bruscamente, i sensori sono limitati e attriti ed effetti del fluido possono deviare il movimento dal bersaglio. Questo articolo propone un nuovo modo di controllare un particolare tipo di trasmissione idraulica, chiamata attuatore elettro-idrostatico con cilindro simmetrico, in modo che raggiunga rapidamente e con precisione la posizione desiderata anche in presenza di tali condizioni difficili.
Perché controllare il moto idraulico è difficile
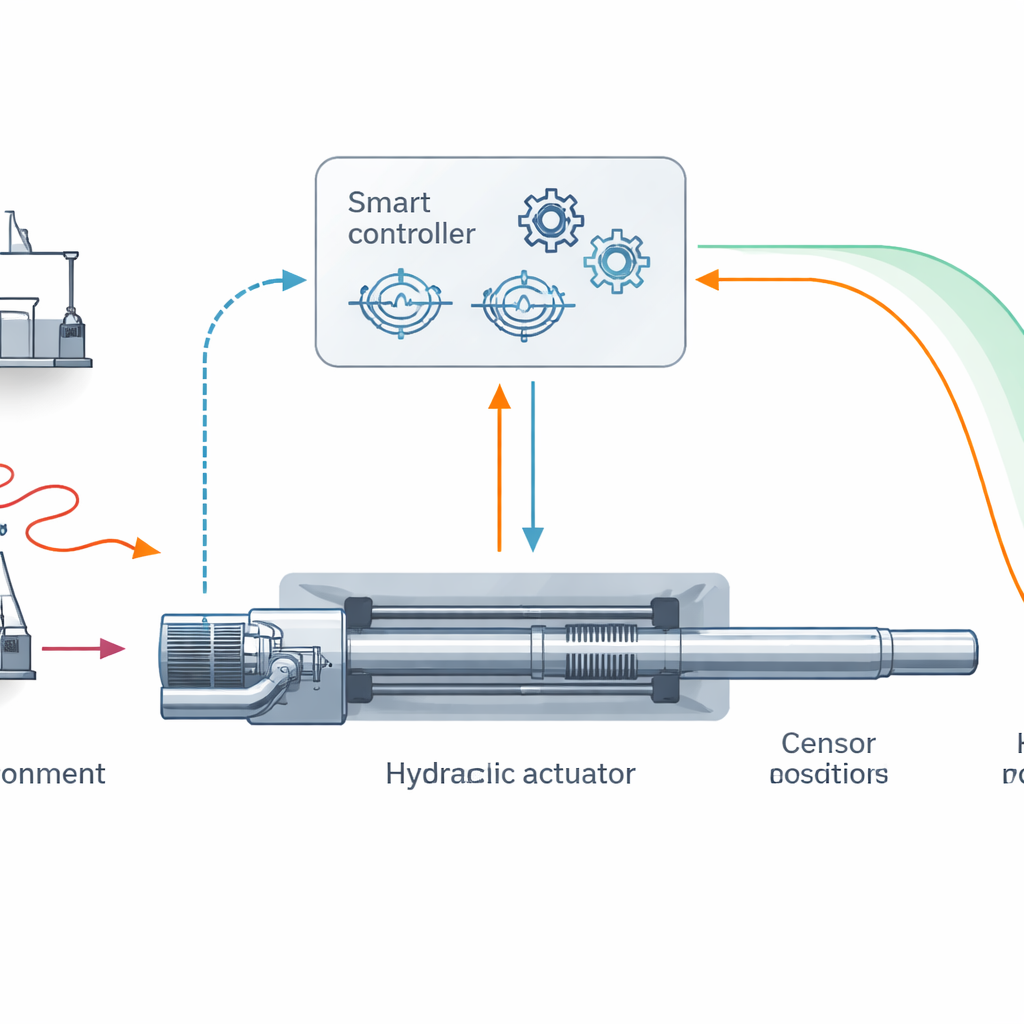
Gli attuatori elettro-idrostatici combinano una valvola servo elettrica, fluido idraulico e un pistone per creare sistemi di movimento compatti e potenti. Sono attraenti per settori che richiedono risposta rapida e alta affidabilità. Tuttavia, il loro comportamento è altamente non lineare: l’olio è comprimibile, si verificano perdite e riscaldamento; i carichi esterni variano; e solo alcune grandezze — tipicamente la posizione — sono facilmente misurabili. Molti metodi di controllo esistenti impiegano più sensori e modelli complessi, aumentando i costi e senza garantire che l’attuatore raggiunga la posizione obiettivo entro un tempo definito quando si presentano disturbi.
