Clear Sky Science · pl
Ocena algorytmów sterowania opartych na sztucznej inteligencji do wdrożenia w przystępnej protezie mioelektrycznej przedramienia
Nowe sposoby na zwiększenie dostępności sztucznych dłoni
Dla milionów osób żyjących z amputacjami przedramienia, zwłaszcza w krajach o niskich i średnich dochodach, zaawansowane sztuczne dłonie pozostają poza zasięgiem ze względu na koszty i złożoność techniczną. W badaniu tym analizowano, jak inteligentne programy komputerowe mogą przetwarzać drobne sygnały elektryczne z mięśni na proste ruchy dłoni, z celem zbudowania przystępnej cenowo protezy ręki, która będzie jednocześnie niezawodna i dopasowana do konkretnego użytkownika. 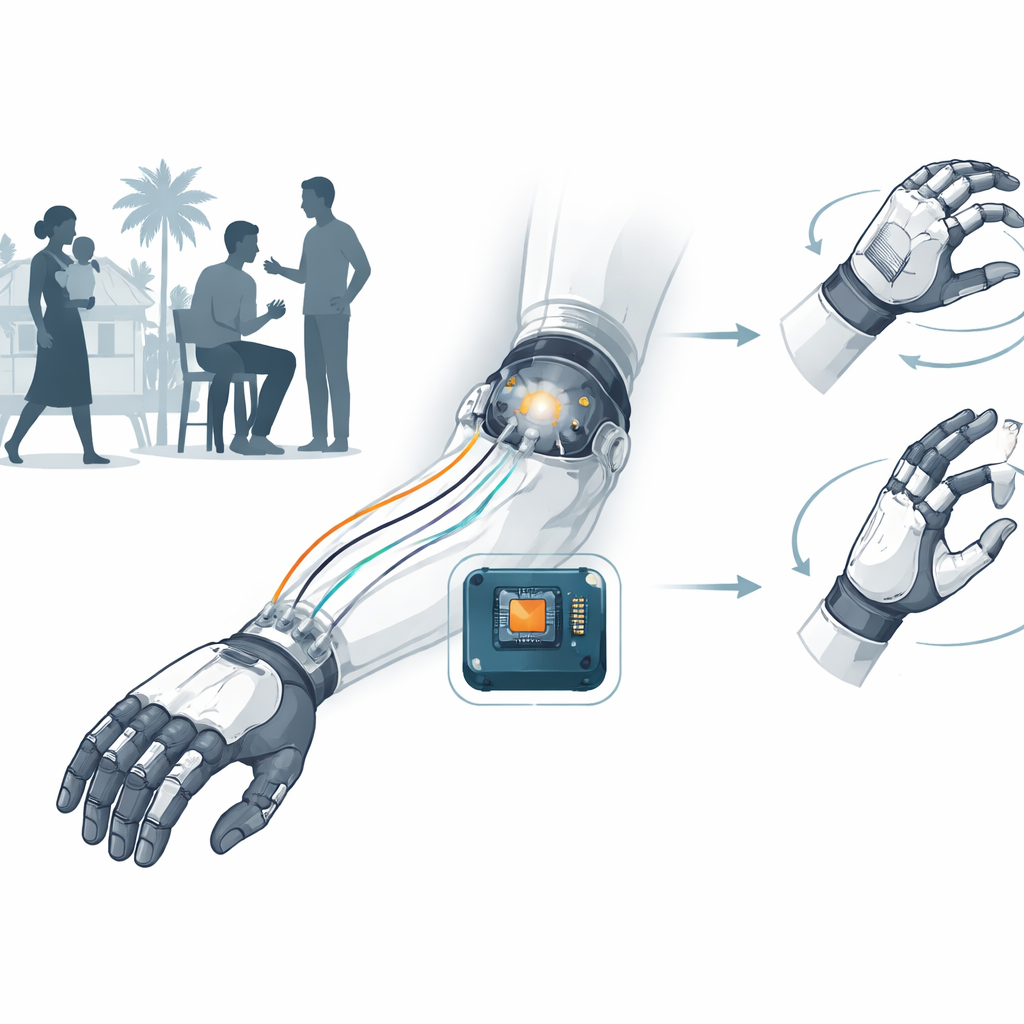
Dlaczego sygnały mięśniowe mają znaczenie
Zawsze, gdy poruszamy rękami, nasze mięśnie generują słabe sygnały elektryczne, które można rejestrować na powierzchni skóry. Te sygnały, znane jako powierzchniowa elektromiografia, mogą ujawnić, jaki ruch osoba próbuje wykonać, nawet jeśli ręki brakuje. Wiele nowoczesnych protez opiera się na tych sygnałach, ale w praktyce są one nieuporządkowane i niestabilne. Poduszki sensorów mogą się przesuwać, mięśnie mogą być osłabione lub zbliznowacone, a pozycja ramienia zmienia sygnały. Systemy działające dobrze u osób bez amputacji często zawodzą u rzeczywistych użytkowników protez, którzy mogą mieć mniej funkcjonalnych mięśni i bardziej zróżnicowaną anatomię. Ta luka utrudnia zaprojektowanie systemów sterowania protezami, które byłyby dokładne, wygodne i przystępne dla osób, które ich najbardziej potrzebują.
