Clear Sky Science · pl
Sterowanie pozycją siłowników elektro-hydrostatycznych za pomocą adaptacyjnego backsteppingu o zbieżności w skończonym czasie i obserwacji stanu
Utrzymanie ciężkich maszyn w płynnym ruchu
Nowoczesne maszyny — od samolotów i statków po sprzęt budowlany — często wykorzystują potężne siłowniki hydrauliczne do przemieszczania ciężkich elementów z precyzją sięgającą milimetrów. Jednak warunki rzeczywiste są nieuporządkowane: obciążenia zmieniają się nagle, czujniki są ograniczone, a tarcie i zjawiska płynowe mogą zaburzać ruch. W artykule przedstawiono nową metodę sterowania szczególnym typem napędu hydraulicznego, zwanego siłownikiem elektro-hydrostatycznym z symetrycznym cylindrem, tak aby osiągał żądaną pozycję szybko i dokładnie nawet w takich trudnych warunkach.
Dlaczego sterowanie ruchem hydraulicznym jest trudne
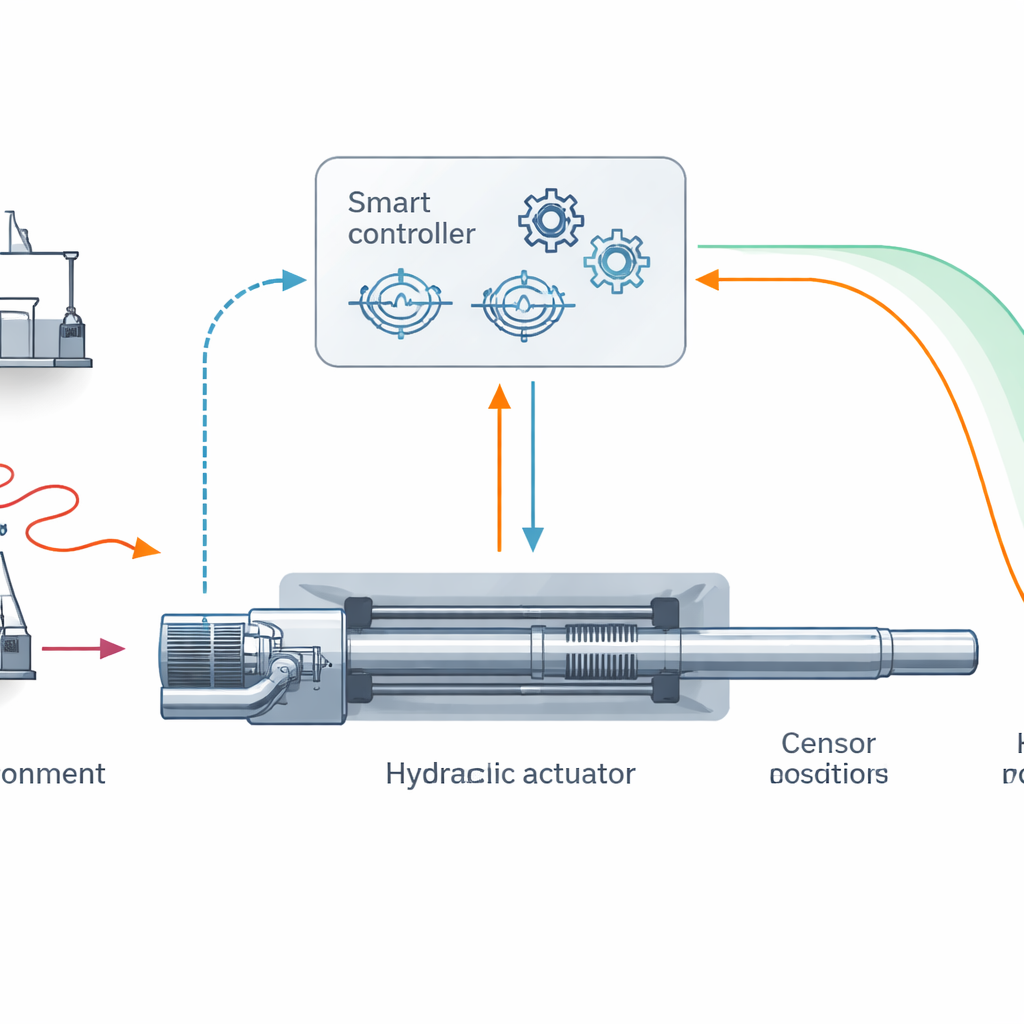
Siłowniki elektro-hydrostatyczne łączą serwowo-elektryczny zawór, płyn hydrauliczny i tłok, tworząc mocne, kompaktowe układy napędowe. Są atrakcyjne dla branż wymagających szybkiej reakcji i wysokiej niezawodności. Ich zachowanie jest jednak silnie nieliniowe: olej ulega ściśliwości, występują wycieki i nagrzewanie; obciążenia zewnętrzne się zmieniają; a tylko niektóre wielkości — zwykle pozycja — są łatwe do zmierzenia. Wiele istniejących metod sterowania używa wielu czujników i złożonych modeli, co zwiększa koszty i mimo to nie gwarantuje, że siłownik osiągnie zadaną pozycję w określonym czasie w obecności zakłóceń.
