Clear Sky Science · zh
评估基于人工智能的控制算法以部署于可负担的桡骨远端肌电义肢
让人工手更易获得的新途径
对于数百万截肢于前臂的人而言,尤其是在低收入和中等收入国家,因成本和技术复杂性,先进的人工手仍然难以企及。本研究探讨智能计算程序如何将肌肉发出的微弱电信号转换为简单的手部动作,目的是构建一种既可靠又可为每位使用者定制的可负担义肢手。 
为什么肌肉信号重要
每当我们移动手时,肌肉会产生可在皮肤表面检测到的微弱电信号。这些信号称为表面肌电图,可揭示一个人试图做出的动作,即使手部缺失亦然。许多现代义肢手依赖这些信号,但在现实中这些信号往往嘈杂且不稳定。传感垫可能移位,肌肉可能虚弱或瘢痕化,手臂位置变化也会改变信号。在无截肢者上表现良好的系统,在实际义肢使用者身上常常失效,后者可能功能肌肉更少且解剖差异更大。这一差距使得为真正需要的人设计既准确、舒适又低成本的义肢控制系统变得困难。
构建面向现实世界的数据基础
为了解决这一问题,研究人员从秘鲁20名因创伤或先天原因失去前臂的成年人处收集了新数据集。每位参与者在残肢前臂佩戴两枚小型无线传感单元,六个传感点覆盖主要的屈肌和伸肌群。参与者在坐姿和站姿、不同肘肩位置下尝试三种简单的腕部相关手势——屈腕、伸腕以及拇指与中指捏合。每人总共执行240次手势尝试,产生数百个文件,记录肌电信号随姿势和用力变化的情况。通过只针对截肢者并标准化电极放置,团队创建了一个针对义肢控制研究的现实且公开可用的数据集。
教算法“读懂”身体
拿到该数据集后,团队测试了四类机器学习算法:神经网络、随机森林、梯度提升树和决策树。他们将每个肌电信号切成短且重叠的时间窗,模拟真实义肢如何持续监听身体。从每个时间窗提取一组数值特征,捕捉所有六通道的信号强度、变异性和复杂性。为避免冗余并降低计算负担,研究者使用基于距离的方法筛选出五个信息量最大的特征。与其让单一算法一次识别多个动作,他们构建了一个两步“堆叠”模型:第一步判断人是在静止还是在移动;仅当检测到移动时,第二步才判断动作是屈腕还是伸腕。 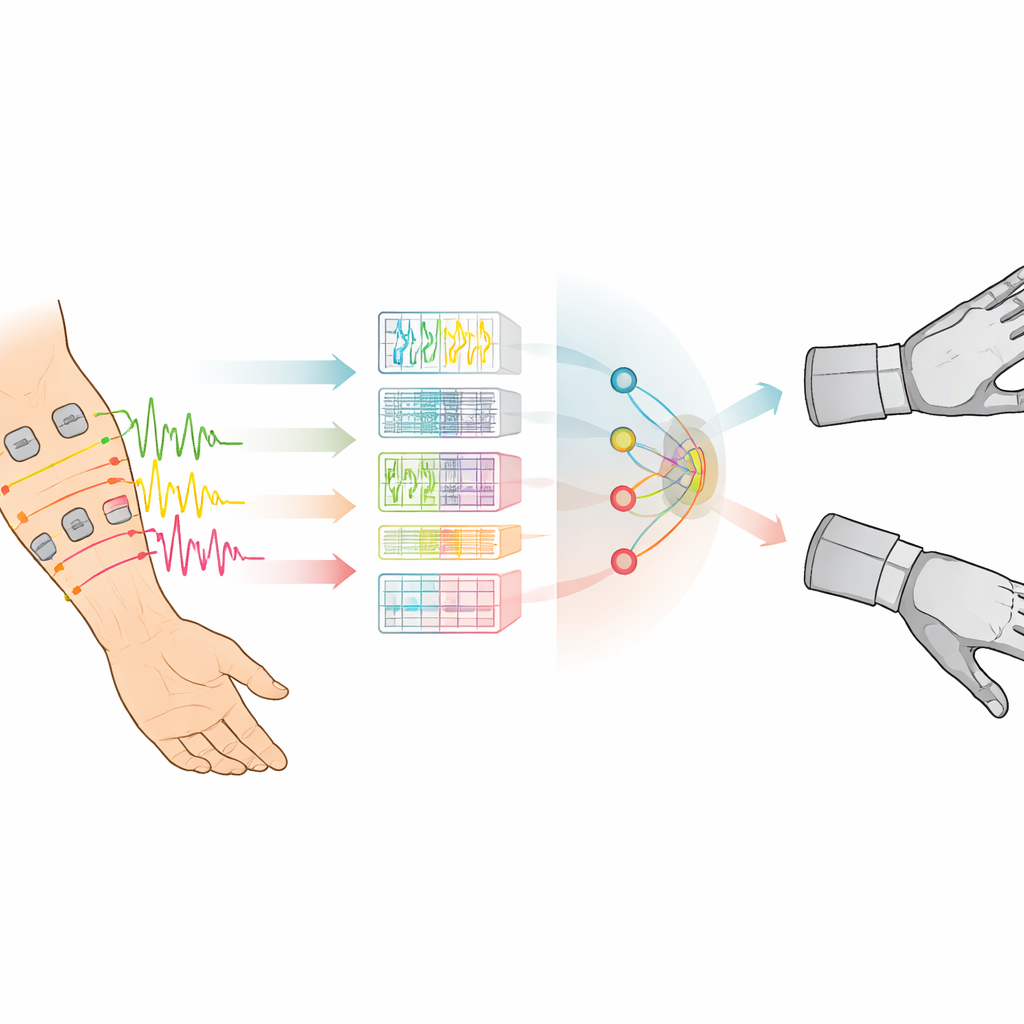
系统的表现如何
基于决策树家族的堆叠模型,尤其是随机森林和梯度提升,表现最佳。仅使用五个关键特征和稍长的时间窗,该组合方法在区分个体用户的静止、屈腕和伸腕方面平均准确率超过97%。相比之下,神经网络更不稳定且对个体差异更敏感。研究还考察了哪些用户特征会影响性能。先天肢体差异者和截肢位置更远离肘部(更远端)者往往获得更高的准确率,可能是因为他们的残余肌肉更健康且界定更清晰。失去肢体处于中等时长的参与者表现尤其好,这提示肌肉和运动习惯的长期适应也很重要。
从实验室走向廉价设备
为验证这些算法能否在可负担硬件上运行,团队将其部署在紧凑的 Raspberry Pi Zero 2 W 计算机上,该平台小到可装入义肢手内。使用较短时间窗和基于树的方法的模型能够近实时地对腕部动作进行分类,尽管某些更大配置超过了设备的限制,需要进一步优化。对一名参与者的初步测试表明,使用梯度提升的堆叠模型能够在多种手臂位置下准确识别意图动作,而对近期预测的多数表决有助于平滑短暂的误读。
这对未来人工手意味着什么
简而言之,本研究表明,一种智能但相对简单的算法组合能够可靠地解读真实义肢使用者的肌电信号,并可在低成本电子设备上运行。通过以截肢者的专用数据集为基础,并为每位使用者精细调优模型,作者勾画出通向低成本、个性化并能自然响应用户意图的义肢手的路径。下一步是将该系统嵌入实体设备并在日常活动中测试,使人工手不仅在技术上先进,而且更易获得、更便于日常使用。
引用: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
关键词: 肌电义肢, 表面肌电图, 机器学习, 上肢截肢, 义肢控制