Clear Sky Science · pt
Controle de rastreamento de posição de atuadores eletro-hidrostáticos via retrocesso adaptativo em tempo finito e observação de estado
Manter Máquinas Pesadas em Movimento Suave
Máquinas modernas — desde aeronaves e navios até equipamentos de construção — frequentemente dependem de potentes atuadores hidráulicos para mover partes pesadas com precisão de nível milimétrico. Mas as condições reais são desafiadoras: cargas mudam de forma abrupta, sensores são limitados, e atrito e efeitos do fluido podem desviar o movimento do alvo. Este artigo apresenta uma nova forma de controlar um tipo particular de acionamento hidráulico, chamado atuador eletro-hidrostático com cilindro simétrico, de modo que ele alcance a posição desejada de forma rápida e precisa mesmo sob essas condições adversas.
Por Que Controlar Movimento Hidráulico é Difícil
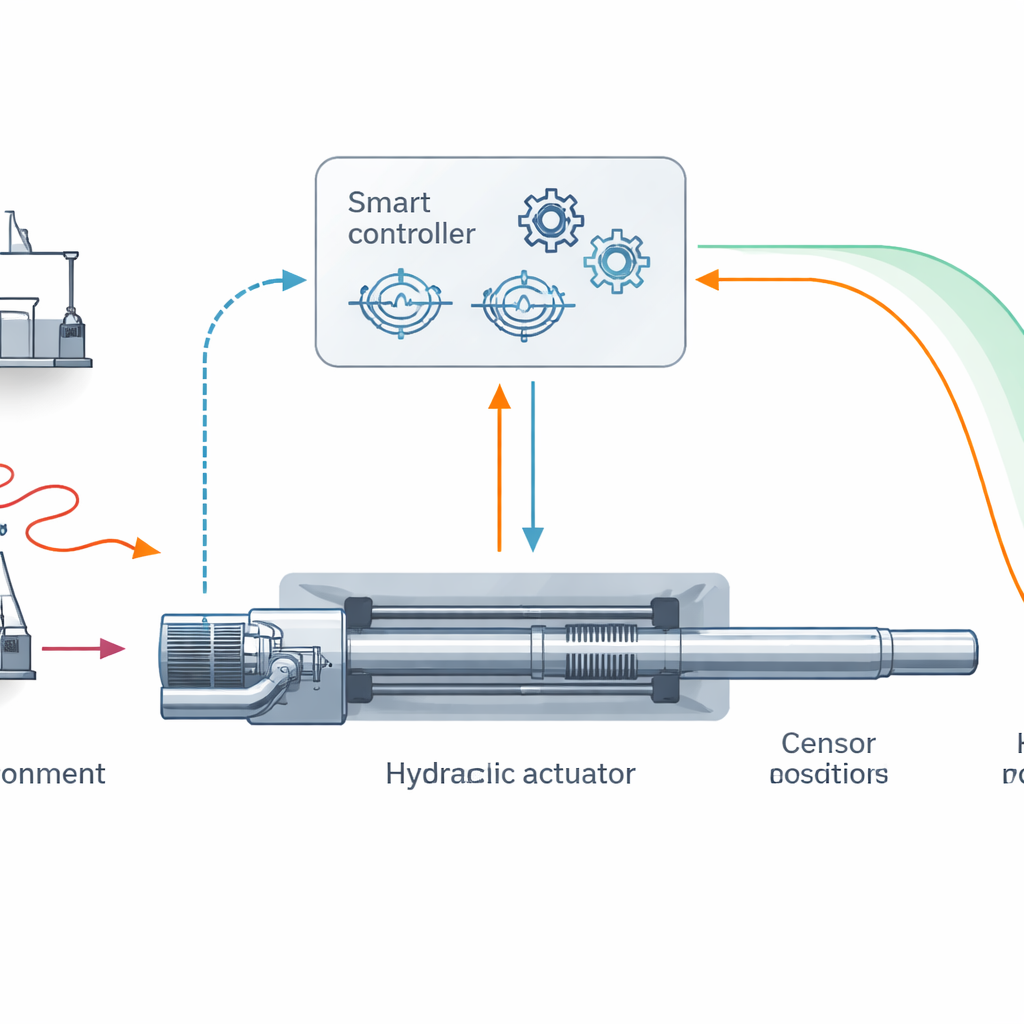
Os atuadores eletro-hidrostáticos combinam uma válvula servo elétrica, fluido hidráulico e um pistão para criar sistemas de movimento compactos e de alta potência. Eles são atraentes para indústrias que exigem resposta rápida e alta confiabilidade. No entanto, seu comportamento é altamente não linear: o óleo se comprime, vaza e aquece; cargas externas variam; e apenas algumas grandezas — tipicamente a posição — são fáceis de medir. Muitos métodos de controle existentes usam múltiplos sensores e modelos complexos, o que eleva o custo e ainda assim não garante que o atuador alcance a posição alvo dentro de um tempo definido quando ocorrem perturbações.
