Clear Sky Science · sv
Positionsreglering av elektro-hydrostatiska ställdon via adaptiv ändlig-tid backstepping och tillståndsobservation
Hålla tunga maskiner i jämn rörelse
Moderna maskiner — från flygplan och fartyg till byggutrustning — förlitar sig ofta på kraftfulla hydrauliska ställdon för att förflytta tunga delar med millimeternoggrannhet. Men verkligheten är rörig: laster ändras plötsligt, sensorer är begränsade och friktion och vätskeeffekter kan rubba rörelsen. Denna artikel presenterar ett nytt sätt att styra en särskild typ av hydrauldrift, kallad elektro-hydrostatiskt ställdon med symmetrisk cylinder, så att den når önskad position snabbt och precist även under sådana utmanande förhållanden.
Varför styrning av hydraulisk rörelse är svårt
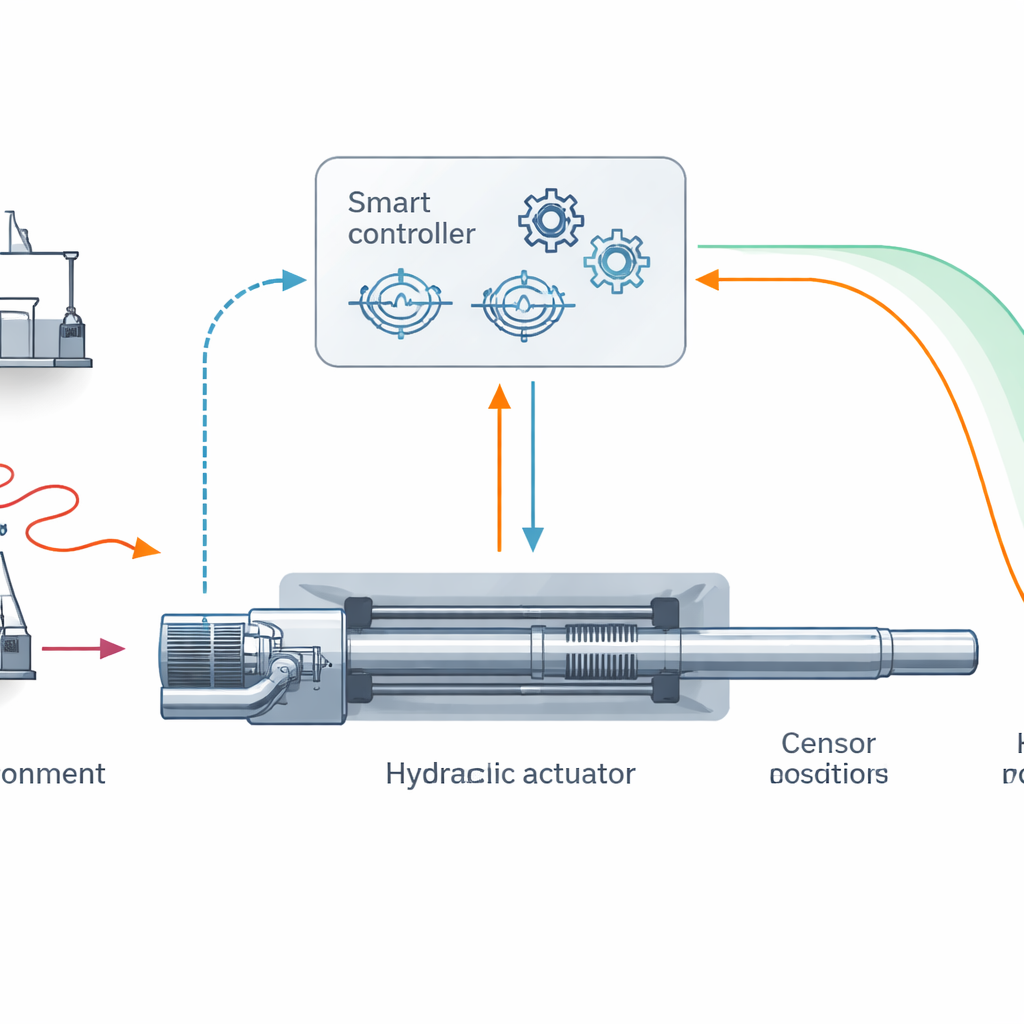
Elektro-hydrostatiska ställdon kombinerar en elektrisk servoventil, hydraulvätska och en kolv för att skapa starka, kompakta rörelsesystem. De är attraktiva för industrier som kräver snabb respons och hög tillförlitlighet. Deras beteende är dock starkt icke-linjärt: oljan komprimeras, läcker och värms upp; yttre laster varierar; och endast vissa storheter — vanligtvis position — är lätta att mäta. Många befintliga styrmetoder använder flera sensorer och komplexa modeller, vilket ökar kostnaden och ändå inte kan garantera att ställdonet når målpunkten inom en bestämd tid när störningar uppstår.