Mądrzejsza strategia sterowania przy mniejszej liczbie czujników
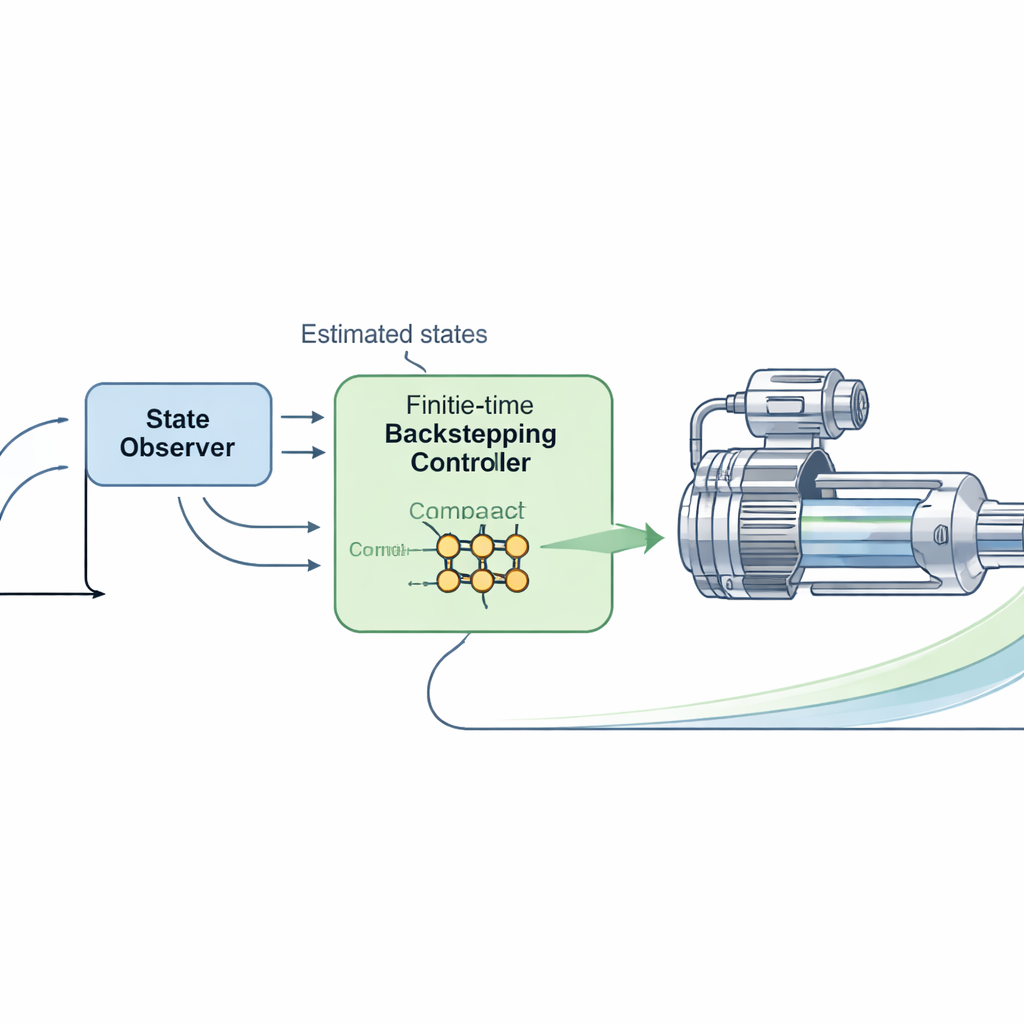
Autorzy proponują strategię sterowania, której celem jest osiągnięcie więcej przy mniejszym nakładzie sprzętowym. Zamiast mierzyć kilka wewnętrznych zmiennych, zakładają, że dostępna jest tylko pozycja tłoka. Obserwator stanu, rodzaj matematycznego bliźniaka rzeczywistego układu, rekonstruuje ukryte stany wewnętrzne na podstawie tego pojedynczego pomiaru. Na bazie tego projektują regulator typu backstepping z zbieżnością w skończonym czasie. W przeciwieństwie do konwencjonalnych schematów, które jedynie obiecują stopniowe zmniejszanie błędu, sterowanie w skończonym czasie jest skonstruowane tak, by błąd śledzenia zniknął do małego pasma wokół zera w obliczalnym czasie, nawet gdy system jest poddany zakłóceniom.
