Clear Sky Science · en
Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation
Keeping Heavy Machines Moving Smoothly
Modern machines—from aircraft and ships to construction equipment—often rely on powerful hydraulic actuators to move heavy parts with millimeter-level precision. But real-world conditions are messy: loads change suddenly, sensors are limited, and friction and fluid effects can throw motion off target. This paper presents a new way to control a particular kind of hydraulic drive, called an electro-hydrostatic actuator with a symmetrical cylinder, so that it reaches the desired position quickly and accurately even under such challenging conditions.
Why Controlling Hydraulic Motion Is Hard
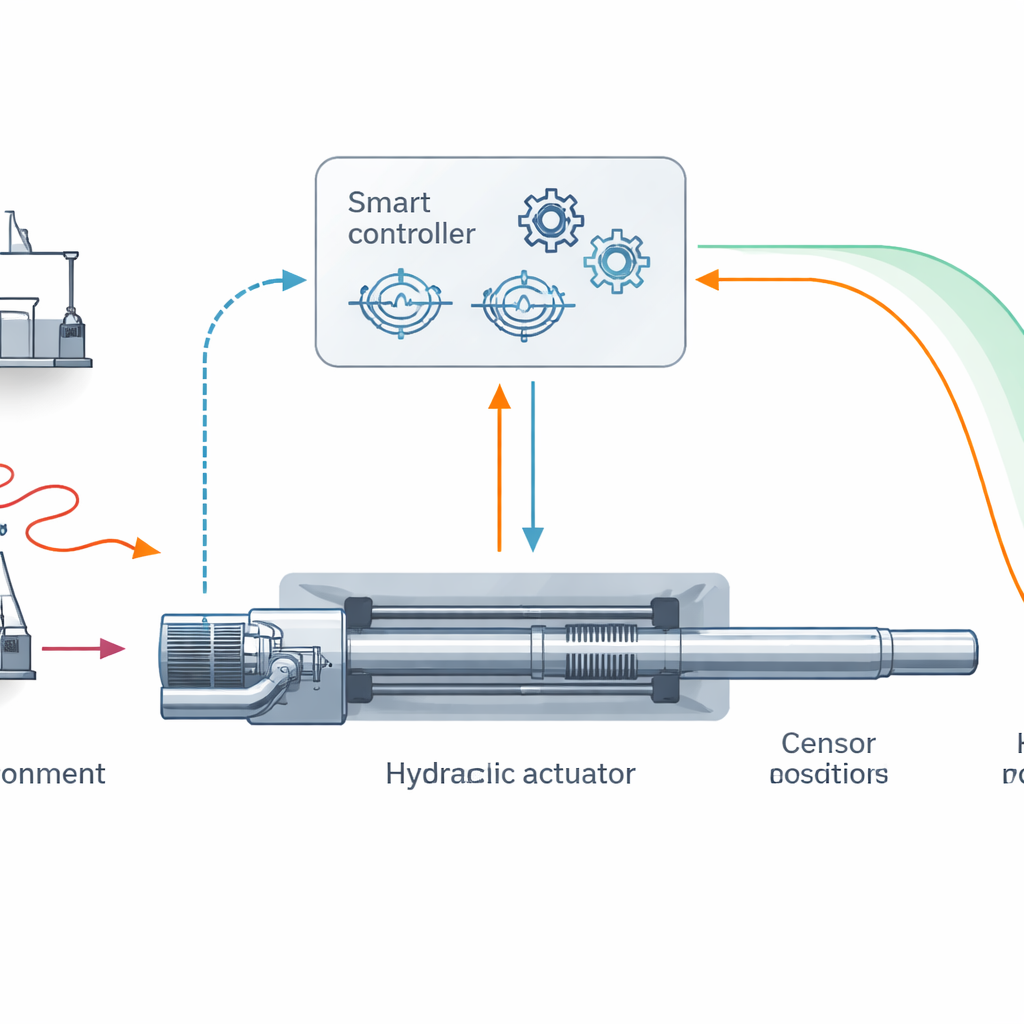
Electro-hydrostatic actuators combine an electric servo valve, hydraulic fluid, and a piston to create strong, compact motion systems. They are attractive for industries that demand fast response and high reliability. However, their behavior is highly nonlinear: the oil compresses, leaks, and heats; external loads vary; and only some quantities—typically position—are easy to measure. Many existing control methods use multiple sensors and complex models, which raise cost and still cannot guarantee that the actuator reaches the target position within a definite time when disturbances occur.