Una strategia di controllo più intelligente con meno sensori
Gli autori propongono una strategia di controllo pensata per ottenere di più con meno hardware. Invece di misurare diverse variabili interne, assumono che sia disponibile solo la posizione del pistone. Un osservatore di stato, una sorta di gemello matematico del sistema reale, ricostruisce gli stati interni nascosti a partire da questa singola misura. Su questa base progettano un regolatore backstepping a tempo finito. Diversamente dagli schemi convenzionali che promettono solo una riduzione graduale dell’errore, il controllo a tempo finito è costruito in modo che l’errore di inseguimento sia garantito rientrare in una piccola banda attorno a zero entro un tempo calcolabile, anche quando il sistema è soggetto a disturbi.
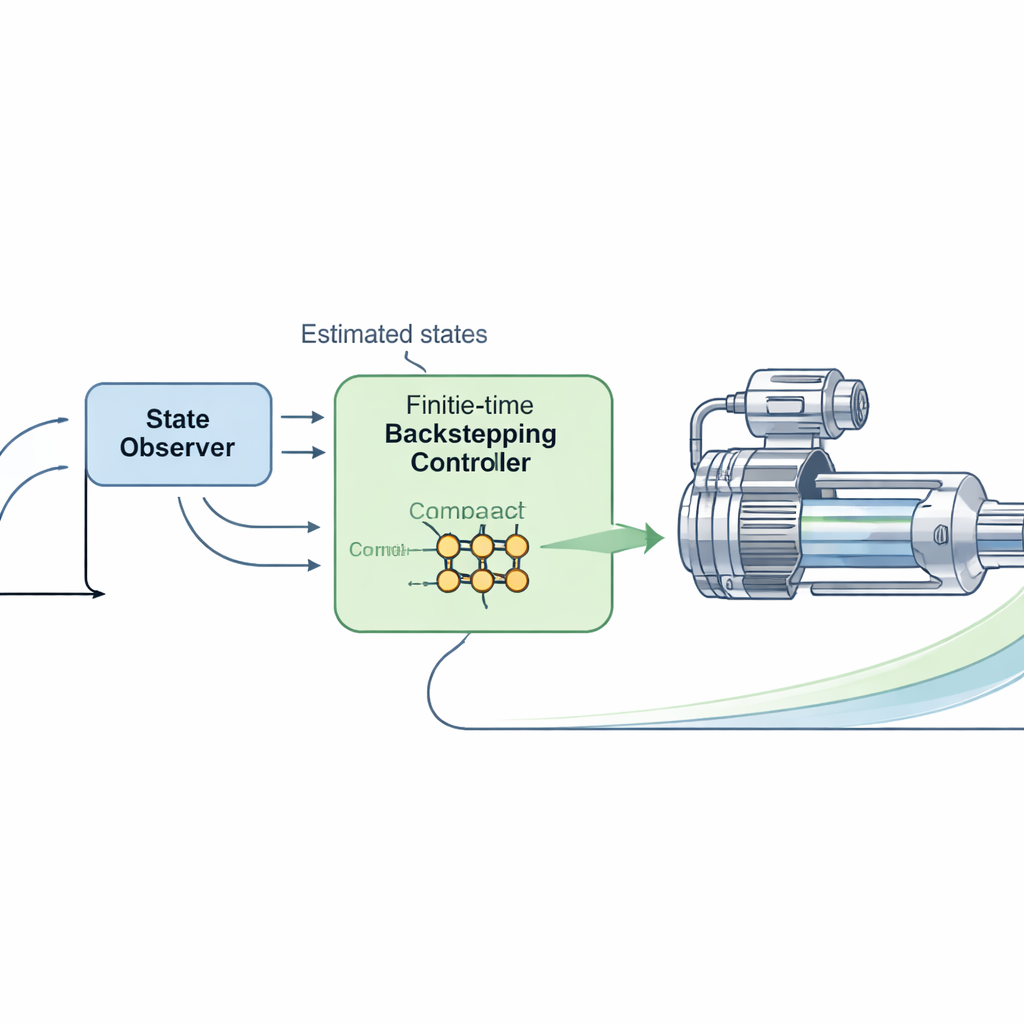
Usare reti neurali senza pesanti calcoli
Poiché molti dettagli della dinamica idraulica sono incerti o variabili nel tempo, il regolatore deve adattarsi in tempo reale. Il gruppo utilizza una rete neurale a funzione di base radiale per approssimare questi effetti sconosciuti, ma evita il consueto onere computazionale concentrandosi su una singola quantità: la norma massima dei vettori di peso della rete. Questa legge di adattamento basata sulla "norma massima" riduce il numero di parametri da aggiornare in tempo reale preservando la capacità della rete neurale di catturare comportamenti complessi. Di conseguenza, il controllore risulta più semplice da implementare su hardware pratico pur gestendo efficacemente non linearità e disturbi.
Dimostrazione teorica, poi simulazione e sperimentazione
Dal punto di vista matematico, gli autori analizzano il sistema osservatore–regolatore combinato usando la teoria di Lyapunov, uno strumento standard per studiare la stabilità. Dimostrano che gli errori di stima dell’osservatore, l’errore di inseguimento della posizione e l’errore di adattamento della rete neurale convergono tutti a piccoli intorni di zero in tempo finito, anche in presenza di disturbi limitati. Testano quindi il progetto in simulazioni al computer, dove l’attuatore segue un comando di posizione sinusoidale sotto forti disturbi variabili nel tempo. Rispetto a due altri metodi avanzati — un controllore backstepping con rete neurale e un controllore PID assistito da rete neurale — il nuovo approccio ottiene la deviazione standard, l’errore medio e l’errore massimo più piccoli.