Wykorzystanie sieci neuronowych bez dużego obciążenia obliczeniowego
Ponieważ wiele szczegółów dynamiki hydraulicznej jest niepewnych lub zmienia się w czasie, regulator musi adaptować się w locie. Zespół wykorzystuje sieć neuronową z funkcjami radialnymi (RBF) do przybliżania tych nieznanych efektów, ale unika typowego obciążenia obliczeniowego, skupiając się na jednej wielkości: normie maksimum wektorów wag sieci. Reguła adaptacji oparta na „normie maksimum” zmniejsza liczbę parametrów, które trzeba dostosowywać w czasie rzeczywistym, przy zachowaniu zdolności sieci do odwzorowywania złożonych zależności. W efekcie regulator staje się łatwiejszy do implementacji na praktycznym sprzęcie, jednocześnie skutecznie radząc sobie z nieliniowościami i zakłóceniami.
Dowód na papierze, potem symulacje i testy sprzętowe
Matematycznie autorzy analizują połączenie obserwatora i regulatora przy użyciu teorii Lyapunowa, standardowego narzędzia do badania stabilności. Wykazują, że błędy estymacji obserwatora, błąd śledzenia pozycji oraz błąd adaptacji sieci neuronowej wszystkie zbieżają do małych sąsiedztw zera w skończonym czasie, nawet w obecności ograniczonych zakłóceń. Następnie testują swój projekt w symulacjach komputerowych, gdzie siłownik realizuje sinusoidalną komendę pozycji przy silnych, czasowo zmiennych zakłóceniach. W porównaniu z dwiema innymi zaawansowanymi metodami — regulatorami backstepping z siecią neuronową i wspomaganym przez sieć PID — nowe podejście osiąga najmniejszą odchyłkę standardową, błąd średni i błąd maksymalny.
Testy w rzeczywistych warunkach z wymagającymi ruchami
Badacze poszli krok dalej, implementując swój regulator na laboratoryjnym stanowisku testowym elektro-hydrostatycznym wykorzystującym wyłącznie czujnik pozycji. Przeprowadzili dwa wymagające scenariusze: ruch rampowy ze stałym narastaniem oraz szybko zmieniający się ruch sinusoidalny. W obu przypadkach obserwator poprawnie rekonstruował stany wewnętrzne z pojedynczego sygnału pozycji, co pozwalało regulatorowi reagować szybko. Proponowana metoda konsekwentnie zapewniała lepsze śledzenie niż regulatory porównawcze, z mniejszymi błędami średnimi i szczytowymi. Ta poprawiona dokładność ma jednak koszty: sygnał sterujący jest bardziej energetyczny i wykazuje zauważalną aktywność w wysokich częstotliwościach, odzwierciedlając silne korekty stosowane do odrzucania zakłóceń.
Co to oznacza dla przyszłych maszyn
Mówiąc prosto, praca ta pokazuje, że napędy hydrauliczne dużej mocy można sterować dokładniej i szybciej, używając mniejszej liczby czujników i bez idealnego modelu matematycznego. Łącząc strukturę sterowania o szybkim zbieżności, oszczędną regułę adaptacji sieci neuronowej i obserwator stanu, autorzy wykazują teoretycznie i eksperymentalnie, że siłownik elektro-hydrostatyczny może realizować wymagające trajektorie ruchu z mniejszymi błędami niż metody konkurencyjne. Takie postępy mogą przełożyć się na dokładniejsze roboty przemysłowe, bezpieczniejsze układy napędowe w lotnictwie i bardziej wydajny sprzęt budowlany. Przyszłe badania będą zmierzały do udoskonalenia strojenia wzmocnień regulatora i zmniejszenia drgań (chattering), zbliżając te korzyści do wdrożenia w produktach rzeczywistych.
Cytowanie: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
Słowa kluczowe: siłownik elektro-hydrostatyczny, sterowanie ruchem hydraulicznym, sterowanie adaptacyjne, stabilność w skończonym czasie, obserwator z wykorzystaniem sieci neuronowej