En smartare styrstrategi med färre sensorer
Författarna föreslår en styrstrategi som syftar till att göra mer med mindre hårdvara. Istället för att mäta flera interna variabler antar de att endast kolvpositionen är tillgänglig. En tillståndsobservatör, en slags matematisk tvilling till verkligt system, rekonstruerar de dolda interna tillstånden från denna enda mätning. Ovanpå detta utformar de en "ändlig-tids" backstepping-regulator. Till skillnad från konventionella scheman som bara lovar att felet krymper gradvis, är ändlig-tidsstyrning konstruerad så att spårningsfelet garanterat faller inom ett litet band runt noll inom en beräkningsbar tid, även när systemet påverkas av störningar.
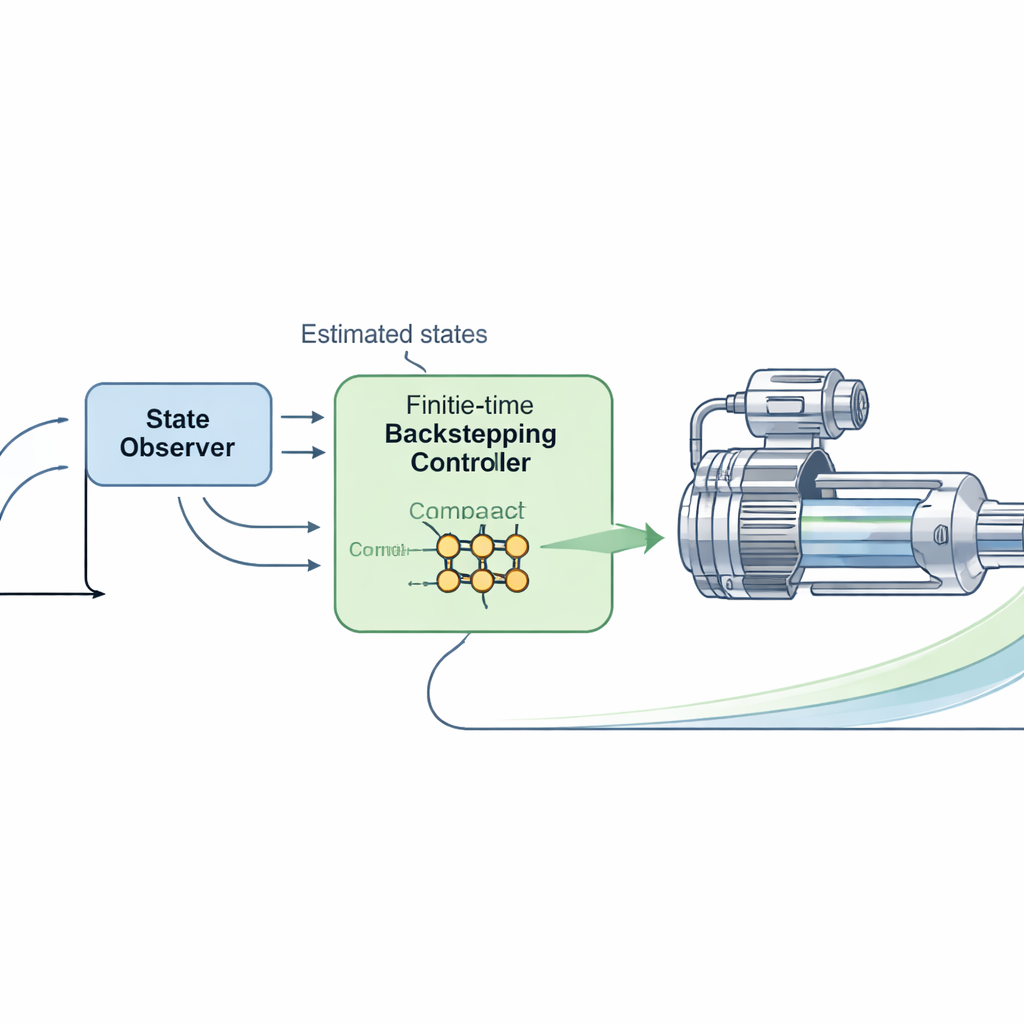
Använda neurala nätverk utan tung beräkning
Eftersom många detaljer i de hydrauliska dynamikerna är osäkra eller förändras över tid måste regulatorn anpassa sig i realtid. Teamet använder ett radiellt basfunktion-neuralt nätverk för att approximera dessa okända effekter, men undviker den vanliga beräkningsbördan genom att fokusera på en enda kvantitet: maximalnormen av nätverkets viktvektorer. Denna anpassningslag baserad på maximalnorm minskar antalet parametrar som måste justeras i realtid samtidigt som nätverkets förmåga att fånga komplexa beteenden bevaras. Som ett resultat blir regulatorn lättare att implementera på praktisk hårdvara samtidigt som den effektivt hanterar icke-linjäriteter och störningar.
Bevis i teorin, sedan i simulering och hårdvara
Matematiskt analyserar författarna den kombinerade observatör–regulatorn med Lyapunov-teori, ett standardverktyg för att studera stabilitet. De visar att observerns skattningsfel, positionsspårningsfelet och anpassningsfelet för det neurala nätverket alla konvergerar till små närliggande områden runt noll på ändlig tid, även i närvaro av begränsade störningar. Därefter testar de sin design i datorsimuleringar, där ställdonet följer en sinusformad positionssignal under starka, tidsvarierande störningar. Jämfört med två andra avancerade metoder — en backstepping-regulator med neuralt nätverk och en neuralt assisterad PID-regulator — uppnår den nya metoden lägst standardavvikelse, medelfel och maxfel.
