Clear Sky Science · ru
Контроль позиционирования электрошидравлических приводов с помощью адаптивного конечновременного обратного шага и оценивания состояний
Обеспечение плавного движения тяжёлой техники
Современные машины — от самолётов и судов до строительной техники — часто используют мощные гидравлические приводы для перемещения тяжёлых частей с точностью до миллиметра. Но реальные условия сложны: нагрузки меняются резко, датчики ограничены, а трение и эффекты жидкости могут сбивать движение с цели. В этой статье представлен новый способ управления особым типом гидравлического привода — электрошидравлическим приводом со симметричным цилиндром — который обеспечивает быстрое и точное достижение требуемой позиции даже в таких сложных условиях.
Почему управление гидравликой сложно
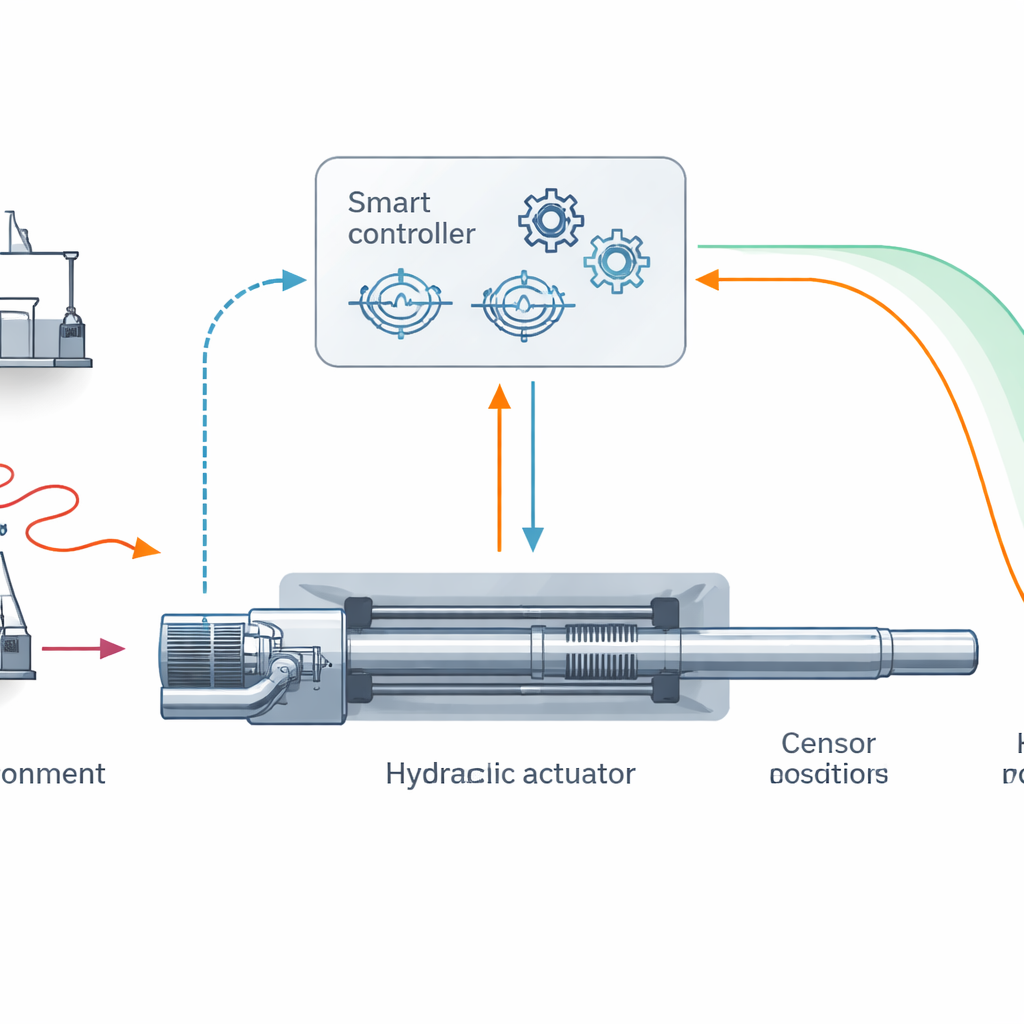
Электрошидравлические приводы объединяют электрический сервоклапан, гидравлическую жидкость и поршень, создавая мощные и компактные исполнительные механизмы. Они привлекательны для отраслей, где требуются быстрая реакция и высокая надёжность. Однако их поведение сильно нелинейно: масло сжимается, появляются утечки и нагрев; внешние нагрузки меняются; и измерить можно обычно лишь небольшое число величин — как правило, положение. Многие существующие методы управления используют множество датчиков и сложные модели, что увеличивает стоимость и всё равно не гарантирует, что привод достигнет целевой позиции в определённое время при наличии возмущений.
