Clear Sky Science · fr
Contrôle de position des actionneurs électro-hydrostatiques via backstepping adaptatif en temps fini et observation d’état
Maintenir les machines lourdes en mouvement de façon fluide
Les machines modernes — des avions et navires aux engins de chantier — reposent souvent sur des actionneurs hydrauliques puissants pour déplacer des pièces lourdes avec une précision au millimètre près. Mais les conditions réelles sont perturbées : les charges varient brusquement, les capteurs sont limités, et les frottements ainsi que les effets du fluide peuvent perturber le mouvement. Cet article présente une nouvelle méthode de commande pour un type particulier d’entraînement hydraulique, appelé actionneur électro-hydrostatiques à vérin symétrique, permettant d’atteindre la position désirée rapidement et avec précision même dans ces conditions difficiles.
Pourquoi contrôler le mouvement hydraulique est difficile
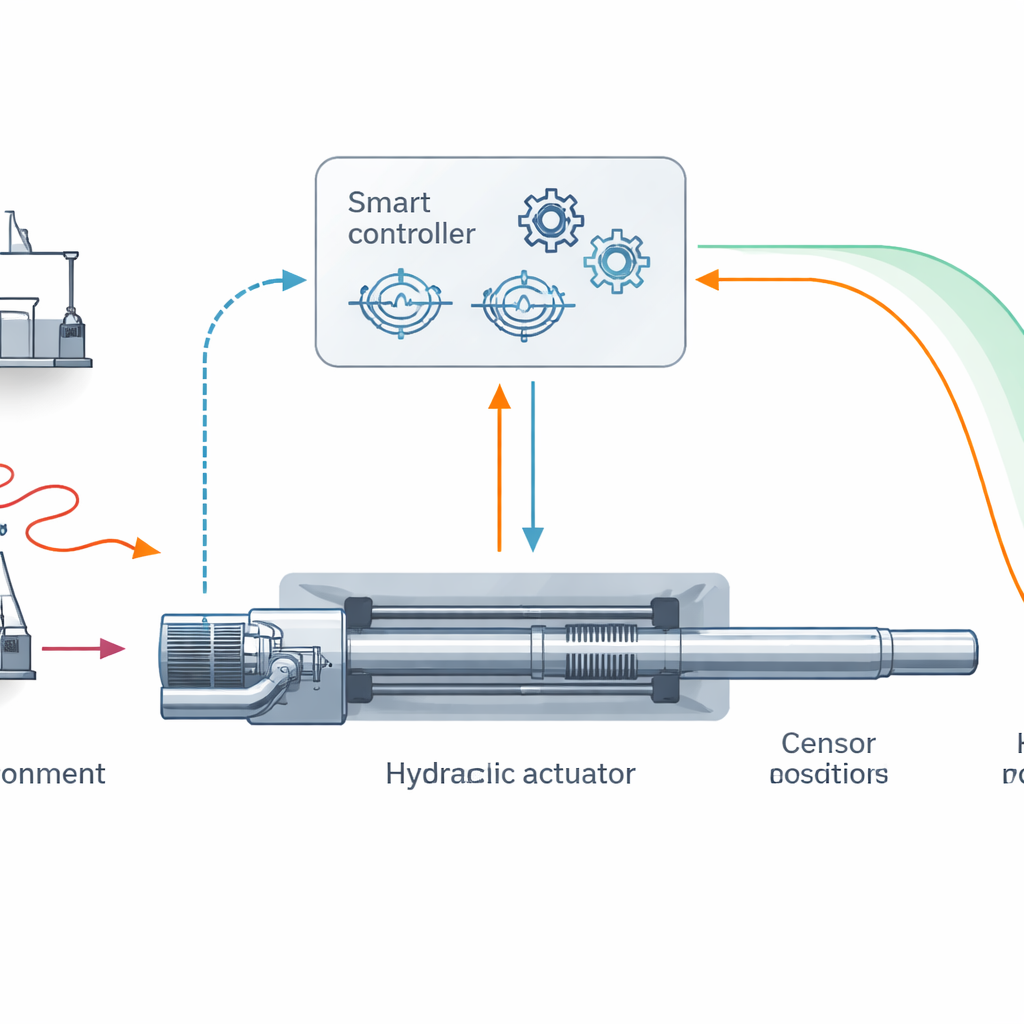
Les actionneurs électro-hydrostatiques combinent une électrovanne, un fluide hydraulique et un piston pour créer des systèmes de mouvement compacts et puissants. Ils sont attractifs pour les secteurs exigeant une réponse rapide et une grande fiabilité. Cependant, leur comportement est fortement non linéaire : l’huile se comprime, fuit et chauffe ; les charges externes varient ; et seules certaines grandeurs — typiquement la position — sont faciles à mesurer. De nombreuses méthodes de commande existantes utilisent plusieurs capteurs et des modèles complexes, ce qui augmente les coûts et ne garantit pas que l’actionneur atteindra la position cible dans un temps défini face aux perturbations.
