Clear Sky Science · es
Evaluación de algoritmos de control basados en inteligencia artificial para implementar en una prótesis mioeléctrica transradial asequible
Nuevas vías para hacer las manos artificiales más accesibles
Para millones de personas con amputaciones de antebrazo, especialmente en países de ingresos bajos y medios, las manos artificiales avanzadas siguen siendo inaccesibles por su coste y complejidad técnica. Este estudio explora cómo programas informáticos inteligentes pueden traducir pequeñas señales eléctricas musculares en movimientos simples de la mano, con el objetivo de construir una mano protésica asequible que sea fiable y adaptada a cada usuario. 
Por qué importan las señales musculares
Cada vez que movemos las manos, nuestros músculos generan señales eléctricas débiles que pueden captarse en la superficie de la piel. Estas señales, conocidas como electromiografía de superficie, pueden revelar el movimiento que una persona intenta realizar, incluso si falta la mano. Muchas manos protésicas modernas dependen de estas señales, pero en la vida real son ruidosas e inestables. Las almohadillas sensoras pueden desplazarse, los músculos pueden estar debilitados o con cicatrices, y la posición del brazo cambia las señales. Los sistemas que funcionan bien en personas sin amputaciones a menudo fallan cuando se usan con usuarios reales de prótesis, que pueden tener menos músculos funcionales y una anatomía más variable. Esta brecha ha dificultado diseñar sistemas de control protésico que sean precisos, cómodos y asequibles para quienes más los necesitan.
Construyendo una base de datos del mundo real
Para abordar este problema, los investigadores recopilaron un nuevo conjunto de datos de 20 adultos en Perú que habían perdido el miembro a nivel de antebrazo por trauma o condiciones congénitas. Cada persona llevaba dos pequeñas unidades sensoras inalámbricas en el antebrazo residual, con seis puntos de detección distribuidos sobre los principales grupos musculares flexores y extensores. Los participantes intentaron tres gestos simples relacionados con la muñeca: flexionarla, extenderla y pinzar con el pulgar y el dedo medio —sentados y de pie, y con distintas posiciones de codo y hombro. En total, cada persona realizó 240 intentos de gesto, generando cientos de archivos que capturan cómo cambian las señales musculares con la postura y el esfuerzo. Al centrarse únicamente en personas con amputaciones y estandarizar la colocación de electrodos, el equipo creó un conjunto de datos realista y de acceso público diseñado específicamente para la investigación en control protésico.
Enseñando a los algoritmos a leer el cuerpo
Con este conjunto de datos, el equipo probó cuatro tipos de algoritmos de aprendizaje automático: redes neuronales, bosques aleatorios, árboles de impulso por gradiente (gradient boosting) y árboles de decisión. Cortaron cada señal muscular en ventanas de tiempo cortas y solapadas, imitando cómo una mano protésica real escucharía continuamente el cuerpo. De cada ventana extrajeron un pequeño conjunto de características numéricas que capturan la intensidad, la variación y la complejidad de la señal en los seis canales. Para evitar redundancias y reducir la carga computacional, usaron un método basado en distancia para seleccionar las cinco características más informativas. En lugar de pedir a un solo algoritmo que reconociera varios movimientos a la vez, construyeron un modelo apilado de dos pasos. El primer paso decide si la persona está en reposo o moviéndose; el segundo paso, que se activa solo cuando se detecta movimiento, decide si la acción es flexión o extensión de la muñeca. 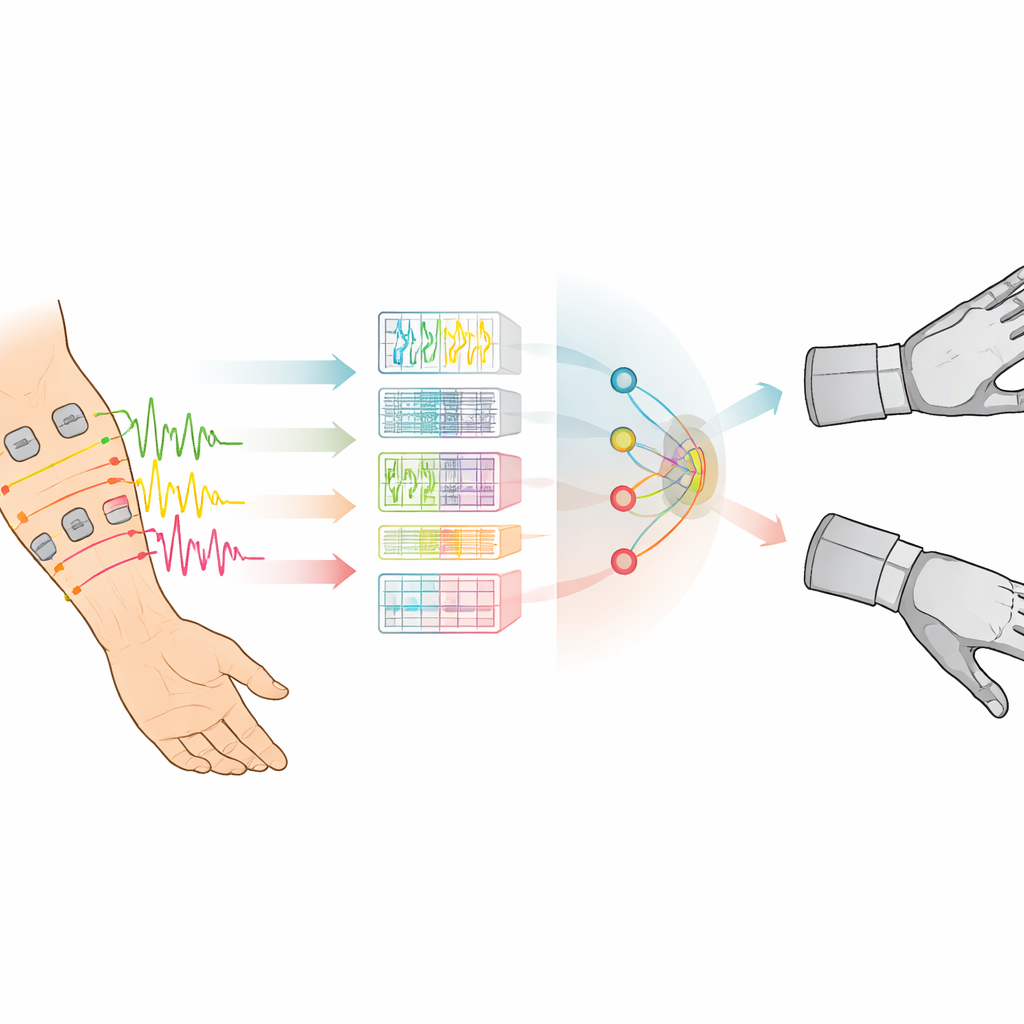