Uma Estratégia de Controle Mais Inteligente com Menos Sensores
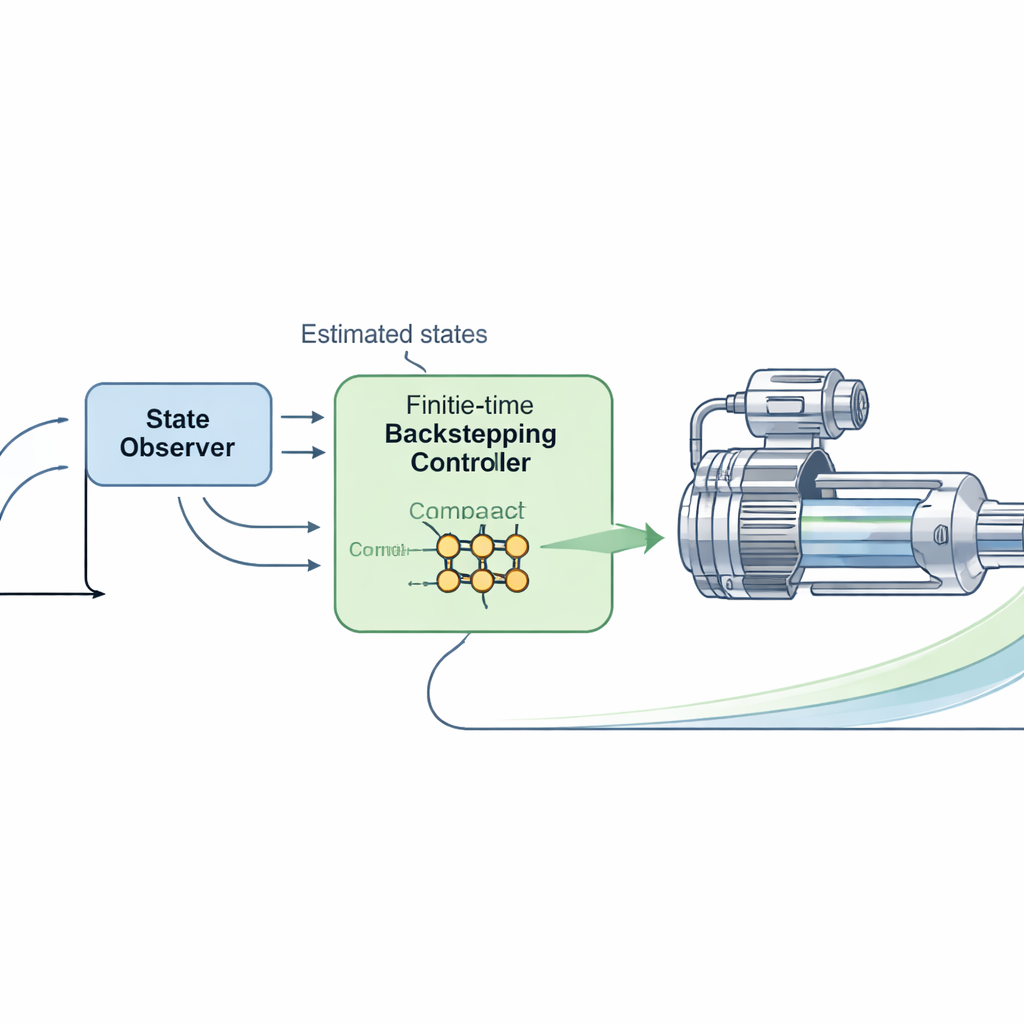
Os autores propõem uma estratégia de controle que busca fazer mais com menos hardware. Em vez de medir várias variáveis internas, eles assumem que apenas a posição do pistão está disponível. Um observador de estado, uma espécie de gêmeo matemático do sistema real, reconstrói os estados internos ocultos a partir dessa única medida. Sobre isso, eles projetam um controlador por retrocesso (backstepping) em tempo finito. Ao contrário de esquemas convencionais que apenas prometem que o erro diminuirá gradualmente, o controle em tempo finito é construído para que o erro de rastreamento seja garantido entrar em uma pequena faixa em torno de zero dentro de um tempo calculável, mesmo quando o sistema é perturbado.