Une stratégie de commande plus intelligente avec moins de capteurs
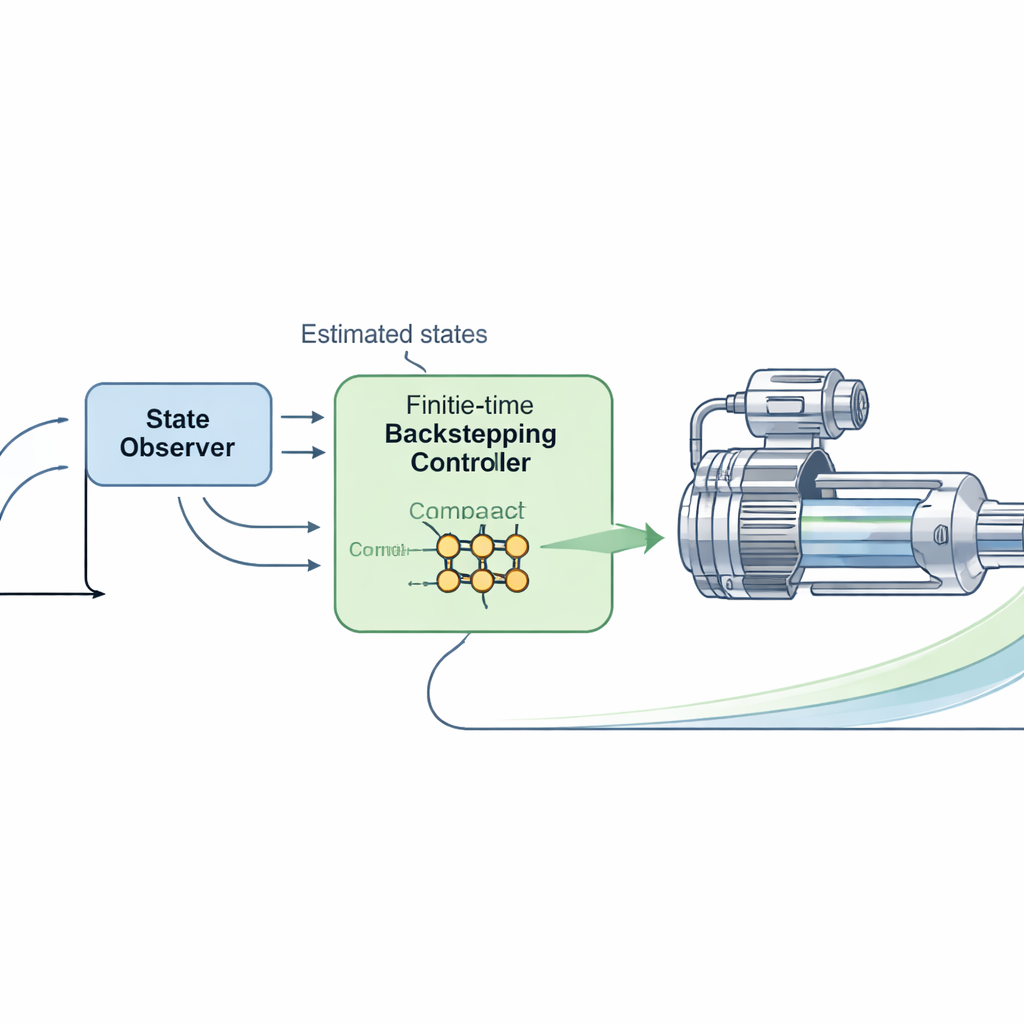
Les auteurs proposent une stratégie de commande visant à faire plus avec moins de matériel. Plutôt que de mesurer plusieurs variables internes, ils supposent que seule la position du piston est disponible. Un observateur d’état, sorte de double mathématique du système réel, reconstruit les états internes cachés à partir de cette mesure unique. Par-dessus cela, ils conçoivent un contrôleur par backstepping en temps fini. Contrairement aux schémas classiques qui promettent seulement une décroissance progressive de l’erreur, la commande en temps fini garantit que l’erreur de suivi tombera dans une petite bande autour de zéro en un temps calculable, même lorsque le système est soumis à des perturbations.