A Smarter Control Strategy With Fewer Sensors
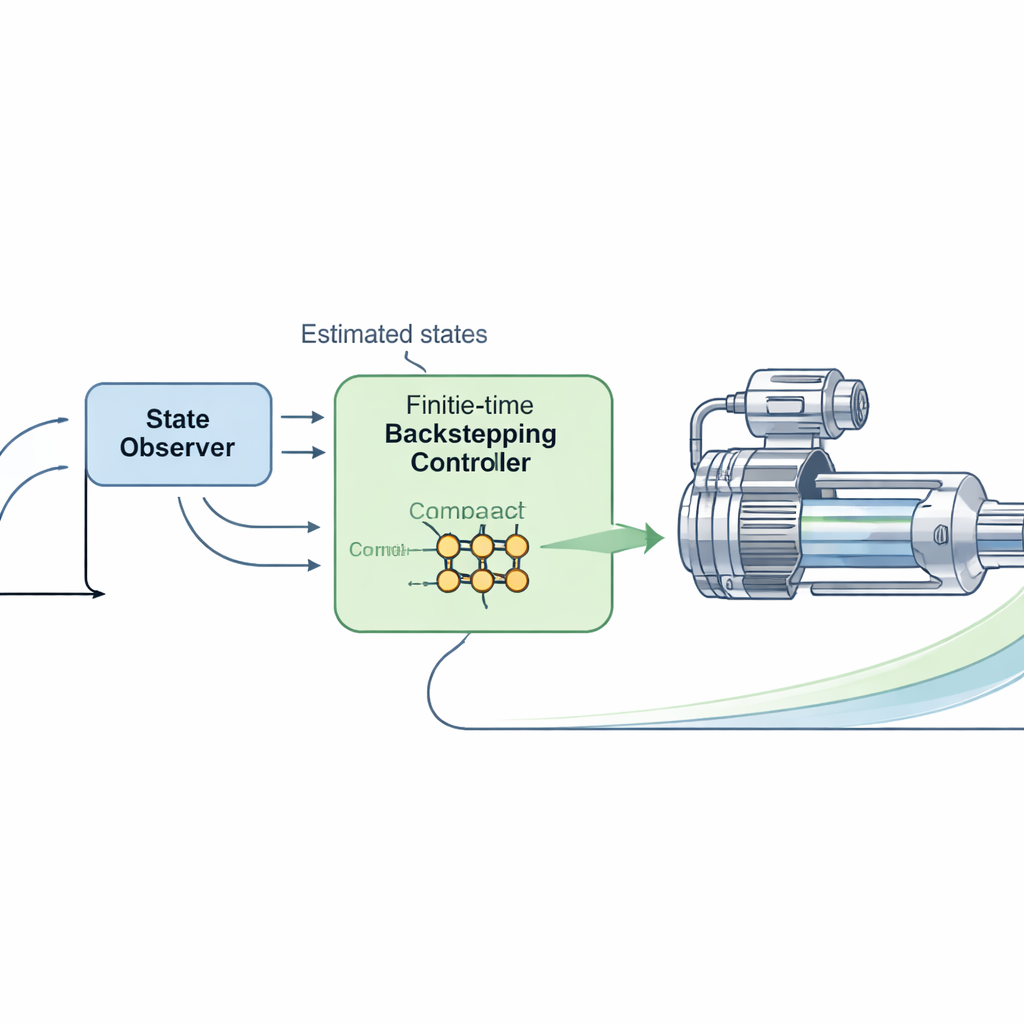
The authors propose a control strategy that aims to do more with less hardware. Instead of measuring several internal variables, they assume that only the piston position is available. A state observer, a kind of mathematical twin of the real system, reconstructs the hidden internal states from this single measurement. On top of this, they design a "finite-time" backstepping controller. Unlike conventional schemes that only promise the error will shrink gradually, finite-time control is built so that the tracking error is guaranteed to fall into a small band around zero within a calculable time, even when the system is shaken by disturbances.
Using Neural Networks Without Heavy Computation
Because many details of the hydraulic dynamics are uncertain or change over time, the controller must adapt on the fly. The team uses a radial basis function neural network to approximate these unknown effects, but they avoid the usual computational burden by focusing on a single quantity: the maximum norm of the network’s weight vectors. This "maximum norm" adaptation law reduces the number of parameters that must be adjusted in real time while preserving the neural network’s ability to capture complex behavior. As a result, the controller becomes easier to implement on practical hardware while still handling nonlinearities and disturbances effectively.
Proof on Paper, Then in Simulation and Hardware
Mathematically, the authors analyze the combined observer–controller using Lyapunov theory, a standard tool for studying stability. They show that the estimation errors of the observer, the position tracking error, and the neural-network adaptation error all converge to small neighborhoods around zero in finite time, even in the presence of bounded disturbances. They then test their design in computer simulations, where the actuator follows a sinusoidal position command under strong, time-varying disturbances. Compared with two other advanced methods—a neural-network backstepping controller and a neural-network–assisted PID controller—the new approach achieves the smallest standard deviation, average error, and maximum error.
Real-World Tests With Demanding Motions
The researchers go a step further by implementing their controller on a laboratory electro-hydrostatic test bench that uses only a position sensor. They run two challenging scenarios: a steadily increasing ramp motion and a fast-changing sinusoidal motion. In both cases, the observer successfully reconstructs the internal states from the single position signal, allowing the controller to react promptly. The proposed method consistently delivers tighter tracking than the comparison controllers, with lower average and peak errors. This improved accuracy does come with a price: the control signal is more energetic and shows noticeable high-frequency action, reflecting the strong corrections used to reject disturbances.
What This Means for Future Machines
In plain terms, this work shows that heavy-duty hydraulic drives can be controlled more precisely and more quickly, using fewer sensors and without a perfect mathematical model. By combining a fast-converging control structure, a lean neural network adaptation rule, and a state observer, the authors demonstrate both on paper and in experiments that an electro-hydrostatic actuator can follow demanding motion commands with smaller errors than competing methods. Such advances could translate into more accurate industrial robots, safer aircraft actuation systems, and more efficient construction machinery. Future research will aim to refine the tuning of the controller gains and to reduce chattering, pushing these benefits closer to deployment in real-world products.
Citation: Phan, V.D., Nguyen, H.L., Le, V.C. et al. Position tracking control of electro-hydrostatic actuators via adaptive finite-time backstepping and state observation. Sci Rep 16, 14433 (2026). https://doi.org/10.1038/s41598-026-44019-0
Keywords: electro-hydrostatic actuator, hydraulic motion control, adaptive control, finite-time stability, neural network observer