Более умная стратегия управления с меньшим количеством датчиков
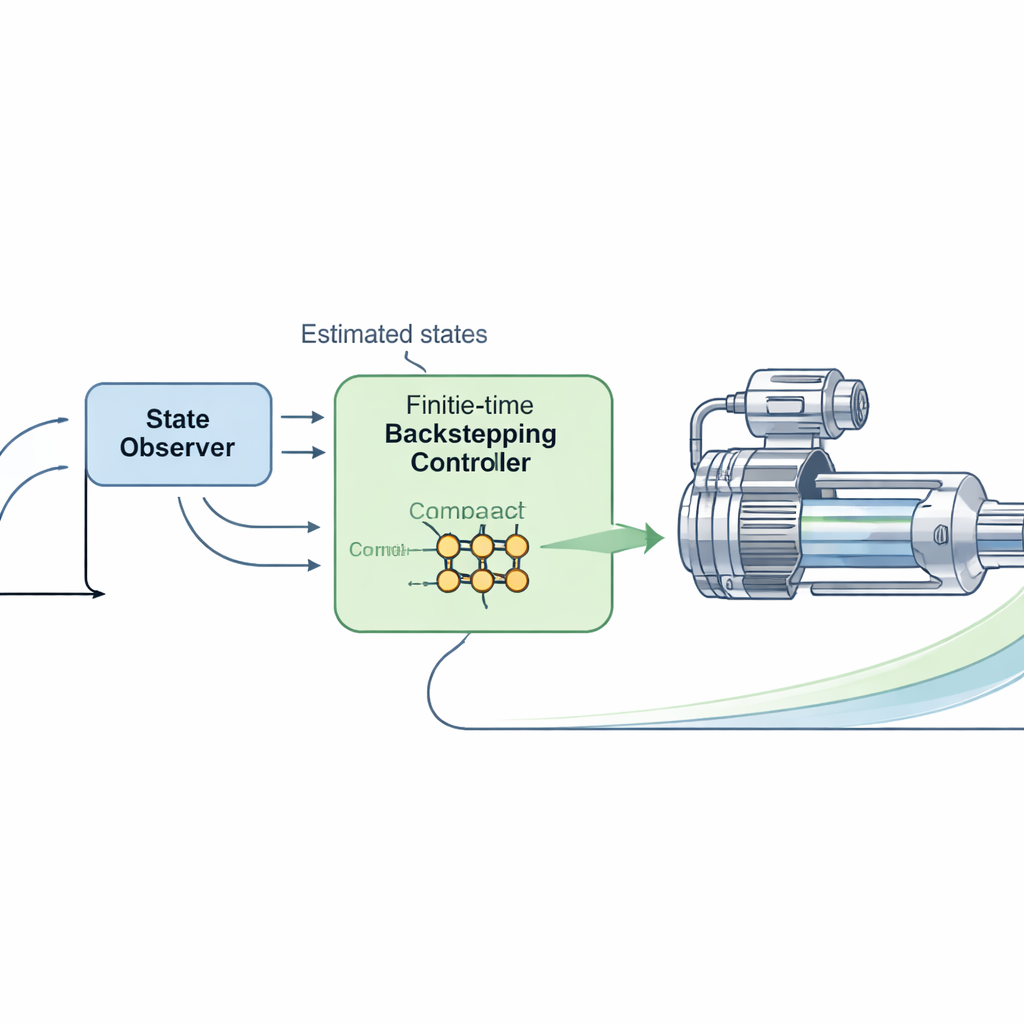
Авторы предлагают стратегию управления, которая делает больше при меньшем числе аппаратных средств. Вместо измерения множества внутренних величин они предполагают доступность только положения поршня. Наблюдатель состояния, своего рода математический двойник реальной системы, восстанавливает скрытые внутренние состояния по этому единственному измерению. Поверх этого они разрабатывают конечновременный контроллер на основе метода обратного шага (backstepping). В отличие от привычных схем, которые лишь обещают постепенное уменьшение ошибки, конечновременное управление сконструировано так, чтобы ошибка следования гарантированно попала в малую окрестность нуля в вычислимое время, даже когда система подвергается возмущениям.