Budowanie bazy danych z realnego świata
Aby sprostać temu problemowi, badacze zebrali nowy zestaw danych od 20 dorosłych w Peru, którzy mieli amputację na poziomie przedramienia spowodowaną urazem lub warunkami wrodzonymi. Każda osoba nosiła dwie małe bezprzewodowe jednostki sensoryczne na pozostałym przedramieniu, z sześcioma punktami pomiarowymi rozmieszczonymi nad głównymi grupami mięśni zginaczy i prostowników. Uczestnicy podejmowali trzy proste gesty związane z nadgarstkiem — zgięcie nadgarstka, odwiedzenie (wyprost) oraz szczypanie kciuka z palcem środkowym — siedząc i stojąc, oraz przy różnych pozycjach łokcia i barku. W sumie każda osoba wykonała 240 prób gestów, generując setki plików obrazujących, jak sygnały mięśniowe zmieniają się wraz z postawą i wysiłkiem. Skupiając się wyłącznie na osobach po amputacjach i standaryzując rozmieszczenie elektrod, zespół stworzył realistyczny, publicznie dostępny zestaw danych specjalnie zaprojektowany do badań nad sterowaniem protez.
Nauczanie algorytmów rozumienia ciała
Posiadając ten zestaw danych, zespół przetestował cztery typy algorytmów uczenia maszynowego: sieci neuronowe, lasy losowe, gradient boosting oraz drzewa decyzyjne. Podzielili każdy sygnał mięśniowy na krótkie, nakładające się okna czasowe, naśladując sposób, w jaki rzeczywista proteza ciągle nasłuchuje organizmu. Z każdego okna wydobyli niewielki zestaw cech liczbowych opisujących siłę sygnału, jego zmienność i złożoność we wszystkich sześciu kanałach. Aby uniknąć nadmiarowości i zmniejszyć obciążenie obliczeniowe, zastosowali metodę opartą na odległości do wyboru pięciu najbardziej informatywnych cech. Zamiast prosić jeden algorytm o rozpoznanie kilku ruchów jednocześnie, zbudowali dwustopniowy model „stacked”. W pierwszym kroku decyduje się, czy osoba odpoczywa, czy się porusza; drugi krok, wywoływany tylko gdy wykryte zostanie ruch, rozstrzyga, czy akcja to zgięcie nadgarstka czy jego wyprost. 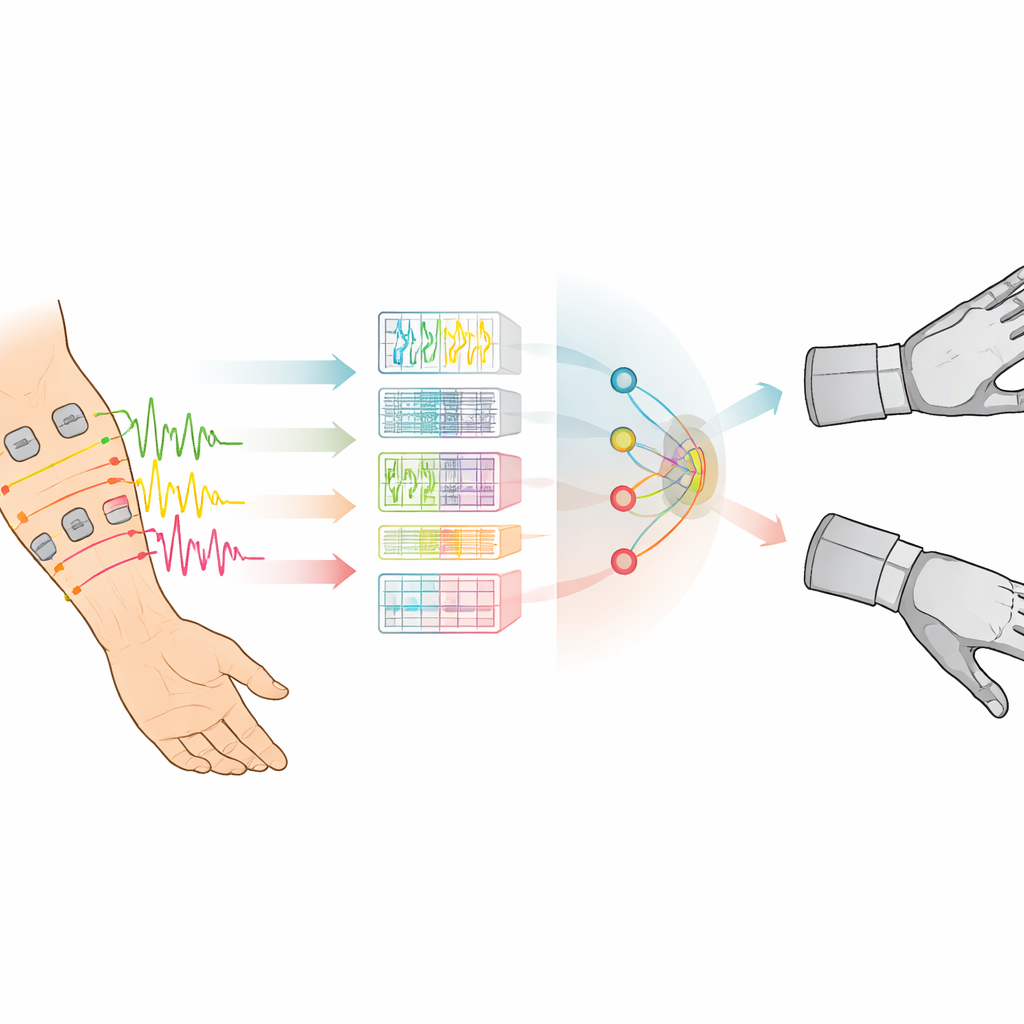
Jak dobrze system działał