Cómo se desempeñó el sistema
Los modelos apilados basados en familias de árboles de decisión, especialmente los bosques aleatorios y el gradient boosting, fueron los que mejor rendimiento obtuvieron. Usando solo cinco características clave y ventanas de tiempo ligeramente más largas, el enfoque combinado alcanzó precisiones medias superiores al 97% para distinguir reposo, flexión y extensión en usuarios individuales. Las redes neuronales, en contraste, fueron menos estables y más sensibles a las diferencias entre personas. El estudio también examinó qué características de los usuarios influían en el rendimiento. Las personas con diferencias congénitas de miembro y aquellas con amputaciones más distales (más alejadas del codo) tendieron a lograr mayor precisión, probablemente porque sus músculos residuales están más sanos y mejor definidos. Los participantes que habían vivido con la pérdida del miembro durante un tiempo intermedio también mostraron resultados especialmente buenos, lo que sugiere que la adaptación muscular y los hábitos de movimiento a largo plazo importan.
Del laboratorio a un dispositivo de bajo coste
Para comprobar si estos algoritmos podían ejecutarse en hardware asequible, el equipo los desplegó en un compacto ordenador Raspberry Pi Zero 2 W, una plataforma lo bastante pequeña como para caber dentro de una mano protésica. Los modelos que usaban ventanas de tiempo más cortas y métodos basados en árboles pudieron clasificar los movimientos de la muñeca casi en tiempo real, aunque algunas configuraciones más grandes superaron los límites del dispositivo y requerirán mayor optimización. Pruebas iniciales con un participante mostraron que los modelos apilados con gradient boosting podían identificar con precisión los movimientos intentados en diversas posiciones del brazo, mientras que un voto mayoritario sobre predicciones recientes ayudó a suavizar errores puntuales.
Qué significa esto para las futuras manos artificiales
En términos sencillos, este estudio demuestra que una combinación de algoritmos inteligente pero relativamente simple puede interpretar de forma fiable las señales musculares de usuarios reales de prótesis y puede ejecutarse en electrónica económica. Al basar su trabajo en un conjunto de datos dedicado a personas con amputaciones y ajustar cuidadosamente los modelos para cada individuo, los autores trazan un camino hacia manos protésicas personalizadas y de bajo coste que responden de forma natural a las intenciones del usuario. Los siguientes pasos serán integrar este sistema en dispositivos físicos y probarlo durante actividades cotidianas, avanzando hacia manos artificiales que no solo sean técnicamente avanzadas, sino también ampliamente accesibles y más fáciles de convivir.
Cita: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
Palabras clave: prótesis mioeléctrica, electromiografía de superficie, aprendizaje automático, amputación de miembro superior, control protésico