Clear Sky Science · sv
Utvärdering av AI-baserade styralgoritmer för implementering i en prisvärd transradial myoelektrisk protes
Nya sätt att göra konstgjorda händer mer tillgängliga
För miljontals människor som lever med underarmsamputationer, särskilt i låg- och medelinkomstländer, är avancerade konstgjorda händer ofta utom räckhåll på grund av kostnad och teknisk komplexitet. Denna studie undersöker hur intelligenta datorprogram kan översätta svaga elektriska signaler från muskler till enkla handrörelser, med målet att bygga en prisvärd proteshand som både är pålitlig och anpassad till varje användare. 
Varför muskelsignaler är viktiga
När vi rör våra händer producerar musklerna svaga elektriska signaler som kan fångas på hudytan. Dessa signaler, kända som yt-elektromyografi, kan avslöja vilken rörelse en person försöker utföra, även om handen saknas. Många moderna proteshänder förlitar sig på dessa signaler, men i verkligheten är de brusiga och instabila. Sensorplattor kan förskjutas, muskler kan vara svaga eller ärrade och armens position förändrar signalerna. System som fungerar väl på personer utan amputationer misslyckas ofta när de används av verkliga protesanvändare, som kan ha färre fungerande muskler och mer varierad anatomi. Denna klyfta har gjort det svårt att designa styrsystem för proteser som är precisa, bekväma och prisvärda för dem som behöver dem mest.
Att bygga en verklighetsförankrad databas
För att tackla problemet samlade forskarna en ny datamängd från 20 vuxna i Peru som hade underarmsamputationer till följd av trauma eller medfödda tillstånd. Varje person bar två små trådlösa sensorenheter på sitt kvarvarande underarm, med sex mätpunkter fördelade över de stora flexor- och extensorgrupperna. Deltagarna försökte tre enkla handledsrelaterade gester—böjning av handleden, extension och nypning med tumme och långfinger—samtidigt som de satt och stod och med olika armbågs- och skulderpositioner. Totalt utförde varje person 240 gestförsök, vilket genererade hundratals filer som fångar hur muskelsignaler förändras med hållning och ansträngning. Genom att fokusera enbart på personer med amputationer och standardisera elektrodplaceringen skapade teamet en realistisk, offentligt tillgänglig datamängd speciellt avsedd för forskning om protesstyrning.
Att lära algoritmer läsa kroppen
Med denna datamängd testade teamet fyra typer av maskininlärningsalgoritmer: neurala nätverk, random forests, gradient boosting-träd och beslutsstammar. De delade upp varje muskelsignal i korta överlappande tidsfönster, vilket efterliknar hur en verklig proteshand kontinuerligt skulle lyssna på kroppen. Från varje fönster extraherade de en liten uppsättning numeriska egenskaper som fångar signalstyrka, variation och komplexitet över alla sex kanaler. För att undvika redundans och minska beräkningsbelastningen använde de en avståndsbaserad metod för att välja de fem mest informativa egenskaperna. Istället för att låta en algoritm känna igen flera rörelser samtidigt byggde de en tvåstegs-”stackad” modell. Första steget avgör om personen vilar eller rör sig; det andra steget, anropat endast när rörelse upptäcks, avgör om handlingen är handledsböjning eller -extension. 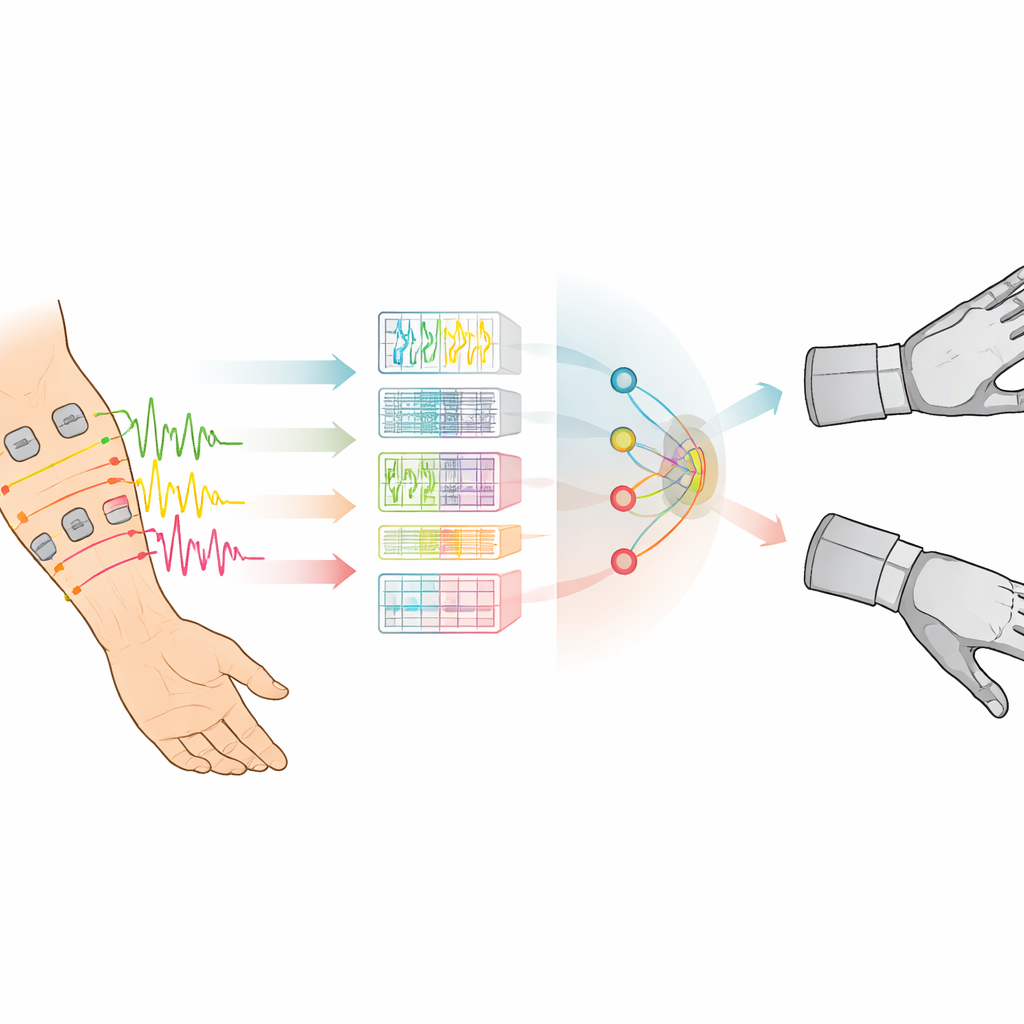