Utiliser des réseaux de neurones sans lourde charge de calcul
Parce que de nombreux détails de la dynamique hydraulique sont incertains ou évoluent avec le temps, le contrôleur doit s’adapter en continu. L’équipe utilise un réseau de neurones à fonctions de base radiales pour approximer ces effets inconnus, mais évite la charge de calcul habituelle en se concentrant sur une seule grandeur : la norme maximale des vecteurs de poids du réseau. Cette loi d’adaptation basée sur la « norme maximale » réduit le nombre de paramètres à ajuster en temps réel tout en préservant la capacité du réseau à capturer des comportements complexes. En conséquence, le contrôleur devient plus facile à implémenter sur du matériel courant tout en gérant efficacement non-linéarités et perturbations.
Preuve sur papier, puis en simulation et sur matériel
Du point de vue mathématique, les auteurs analysent l’ensemble observateur–contrôleur à l’aide de la théorie de Lyapunov, un outil standard pour l’étude de la stabilité. Ils montrent que les erreurs d’estimation de l’observateur, l’erreur de suivi de position et l’erreur d’adaptation du réseau de neurones convergent toutes vers de petits voisinages de zéro en temps fini, même en présence de perturbations bornées. Ils testent ensuite leur architecture en simulation numérique, où l’actionneur suit une consigne de position sinusoïdale sous de fortes perturbations variant dans le temps. Comparée à deux autres méthodes avancées — un contrôleur backstepping à réseau de neurones et un PID assisté par réseau de neurones — la nouvelle approche obtient la plus petite déviation standard, l’erreur moyenne et l’erreur maximale.
Tests en conditions réelles avec des mouvements exigeants
Les chercheurs vont plus loin en implantant leur contrôleur sur un banc d’essai électro-hydrostatiques de laboratoire n’utilisant qu’un capteur de position. Ils exécutent deux scénarios exigeants : un mouvement en rampe à augmentation constante et un mouvement sinusoïdal à variation rapide. Dans les deux cas, l’observateur reconstruit avec succès les états internes à partir du seul signal de position, permettant au contrôleur de réagir rapidement. La méthode proposée fournit systématiquement un suivi plus serré que les contrôleurs de comparaison, avec des erreurs moyennes et maximales plus faibles. Cette précision améliorée a toutefois un coût : le signal de commande est plus énergique et montre une action amortie à haute fréquence, traduisant les fortes corrections utilisées pour rejeter les perturbations.
Ce que cela signifie pour les machines du futur
En termes simples, ce travail montre que les entraînements hydrauliques lourds peuvent être commandés de manière plus précise et plus rapide, en utilisant moins de capteurs et sans modèle mathématique parfait. En combinant une structure de commande à convergence rapide, une règle d’adaptation sobre pour le réseau de neurones et un observateur d’état, les auteurs démontrent, sur le papier et en expérimentations, qu’un actionneur électro-hydrostatiques peut suivre des consignes de mouvement exigeantes avec des erreurs plus faibles que les méthodes concurrentes. De tels progrès pourraient se traduire par des robots industriels plus précis, des systèmes d’actionnement d’aéronefs plus sûrs et des engins de chantier plus efficaces. Les recherches futures viseront à affiner le réglage des gains du contrôleur et à réduire le phénomène de chatter, pour rapprocher ces bénéfices d’un déploiement industriel réel.
Citation: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
Mots-clés: actionneur électro-hydrostatiques, commande de mouvement hydraulique, commande adaptative, stabilité en temps fini, observateur par réseau de neurones