Clear Sky Science · de
Bewertung von KI-basierten Steuerungsalgorithmen zur Implementierung in einer erschwinglichen transradialen myoelektrischen Prothese
Neue Wege, künstliche Hände zugänglicher zu machen
Für Millionen von Menschen mit Unterarmamputationen, insbesondere in Ländern mit niedrigem und mittlerem Einkommen, bleiben fortschrittliche künstliche Hände aufgrund von Kosten und technischer Komplexität unerreichbar. Diese Studie untersucht, wie intelligente Computerprogramme winzige elektrische Signale aus Muskeln in einfache Handbewegungen übersetzen können, mit dem Ziel, eine erschwingliche Prothese zu entwickeln, die sowohl zuverlässig als auch auf den einzelnen Nutzer zugeschnitten ist. 
Warum Muskelsignale wichtig sind
Immer wenn wir unsere Hände bewegen, erzeugen unsere Muskeln schwache elektrische Signale, die an der Hautoberfläche erfasst werden können. Diese Signale, bekannt als Oberflächen-Elektromyographie, können zeigen, welche Bewegung eine Person zu machen versucht, selbst wenn die Hand fehlt. Viele moderne Prothesen stützen sich auf diese Signale, aber in der Praxis sind sie unordentlich und instabil. Sensorpads können verrutschen, Muskeln können schwach oder vernarbt sein, und die Armposition verändert die Signale. Systeme, die bei nicht amputierten Personen gut funktionieren, versagen häufig bei tatsächlichen Prothesennutzern, die möglicherweise weniger funktionale Muskeln und variablere Anatomie haben. Diese Lücke macht es schwierig, Steuerungssysteme für Prothesen zu entwickeln, die genau, komfortabel und erschwinglich für die Menschen sind, die sie am meisten benötigen.
Aufbau einer realitätsnahen Datengrundlage
Um dieses Problem anzugehen, sammelten die Forscher einen neuen Datensatz von 20 Erwachsenen in Peru, die auf Unterarmhöhe Gliedmaßenverluste durch Trauma oder angeborene Bedingungen hatten. Jede Person trug zwei kleine drahtlose Sensoreinheiten am Restunterarm, mit sechs Messpunkten verteilt über die Hauptbeuger- und Streckermuskulatur. Die Teilnehmenden versuchten drei einfache gelenkbezogene Gesten—Handgelenksbeugung, -streckung und Zangengriff mit Daumen und Mittelfinger—während sie saßen und standen sowie in unterschiedlichen Ellenbogen- und Schulterstellungen. Insgesamt führte jede Person 240 Gesteversuche aus und erzeugte Hunderte von Dateien, die zeigen, wie sich Muskelsignale mit Haltung und Kraftanstrengung ändern. Indem sie sich ausschließlich auf Menschen mit Amputationen konzentrierten und die Elektrodenplatzierung standardisierten, schuf das Team einen realistischen, öffentlich verfügbaren Datensatz, der speziell für die Forschung an Prothesensteuerung konzipiert ist.
Algorithmen das Lesen des Körpers beibringen
Mit diesem Datensatz testete das Team vier Typen von maschinellen Lernalgorithmen: neuronale Netze, Random Forests, Gradient Boosting Trees und Entscheidungsbäume. Sie zerschnitten jedes Muskelsignal in kurze überlappende Zeitfenster, um zu simulieren, wie eine echte Prothese kontinuierlich auf den Körper hört. Aus jedem Fenster extrahierten sie eine kleine Menge numerischer Merkmale, die Signalstärke, Variabilität und Komplexität über alle sechs Kanäle erfassen. Um Redundanz zu vermeiden und die Rechenlast zu reduzieren, verwendeten sie eine distanzbasierte Methode, um die fünf informativeren Merkmale auszuwählen. Statt einen Algorithmus mehrere Bewegungen gleichzeitig erkennen zu lassen, bauten sie ein zweistufiges „gestapeltes“ Modell. Der erste Schritt entscheidet, ob die Person ruht oder sich bewegt; der zweite Schritt, aufgerufen nur bei erkannter Bewegung, unterscheidet, ob die Aktion Handgelenksbeugung oder -streckung ist. 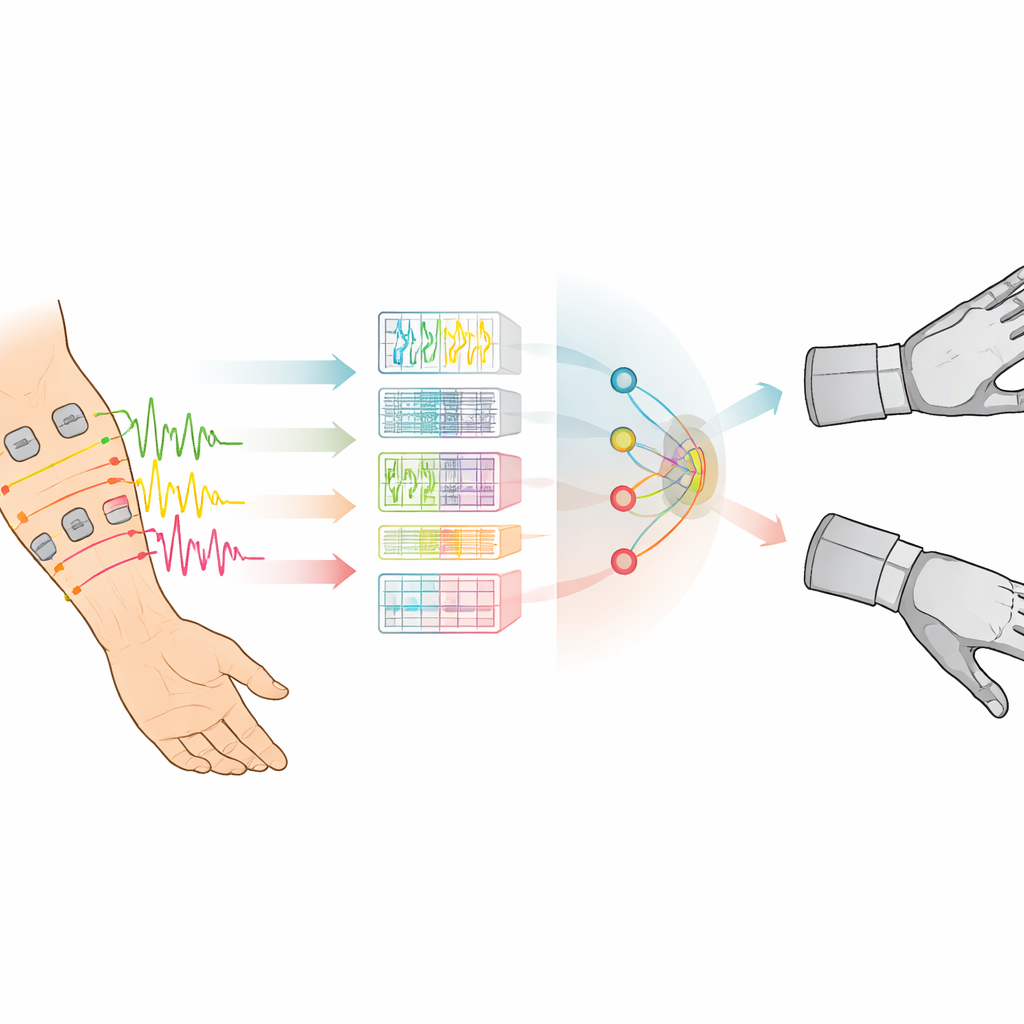