Hur väl systemet presterade
De stackade modellerna baserade på besluts-trädfamiljer, särskilt random forests och gradient boosting, presterade bäst. Genom att använda endast fem nyckelfunktioner och något längre tidsfönster nådde den kombinerade metoden genomsnittliga noggrannheter över 97 % för att skilja vila, böjning och extension för individuella användare. Neurala nätverk var däremot mindre stabila och mer känsliga för skillnader mellan personer. Studien undersökte också vilka användarkarakteristika som påverkade prestanda. Personer med medfödda lemmsskillnader och de med mer distala (längre från armbågen) amputationer tenderade att uppnå högre noggrannhet, sannolikt eftersom deras kvarvarande muskler är friskare och bättre definierade. Deltagare som levt med lemmförlust under en måttlig tidsperiod visade också särskilt goda resultat, vilket tyder på att långsiktig anpassning av muskler och rörelsemönster spelar roll.
Från labbet till en lågkostnadsenhet
För att se om dessa algoritmer kunde köras på prisvärd hårdvara distribuerade teamet dem på en kompakt Raspberry Pi Zero 2 W-dator, en plattform tillräckligt liten för att rymmas i en proteshand. Modeller som använde kortare tidsfönster och träd-baserade metoder kunde klassificera handledsrörelser i nästan realtid, även om vissa större konfigurationer överskred enhetens gränser och kräver vidare optimering. Initiala tester med en deltagare visade att stackade modeller med gradient boosting korrekt kunde identifiera avsedda rörelser i olika armpositioner, medan majoritetsröstning över nyligen gjorda prediktioner bidrog till att jämna ut korta feltolkningar.
Vad detta betyder för framtidens konstgjorda händer
Kort sagt visar denna studie att en smart men relativt enkel kombination av algoritmer pålitligt kan tolka muskelsignaler från verkliga protesanvändare och kan köras på billig elektronik. Genom att förankra arbetet i en dedikerad datamängd från personer med amputationer och noggrant anpassa modellerna för varje individ beskriver författarna en väg mot lågkostnads, personliga proteshänder som reagerar naturligt på användarens intentioner. Nästa steg blir att bygga in detta system i fysiska enheter och testa det under vardagsaktiviteter, för att komma närmare konstgjorda händer som inte bara är tekniskt avancerade utan också allmänt tillgängliga och enklare att leva med.
Citering: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
Nyckelord: myoelektrisk protes, yt-elektromyografi, maskininlärning, amputation av övre extremitet, protesstyrning