Использование нейронных сетей без тяжёлых вычислений
Поскольку многие детали гидравлической динамики неопределённы или меняются со временем, контроллер должен адаптироваться на ходу. Команда использует радиально-базисную нейронную сеть для аппроксимации этих неизвестных эффектов, но избегает обычной вычислительной нагрузки, сосредотачиваясь на одной величине: максимальной норме вектор-коэффициентов сети. Закон адаптации на основе этой «максимальной нормы» уменьшает число параметров, требующих настройки в реальном времени, сохраняя при этом способность сети моделировать сложное поведение. В результате контроллер становится проще реализовать на практическом оборудовании, оставаясь эффективным при работе с нелинейностями и возмущениями.
Доказательство в теории, затем в моделировании и на оборудовании
Математически авторы анализируют объединённую схему наблюдатель–контроллер с помощью теории Ляпунова, стандартного инструмента исследования устойчивости. Они показывают, что ошибки оценки наблюдателя, ошибка позиционирования и ошибка адаптации нейросети все сходятся к малым окрестностям нуля за конечное время, даже при наличии ограниченных по амплитуде возмущений. Затем они тестируют разработку в компьютерных симуляциях, где привод следует синусоидальной траектории при сильных, зависящих от времени возмущениях. По сравнению с двумя другими продвинутыми методами — обратным шагом с нейросетью и PID-контроллером с поддержкой нейросети — новый подход показывает наименьшее стандартное отклонение, среднюю ошибку и максимальную ошибку.
Тесты в реальных условиях с требовательными траекториями
Исследователи пошли дальше и реализовали свой контроллер на лабораторном электрошидравлическом стенде, использующем только датчик положения. Они провели два сложных сценария: монотонно возрастающий режим с постоянным ускорением и быстро меняющуюся синусоидальную траекторию. В обоих случаях наблюдатель успешно восстановил внутренние состояния по единственному сигналу положения, что позволило контроллеру быстро среагировать. Предложенный метод последовательно даёт более точное следование по сравнению с контрольными алгоритмами, с меньшими средними и пиковыми ошибками. Эта повышенная точность имеет свою цену: управляющий сигнал становится более энергичным и проявляет заметную высокочастотную активность, что отражает сильные коррекции, используемые для подавления возмущений.
Что это значит для будущих машин
Проще говоря, эта работа демонстрирует, что тяжёлые гидравлические приводы можно управлять точнее и быстрее, используя меньше датчиков и без идеальной математической модели. Сочетая быстро сходящуюся структуру управления, экономичный закон адаптации нейросети и наблюдатель состояния, авторы показывают на теории и в экспериментах, что электрошидравлический привод способен выполнять требовательные команды с меньшими ошибками, чем конкурирующие методы. Такие достижения могут превратиться в более точных промышленных роботов, более безопасные системы управления рулением самолётов и более эффективную строительную технику. В будущих исследованиях планируется уточнить настройку коэффициентов контроллера и уменьшить явления дребезга (chattering), приближая эти преимущества к внедрению в реальные продукты.
Цитирование: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
Ключевые слова: электрошидравлический привод, гидравлическое управление движением, адаптивное управление, конечновременная устойчивость, наблюдатель на основе нейронной сети