Wie gut das System abgeschnitten hat
Die gestapelten Modelle aus Entscheidungsbaum-Familien, insbesondere Random Forests und Gradient Boosting, lieferten die besten Ergebnisse. Mit nur fünf Schlüsselmerkmalen und etwas längeren Zeitfenstern erreichte der kombinierte Ansatz mittlere Genauigkeiten von über 97 % bei der Unterscheidung von Ruhe, Beugung und Streckung für einzelne Nutzer. Neuronale Netze waren dagegen weniger stabil und empfindlicher gegenüber Unterschieden zwischen Personen. Die Studie untersuchte auch, welche Nutzermerkmale die Leistung beeinflussten. Menschen mit angeborenen Gliedmaßenunterschieden und solche mit weiter distal (weiter vom Ellenbogen entfernt) gelegenen Amputationen erzielten tendenziell höhere Genauigkeiten, wahrscheinlich weil ihre restlichen Muskeln gesünder und klarer definiert sind. Teilnehmende, die mittellange Zeit mit Gliedmaßenverlust gelebt hatten, zeigten ebenfalls besonders starke Ergebnisse, was darauf hindeutet, dass langfristige Anpassungen von Muskeln und Bewegungsgewohnheiten eine Rolle spielen.
Vom Labor zu einem kostengünstigen Gerät
Um zu prüfen, ob diese Algorithmen auf erschwinglicher Hardware laufen können, setzten die Forschenden sie auf einem kompakten Raspberry Pi Zero 2 W-Computer ein, einer Plattform, die klein genug ist, um in eine Prothese zu passen. Modelle mit kürzeren Zeitfenstern und baumbasierten Methoden konnten Handgelenksbewegungen nahezu in Echtzeit klassifizieren, obwohl einige größere Konfigurationen die Grenzen des Geräts überschritten und weitere Optimierung erfordern. Erste Tests mit einer Teilnehmerin zeigten, dass gestapelte Modelle mit Gradient Boosting beabsichtigte Bewegungen in verschiedenen Armpositionen genau identifizieren konnten, während Mehrheitsentscheidungen über jüngste Vorhersagen kurzzeitige Fehlinterpretationen glätteten.
Was das für zukünftige künstliche Hände bedeutet
Kurz gesagt zeigt diese Studie, dass eine intelligente, aber relativ einfache Kombination von Algorithmen Muskelsignale von tatsächlichen Prothesennutzern zuverlässig interpretieren kann und auf kostengünstiger Elektronik lauffähig ist. Indem die Arbeit auf einem dedizierten Datensatz von Menschen mit Amputationen basiert und die Modelle individuell abgestimmt werden, skizzieren die Autorinnen und Autoren einen Weg zu kostengünstigen, personalisierten Prothesen, die natürlich auf die Absichten der Nutzer reagieren. Die nächsten Schritte bestehen darin, dieses System in physische Geräte zu integrieren und im Alltag zu testen, um künstliche Hände zu entwickeln, die nicht nur technisch ausgereift, sondern auch breit zugänglich und leichter im Alltag zu verwenden sind.
Zitation: Garcia, J.G., Luque, E.F., Romero, E. et al. Assessment of artificial intelligence-based control algorithms to be implemented in an affordable transradial myoelectric prosthesis. Sci Rep 16, 14382 (2026). https://doi.org/10.1038/s41598-026-43000-1
Schlüsselwörter: myoelektrische Prothese, Oberflächen-Elektromyographie, Maschinelles Lernen, Obere Gliedmaßenamputation, Prothesensteuerung