Modele warstwowe oparte na rodzinie drzew decyzyjnych, szczególnie lasy losowe i gradient boosting, wypadły najlepiej. Używając tylko pięciu kluczowych cech i nieco dłuższych okien czasowych, podejście to osiągnęło średnią dokładność powyżej 97% w rozróżnianiu odpoczynku, zgięcia i wyprostu dla poszczególnych użytkowników. Sieci neuronowe były z kolei mniej stabilne i bardziej wrażliwe na różnice między osobami. Badanie zbadało również, które cechy użytkowników wpływają na wyniki. Osoby z wrodzonymi różnicami kończyny i te z amputacjami bardziej dystalnymi (dalej od łokcia) miały tendencję do osiągania wyższej dokładności, prawdopodobnie dlatego, że ich pozostałe mięśnie są zdrowsze i lepiej zdefiniowane. Uczestnicy, którzy żyli z utratą kończyny przez średni okres czasu, również uzyskali szczególnie dobre wyniki, co sugeruje, że długoterminowa adaptacja mięśni i nawyków ruchowych ma znaczenie.
Z laboratorium do niskokosztowego urządzenia
Aby sprawdzić, czy te algorytmy można uruchomić na przystępnym sprzęcie, zespół wdrożył je na kompaktowym komputerze Raspberry Pi Zero 2 W, platformie na tyle małej, że można ją zmieścić wewnątrz protezy ręki. Modele używające krótszych okien czasowych i metod opartych na drzewach potrafiły klasyfikować ruchy nadgarstka w niemal rzeczywistym czasie, choć niektóre większe konfiguracje przekroczyły możliwości urządzenia i będą wymagać dalszej optymalizacji. Testy wstępne z jednym uczestnikiem wykazały, że modele warstwowe z gradient boosting mogły dokładnie rozpoznawać zamierzone ruchy w różnych pozycjach ramienia, a większościowe głosowanie nad ostatnimi predykcjami pomagało wygładzać krótkotrwałe błędne odczyty.
Co to oznacza dla przyszłych sztucznych dłoni
Mówiąc wprost, badanie pokazuje, że inteligentne, ale stosunkowo proste połączenie algorytmów może wiarygodnie interpretować sygnały mięśniowe od rzeczywistych użytkowników protez i może działać na taniej elektronice. Opierając pracę na dedykowanym zestawie danych od osób po amputacjach i starannie dostrajając modele dla każdego użytkownika, autorzy wyznaczają drogę do niskokosztowych, spersonalizowanych protez ręki, które reagują naturalnie na zamiary użytkownika. Kolejne kroki to osadzenie tego systemu w fizycznych urządzeniach i przetestowanie go podczas codziennych czynności, co przybliży powstanie sztucznych dłoni nie tylko zaawansowanych technicznie, lecz także szeroko dostępnych i prostszych w codziennym użyciu.
Cytowanie: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
Słowa kluczowe: proteza mioelektryczna, powierzchniowa elektromiografia, uczenie maszynowe, amputacja kończyny górnej, sterowanie protezą