Verkliga tester med krävande rörelser
Forskarna går ett steg längre genom att implementera sin regulator på ett laboratoriumtestbänk för elektro-hydrostatiska system som endast använder en positionssensor. De kör två utmanande scenarier: en stadigt ökande rampmotion och en snabbförändrande sinusrörelse. I båda fallen rekonstruerar observatören framgångsrikt de interna tillstånden från den enda positionssignalen, vilket gör att regulatorn kan reagera snabbt. Den föreslagna metoden levererar konsekvent tätare spårning än jämförelsemetoderna, med lägre medel- och toppfel. Denna förbättrade noggrannhet har dock sitt pris: styrsignalen är mer energirik och uppvisar märkbar högfrekvent aktivitet, vilket speglar kraftiga korrigeringar för att motverka störningar.
Vad detta betyder för framtida maskiner
Enkelt uttryckt visar arbetet att tunga hydrauliska drivningar kan styras mer precist och snabbare, med färre sensorer och utan en perfekt matematisk modell. Genom att kombinera en snabbt konvergerande styrstruktur, en slank anpassningsregel för neurala nätverk och en tillståndsobservatör demonstrerar författarna både teoretiskt och experimentellt att ett elektro-hydrostatiskt ställdon kan följa krävande rörelsekommandon med mindre fel än konkurrerande metoder. Sådana framsteg kan översättas till mer exakta industriroboter, säkrare flygplansaktuatorer och effektivare byggmaskiner. Framtida forskning kommer att inrikta sig på att förfina inställningen av regulatorns vinster och minska chattering, för att föra dessa fördelar närmare användning i verkliga produkter.
Citering: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
Nyckelord: elektro-hydrostatiskt ställdon, hydraulisk rörelsestyrning, adaptiv reglering, ändlig-tidsstabilitet, neuralt nätverksobservatör