Usando Redes Neurais Sem Computação Pesada
Como muitos detalhes da dinâmica hidráulica são incertos ou mudam ao longo do tempo, o controlador deve se adaptar em tempo real. A equipe usa uma rede neural de função base radial para aproximar esses efeitos desconhecidos, mas evita o habitual ônus computacional ao focar em uma única grandeza: a norma máxima dos vetores de pesos da rede. Essa lei de adaptação por "norma máxima" reduz o número de parâmetros que precisam ser ajustados em tempo real, preservando a capacidade da rede neural de capturar comportamentos complexos. Como resultado, o controlador fica mais fácil de implementar em hardware prático, mantendo a habilidade de lidar com não linearidades e perturbações de forma eficaz.
Prova no Papel, Depois em Simulação e Hardware
Matematicamente, os autores analisam o conjunto observador–controlador usando a teoria de Lyapunov, uma ferramenta padrão para estudar estabilidade. Eles mostram que os erros de estimativa do observador, o erro de rastreamento de posição e o erro de adaptação da rede neural convergem todos para pequenas vizinhanças ao redor de zero em tempo finito, mesmo na presença de perturbações limitadas. Em seguida, testam o projeto em simulações por computador, onde o atuador segue um comando de posição senoidal sob fortes perturbações variantes no tempo. Comparado com outros dois métodos avançados — um controlador backstepping com rede neural e um controlador PID assistido por rede neural — a nova abordagem obtém o menor desvio padrão, erro médio e erro máximo.
Testes no Mundo Real com Movimentos Exigentes
Os pesquisadores vão além ao implementar seu controlador em uma bancada de testes eletro-hidrostática de laboratório que usa apenas um sensor de posição. Eles executam dois cenários desafiadores: um movimento em rampa de aumento constante e um movimento senoidal de variação rápida. Em ambos os casos, o observador reconstrói com sucesso os estados internos a partir do único sinal de posição, permitindo que o controlador reaja prontamente. O método proposto fornece consistentemente um rastreamento mais preciso do que os controladores de comparação, com erros médios e máximos menores. Essa maior acurácia tem um custo: o sinal de controle é mais energético e apresenta ação de alta frequência perceptível, refletindo as fortes correções usadas para rejeitar perturbações.
O Que Isso Significa para Máquinas Futuras
Em termos práticos, este trabalho mostra que acionamentos hidráulicos de alta potência podem ser controlados com mais precisão e rapidez, usando menos sensores e sem um modelo matemático perfeito. Ao combinar uma estrutura de controle de convergência rápida, uma regra de adaptação de rede neural enxuta e um observador de estado, os autores demonstram tanto teoricamente quanto experimentalmente que um atuador eletro-hidrostático pode seguir comandos de movimento exigentes com erros menores do que métodos concorrentes. Tais avanços podem se traduzir em robôs industriais mais precisos, sistemas de atuadores de aeronaves mais seguros e máquinas de construção mais eficientes. Pesquisas futuras visam refinar a sintonia dos ganhos do controlador e reduzir o chattering, aproximando esses benefícios da implantação em produtos do mundo real.
Citação: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
Palavras-chave: atuador eletro-hidrostático, controle de movimento hidráulico, controle adaptativo, estabilidade em tempo finito, observador por rede neural