Test sul campo con moti impegnativi
I ricercatori fanno un passo avanti implementando il loro controllore su un banco prova elettro-idrostatico di laboratorio che utilizza solo un sensore di posizione. Eseguono due scenari impegnativi: un moto a rampa a incremento costante e un moto sinusoidale a variazione rapida. In entrambi i casi l’osservatore ricostruisce con successo gli stati interni dal segnale di posizione singolo, permettendo al controllore di reagire prontamente. Il metodo proposto fornisce costantemente un inseguimento più preciso rispetto ai regolatori di confronto, con errori medi e di picco inferiori. Questa precisione migliorata ha però un costo: il segnale di controllo è più energetico e mostra azione ad alta frequenza evidente, riflettendo le correzioni forti impiegate per respingere i disturbi.
Cosa significa per le macchine del futuro
In termini pratici, questo lavoro mostra che gli azionamenti idraulici pesanti possono essere controllati con maggiore precisione e rapidità, usando meno sensori e senza un modello matematico perfetto. Combinando una struttura di controllo a convergenza rapida, una regola di adattamento della rete neurale snella e un osservatore di stato, gli autori dimostrano sia teoricamente sia sperimentalmente che un attuatore elettro-idrostatico può seguire comandi di moto impegnativi con errori minori rispetto ai metodi concorrenti. Tali progressi potrebbero tradursi in robot industriali più accurati, sistemi di attuazione aeronautica più sicuri e macchine per l’edilizia più efficienti. Ricerche future mireranno a perfezionare la taratura dei guadagni del controllore e a ridurre il fenomeno del chattering, avvicinando questi benefici all’impiego in prodotti reali.
Citazione: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
Parole chiave: attuatori elettro-idrostatici, controllo del moto idraulico, controllo adattativo, stabilità a tempo finito, osservatore a rete neurale